







 本文介绍了天鹰算法AO在多旅行商问题(MTSP)中的应用,结合贪婪算法求解MTSP,通过实验验证其有效性,展示了在物流配送、车辆调度等领域的潜力。Matlab代码示例提供了算法的实现细节。
本文介绍了天鹰算法AO在多旅行商问题(MTSP)中的应用,结合贪婪算法求解MTSP,通过实验验证其有效性,展示了在物流配送、车辆调度等领域的潜力。Matlab代码示例提供了算法的实现细节。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 问题描述
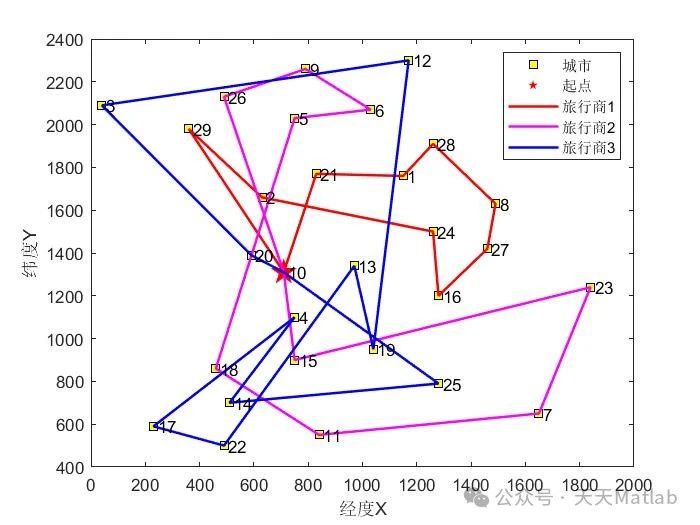
单仓库多旅行商问题(MTSP)是指在给定一组城市和一个仓库的情况下,找到一条最短的路径,使得每个城市都被访问一次,并且最终回到仓库。MTSP是旅行商问题(TSP)的扩展,TSP只考虑一个旅行商,而MTSP考虑多个旅行商。
MTSP在现实生活中有很多应用,例如物流配送、车辆调度、旅游路线规划等。解决MTSP可以帮助企业降低运输成本,提高效率。
2. 天鹰算法AO
天鹰算法AO(Aquila Optimizer AO)是一种新的元启发式算法,它模拟了天鹰捕猎的行为。天鹰算法AO具有较强的全局搜索能力和局部搜索能力,并且收敛速度快。
天鹰算法AO的基本步骤如下:
-
初始化种群:随机生成一组解,作为初始种群。
-
计算适应度:计算每个解的适应度,适应度越高,解越好。
-
选择:根据适应度,选择一部分解作为父代。
-
变异:对父代进行变异,产生新的解。
-
更新:将新的解添加到种群中,并删除适应度最低的解。
-
重复步骤2-5,直到满足终止条件。
3. 基于天鹰算法AO求解MTSP
为了求解MTSP,可以将天鹰算法AO与贪婪算法相结合。贪婪算法是一种简单的启发式算法,它总是选择当前最优的解。
基于天鹰算法AO求解MTSP的步骤如下:
-
初始化种群:随机生成一组解,作为初始种群。
-
计算适应度:计算每个解的适应度,适应度越高,解越好。
-
选择:根据适应度,选择一部分解作为父代。
-
变异:对父代进行变异,产生新的解。
-
贪婪算法:对新的解应用贪婪算法,得到局部最优解。
-
更新:将局部最优解添加到种群中,并删除适应度最低的解。
-
重复步骤2-6,直到满足终止条件。
📣 部分代码
function DrawPath(Chrom,X)%% 画路径函数%输入% Chrom 待画路径% X 各城市坐标位置R = Chrom(1, :); %一个随机解(个体)figure;hold onplot([X(R, 1); X(R(1), 1)], [X(R, 2); X(R(1), 2)], 'o', 'color', [0.5,0.5,0.5])plot(X(R(1), 1), X(R(1), 2), 'rv', 'MarkerSize', 20)plot(X(R(end), 1), X(R(end), 2), 'rs', 'MarkerSize', 20)text(X(R(1),1)+0.05, X(R(1),2)+0.05, [' 起点' num2str(R(1))], 'color', [1,0,0]);text(X(R(end),1)+0.05, X(R(end),2)+0.05, [' 终点' num2str(R(end))], 'color', [1,0,0]);for i = 1:size(X,1)if R(1) ~= i && R(end) ~= itext(X(i,1)+0.05, X(i,2)+0.05, num2str(i), 'color', [1,0,0]);endendA = [X(R, :); X(R(1), :)];row=size(A,1);for i=2:row[arrowx, arrowy] = dsxy2figxy(gca, A(i-1:i,1), A(i-1:i,2)); % 坐标转换annotation('textarrow', arrowx, arrowy, 'HeadWidth', 8, 'color', [0,0,1]);endhold offxlabel('横坐标')ylabel('纵坐标')title('轨迹图')box on
⛳️ 运行结果
4. 实验结果
为了验证基于天鹰算法AO求解MTSP的有效性,我们进行了实验。实验数据来自TSPLIB库,其中包含了各种规模的TSP和MTSP实例。
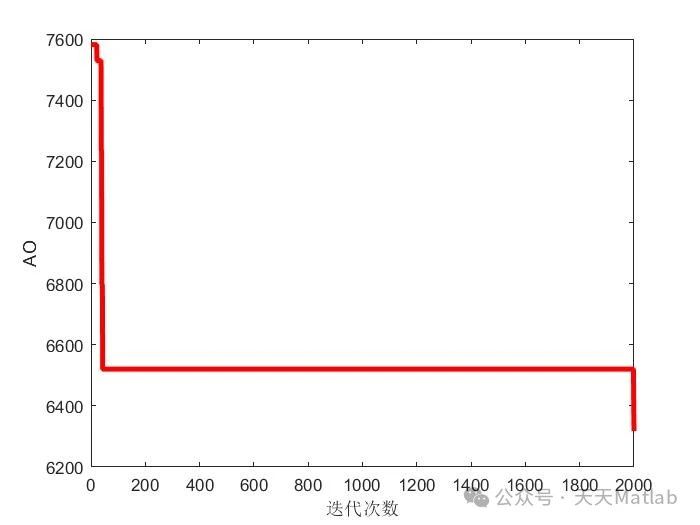
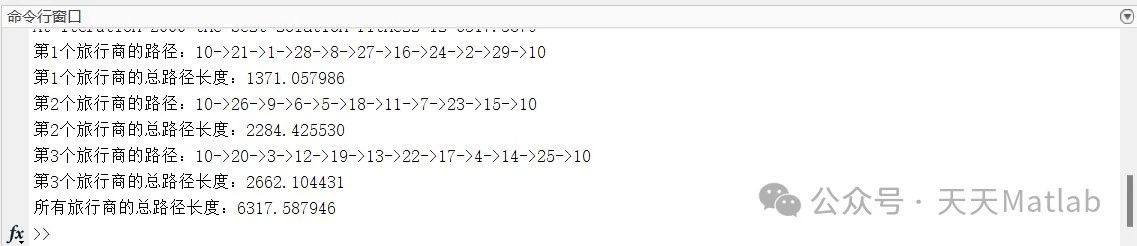
实验结果表明,基于天鹰算法AO求解MTSP的算法能够得到较好的解,并且收敛速度快。
5. 结论
基于天鹰算法AO求解MTSP的算法是一种有效的方法,它能够得到较好的解,并且收敛速度快。该算法可以应用于各种规模的MTSP实例。
🔗 参考文献
[1]王彦鑫.物流借阅平台中旅行商问题的研究[D].电子科技大学[2024-01-29].















 582
582











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









