







xml格式
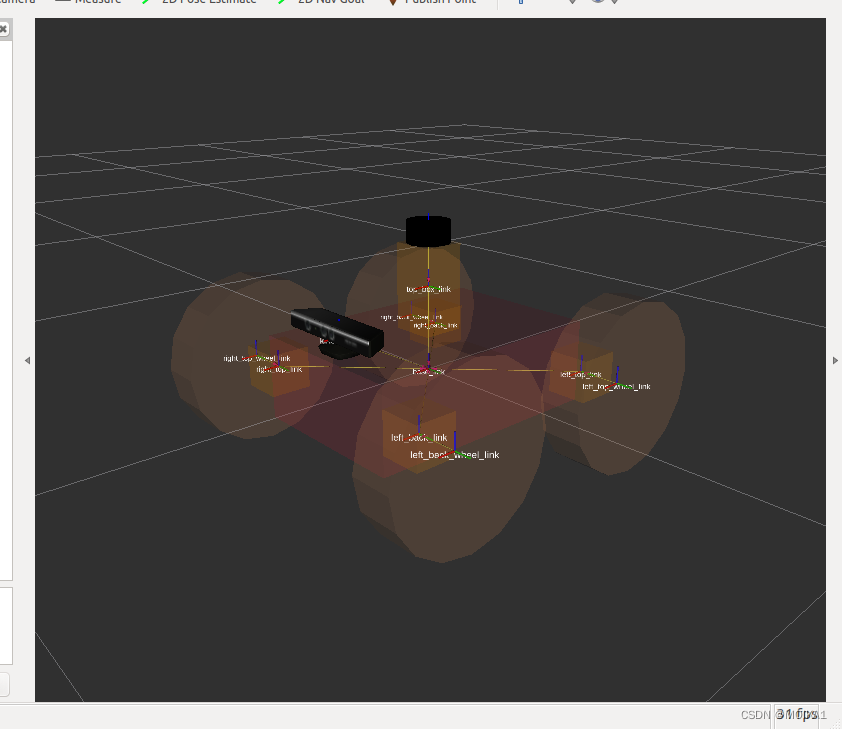
基础的一个模型
<?xml version="1.0" ?>
<robot name="car_base">
<link name="base_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="3"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.6 0.4 0.2" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.6 0.4 0.2" />
</geometry>
<material name="pp">
<color rgba="0.9 0.2 0.3 0.25"/>
</material>
</visual>
</link>
<link name="right_top_link" >
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
<material name="w">
<color rgba="1 0.6 0 0.25"/>
</material>
</visual>
</link>
<link name="right_back_link" >
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
<material name="w">
</material>
</visual>
</link>
<link name="left_top_link" >
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
<material name="w">
</material>
</visual>
</link>
<link name="left_back_link" >
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1" />
</geometry>
<material name="w">
</material>
</visual>
</link>
<link name="top_box_link" >
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.1"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 0.1 0.2" />
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.2" />
</geometry>
<material name="w">
</material>
</visual>
</link>
<joint name="joint_right_top" type="continuous">
<parent link="base_link"/>
<child link="right_top_link"/>
<origin xyz="0.25 -0.25 0" rpy="0 0 0" />
<axis xyz="0 1 0"/>
</joint>
<joint name="joint_right_back" type="continuous">
<parent link="base_link"/>
<child link="right_back_link"/>
<origin xyz="-0.25 -0.25 0" rpy="0 0 0" />
<axis xyz="0 1 0"/>
</joint>
<joint name="joint_left_top" type="continuous">
<parent link="base_link"/>
<child link="left_top_link"/>
<origin xyz="-0.25 0.25 0" rpy="0 0 0" />
<axis xyz="0 1 0"/>
</joint>
<joint name="joint_left_back" type="continuous">
<parent link="base_link"/>
<child link="left_back_link"/>
<origin xyz="0.25 0.25 0" rpy="0 0 0" />
<axis xyz="0 1 0"/>
</joint>
<joint name="joint_top_box" type="continuous">
<parent link="base_link"/>
<child link="top_box_link"/>
<origin xyz="0 0 0.2" rpy="0 0 0" />
<axis xyz="0 0 1"/>
</joint>
<joint name="right_top_wheel_joint" type="continuous">
<origin xyz="0 -0.1 0" rpy="0 0 0"/>
<parent link="right_top_link"/>
<child link="right_top_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_top_wheel_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
<material name="ww">
<color rgba="0.9 0.6 0.4 0.25"/>
</material>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<origin xyz="0 -0.1 0" rpy="0 0 0"/>
<parent link="right_back_link"/>
<child link="right_back_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_back_wheel_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
<material name="ww">
</material>
</visual>
</link>
<joint name="left_top_wheel_joint" type="continuous">
<origin xyz="0 0.1 0" rpy="0 0 0"/>
<parent link="left_top_link"/>
<child link="left_top_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_top_wheel_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
<material name="ww">
</material>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<origin xyz="0 0.1 0" rpy="0 0 0"/>
<parent link="left_back_link"/>
<child link="left_back_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_back_wheel_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="1.2"/>
<inertia ixx="3.125" ixy="0" ixz="0" iyy="10.625" iyz="0" izz="12.5" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.2" length = "0.1"/>
</geometry>
<material name="ww">
</material>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.125" rpy="0 0 0"/>
<parent link="top_box_link"/>
<child link="laser_link"/>
</joint>
<link name="laser_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="b"/>
<color rgba="0 0 0 0.25"/>
</visual>
</link>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
<joint name="kinect_joint" type="fixed">
<origin xyz="0.25 0 0.135" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
</robot>














 911
911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









