






多传感器融合定位:IMU内参模型及标定

一、 概述
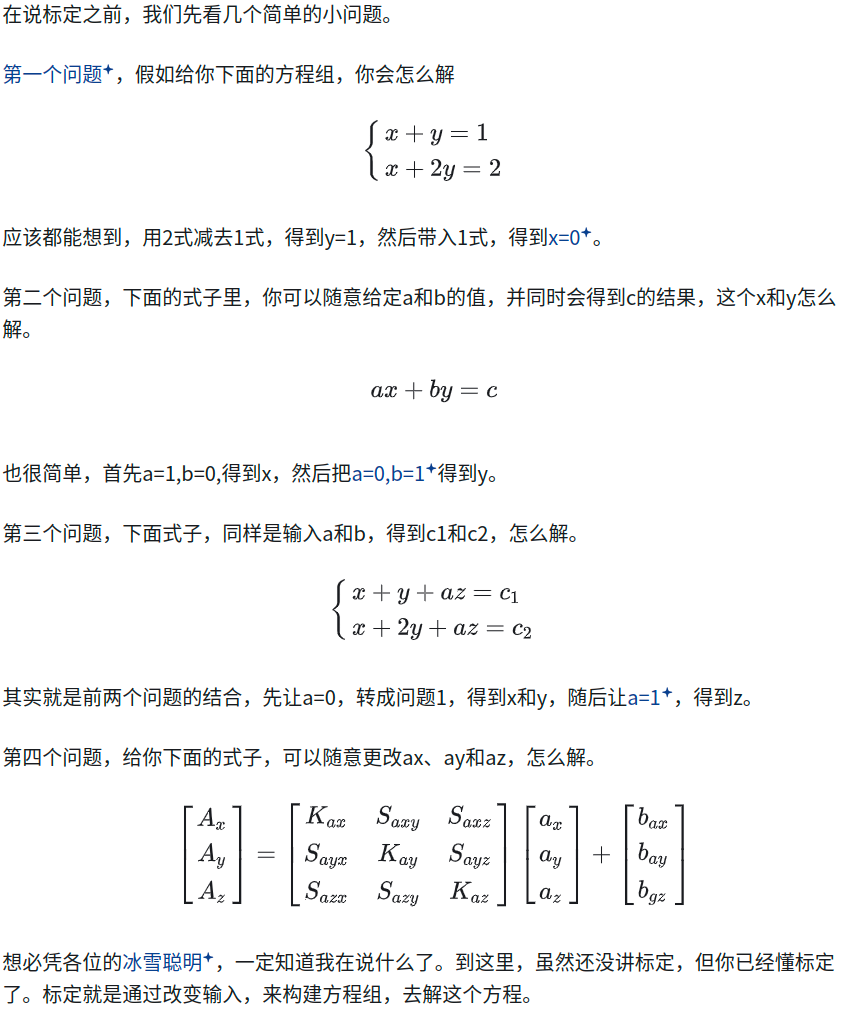
标定的本质是参数辨识。首先明确哪些参数可辨识,其次弄清怎样辨识。
参数包括陀螺仪和加速度计各自的零偏、标度因数、安装误差。
辨识就比较丰富了,如果让各位先不局限于标定任务,想一想你了解的辨识方法有哪些,常见的回答应该有这样几个:
1)解析法或最小二乘
2)滤波(kalman等)
3)梯度下降迭代优化
确实没错,标定里用的就是这些方法。这说明标定其实就是一个普通的参数辨识问题,它和你遇到的其他参数辨识任务比,并没有特殊在哪里。
本篇文章我们先分析标定的误差参数、误差模型,然后介绍两种标定方法,一种是基于转台的方法,使用解析法或最小二乘法进行参数辨识,另一种是不转台的方法,使用迭代优化的方法进行参数辨识。
基于滤波的方法我们并不打算讲,一是因为从参数辨识的精度讲,滤波和优化比,还是有比较大的劣势,另一个是我过去所基础的基于滤波的标定,都是高精度惯性导航里面使用的,这类方法在自动驾驶或机器人里所用的这种精度的IMU上,并不能很好地work。当然,现在也有一些基于kalman的slam系统里在标内参,那就是另外一个事情了,在这里我们不做讨论。
二、标定参数分析
1.参数项
1) 零偏
这个比较好理解,就是输出比输入多了一个常值误差。
需要注意的是,我们之前通过Allan方差分析,得到了器件的量化噪声、角度随机游走、角速率随机游走、零偏不稳定性噪声、速率斜坡,仔细看,这些都是对零偏质量的分析,也可以直观的理解为零偏的波动和漂移程度,这里面并没有分析零偏本身的大小,而这个才是我们标定里要去估计的那个常值误差。
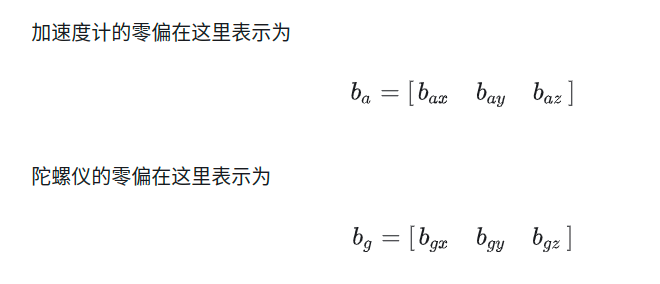
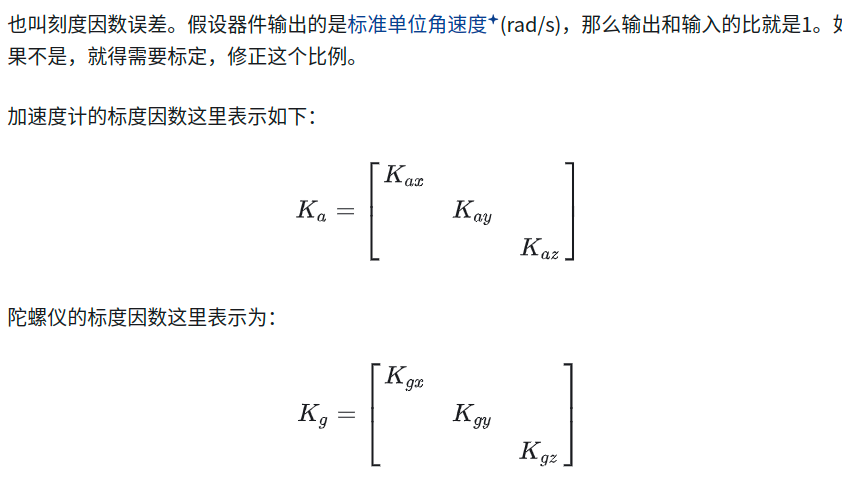
2) 标度因数误差
3) 安装误差
一图胜千言,上图吧。

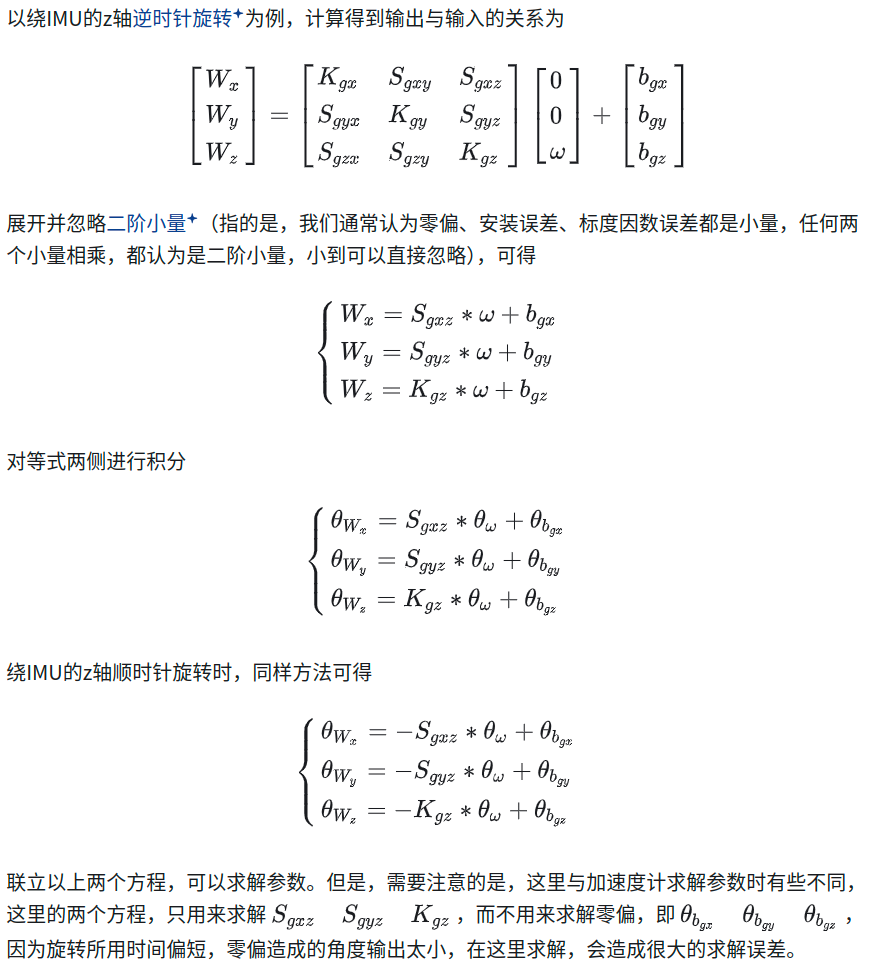
这里面b坐标系是正交的imu坐标系,g坐标系的三个轴是分别对应三个陀螺仪。由于加工工艺原因,陀螺仪的三个轴并不正交,和我们导航中使用的正交轴不重合。我们需要仔细想一想,这个安装误差怎么在陀螺输出中体现出来的,因为我们标定时只能采集到陀螺的输出,而无法直接去测量安装误差。理论上,在陀螺坐标轴和b系重合的情况下,我们沿b系某一个坐标轴旋转,那么其他两个轴是不会有角速度输出的,而有了安装误差以后,便有了输出,据此,我们就可以建立输出和误差之间的关系了。以图中一项误差为例,Sgxy表示的就是y轴的单位输入,在x陀螺上由安装误差造成的输出。由此,我们可以把所有的安装误差都成矩阵形式,即:
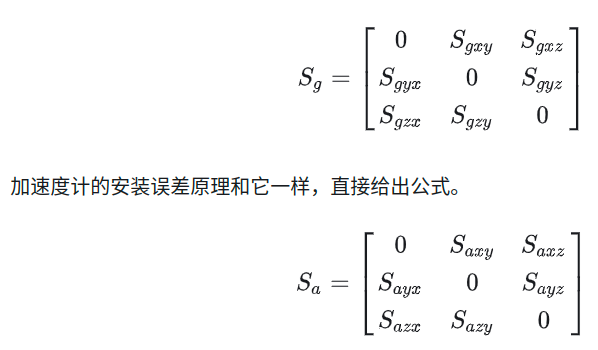
这样一共有12项安装误差参数。有的时候,可以简化为9项,具体什么情况下简化,以及怎样简化,我们会在本文的后面讲。
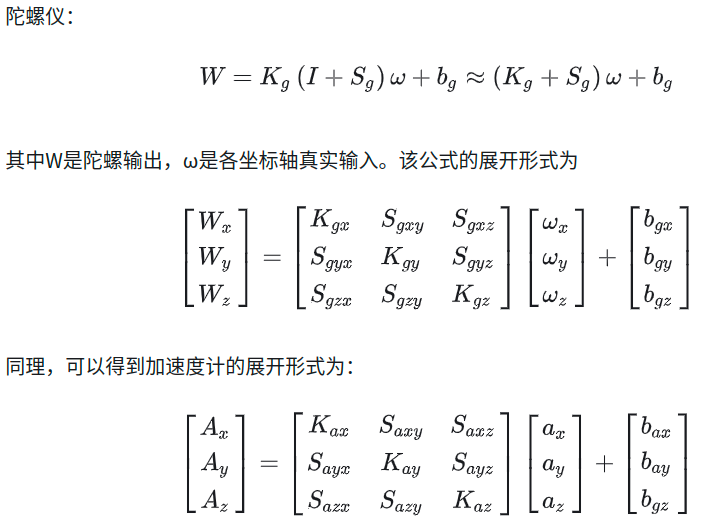
2. 误差模型
通过上面的参数分析,我们已经可以很容易地写出误差模型了。
三、标定方法
1. 基于转台的标定
1.1 标定原理
1.2 参数辨识方法
其实标定的过程就是在不停构建方程的过程,这里构建方程使用的就是转台(如下图)。

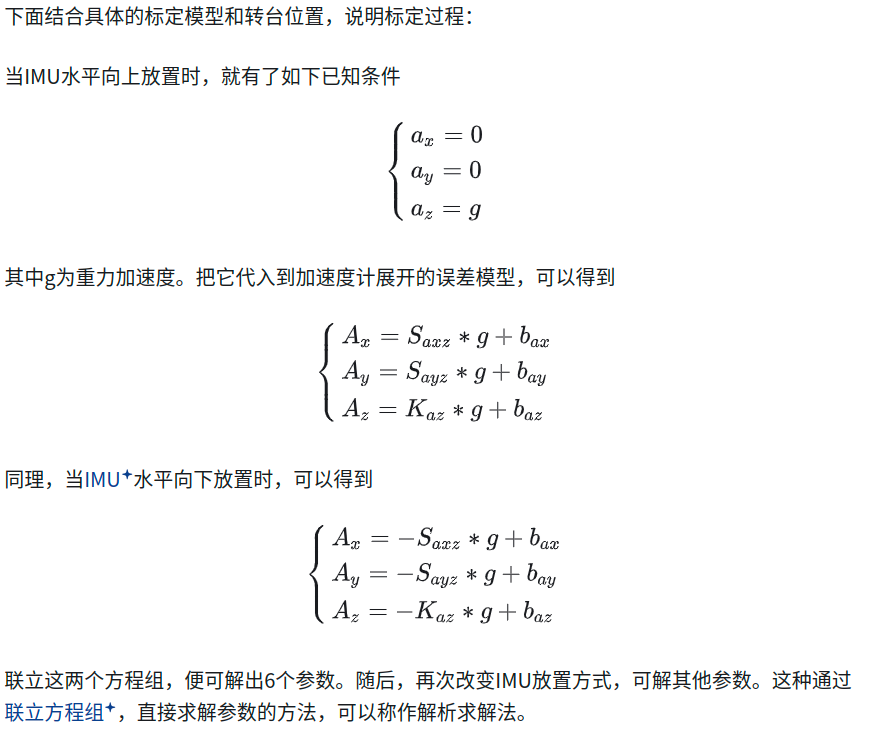
1) 加速度计内参标定
当IMU固定在转台上以后,通过翻滚转台框架,停在不同的位置(所谓不同位置,指的是转台的内外框架处在不同的角度时,IMU的姿态不一样,下图给出的是一个十二位置的标定方案示意图),就可以得到不同的加速度输入(IMU姿态不同,重力在IMU上的投影不同),从而构建方程组,去求解加速度计的内参。

a. 解析法
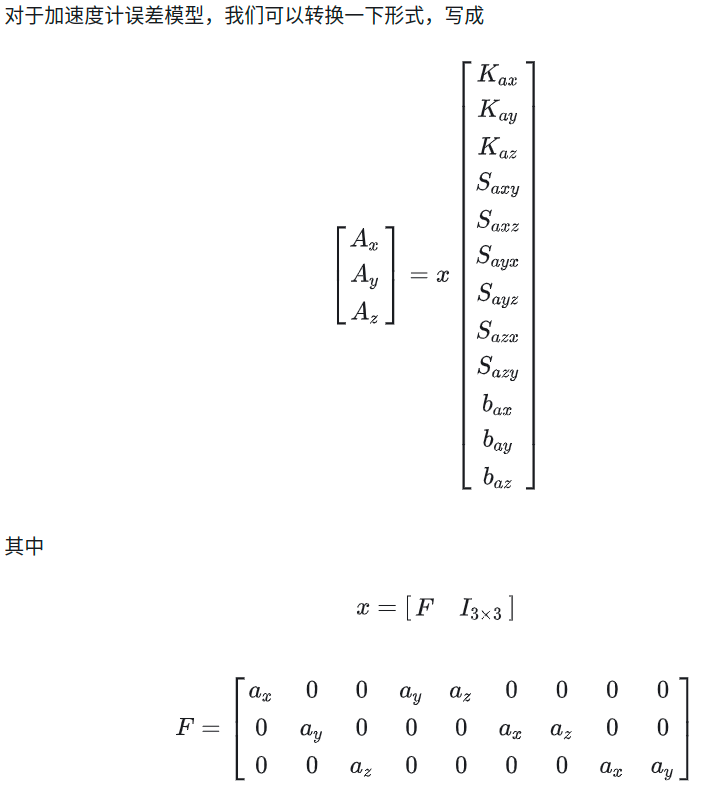
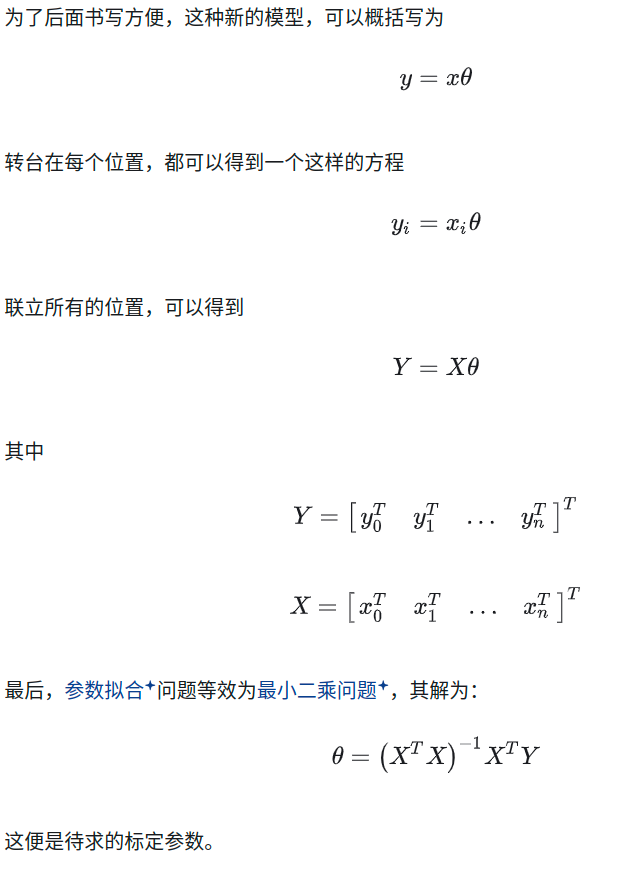
b. 最小二乘法
由于实际标定过程中,在一个位置采集得到的数据会有噪声,并且由于转台控制误差的存在,仅依靠联立两个位置去求解参数的方法精度有限,因此想通过联立更多位置去求解,这就是最小二乘法的目的。
c. 讨论
通过以上两种标定方法的介绍,可以看出,这里默认前提是转台是经过调平的,所谓调平,指的是转台水平面与地球水平面之间是平行的。调平的目的是,直接得到重力在IMU上的投影(各位可以很容易地想到,若两个水平面不平行,当IMU水平向上放置时,三个加速度计的输入就不是0,0,g了)。调平的方法也比较简单,使用水平仪做基准,去调整转台即可。当然,不依赖调平的方法也有,而且很普遍,只是方法复杂一些,我们在这里不做介绍,相信从此处讲的一个简单方法入手,再去查此类文献,你会很快弄懂那些相对高级的方法。
2) 陀螺仪内参标定
其实,明白了加速度计的内参标定方法以后,陀螺仪的内参标定方法就很容易想到了。让转台提供真实输入,通过改变真实输入,得到不同的方程组,最后用解析法或者最小二乘法去辨识参数。
这里需要说明的一点是,陀螺仪的输入是角速度,但是转台一般角速度不如角度精度高,因此不是直接以角速度作为真值,而是以积分得到的角度作为真值。
a. 解析法
为了求解零偏,需要使用另外一种方法,即,当转台静止时,可以简单认为陀螺仪输出只有零偏,用公式表示为
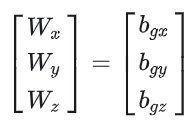
在静止状态下,采集一段时间内的数据,取平均值,即可得到零偏。
b. 最小二乘法
对于最小二乘法,经过加速度计中解析法和最小二乘法之间联系的了解,相信各位已经明白在陀螺仪标定中该怎么用这种方法了,此处就不啰嗦了。
c. 讨论
在这里,我们并没有考虑地球自转角速度(简称地速),它的大小约为15°/h,当我们要标定的陀螺仪的精度小于这个水平很多的时候,那么不考虑也无所谓,反之,就必须考虑了。一个比较简单的方法是,找到转台坐标系与地球坐标系之间的转换关系,这样,当转台处在任意一个位置的时候,地速在IMU上的投影都是已知的,在输入和输出中直接剪掉它的影响即可,这种方法叫转台对准。
各位可以理解一下转台对准和转台调平之间得联系。调平是为了找到IMU和重力之间得联系,对准是为了找到IMU和地速之间得联系,而重力和地速都是地理系下天然存在的输入。因此,可以概括为,调平和对准都是为了找到转台和地理系之间得转换关系。
但是,对准并不像调平那么简单,调平使用一个水平仪即可,而对准往往需要借助全站仪来操作,流程很复杂。实际上,陀螺仪的标定方法中,也有可以通过联立更多位置,把未知的地速投影直接抵消掉的方法,这样就不需要转台对准了。与加速度计标定的讲解思路类似,此处只是借助讲解简单情况下的方法,让大家理解原理和过程,至于这些相对高级的方法,仍然希望大家通过阅读文献去自己扩展。
2. 不依赖转台的标定
1.1 标定思路
基于转台的标定方法简单、精度高,但是有一个最大的缺点,就是这个方法太贵了。对于一些低精度的IMU,本身精度不高,那么也就不需要使用这么高精度的标定方法,因此,如果能为这种需求去寻找一些不依赖转台的标定方法,那就再好不过了。
再进一步想下去,好是好,可是怎么实现呢。标定的前提是要有真值,因为我们测量到的是IMU的输入,输入和真值之间的差异是由内参误差引起的,有了真值才能有内参的辨识。自然界天然的真值输入是重力加速度,但是,借助转台的时候,才能知道重力在IMU上的投影是多少,而我们此处想找的是不依赖转台的方法,那怎么搞?其实,不防换一种思路,寻找输入和真值之间得差异,一定需要知道重力在IMU每个轴上的投影是多少吗?当没有内参误差的时候,加速度计三个轴的矢量和必然和重力矢量大小相等,反之,则不等,这不也是找到二者的差异了吗,并且和内参误差建立了联系。
当然,这些只是用文字描述的思路,具体到实现上,还得用数学模型表示。
以下的标定思路、流程是来自于论文:A Robust and Easy to Implement Method for IMU Calibration without External Equipments
并且该文章有对应的开源代码:https://github.com/Kyle-ak/imu_tk
由于符号以及内参模型上有一些差异,因此本文与该论文在表达与公式上会有一些差异,但并不矛盾。
1.2 内参模型
内参模型不是讲过了吗,为什么还要再讲一次?这就又得费一点口舌了,理解起来可能要费点劲,我希望能讲得明白一些。
回顾基于转台的标定方法,我们定义了12项安装误差,他们表示的是加速度计、陀螺仪的各个敏感轴与IMU的坐标轴(即直角坐标系b系)之间的关系,那这里有一个疑问,b系是怎么来的?或者说,为什么把它规定在现在这个方向,而不是别的方向?此处的意思是指,如果我把一个和现在的b系非常接近,只差0.1°的一个直角坐标系规定为新的b系,有问题吗?好像没什么问题。也就是说b系是可以人为规定的。
在基于转台的标定方法里,IMU的b系其实默认被规定成了和转台的坐标系重合,因为这样转台的输入,才真的是IMU的输入,上面的各种基于转台标定的模型和方法才成立。
而当标定方法脱离转台时,这种约束关系就不存在了,而b系又是可以认为规定的,那么就有一种规定方法,可以简化内参模型。


则此时,加速度计的安装误差只剩下三个参数
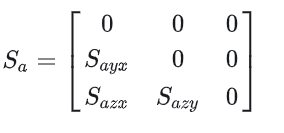
另外,当满足这种关系时,b系就已经完全固定了,因此此时陀螺仪的三个轴和b系之间的安装误差仍为 6 个。
1.3 标定方法
1)加速度计标定
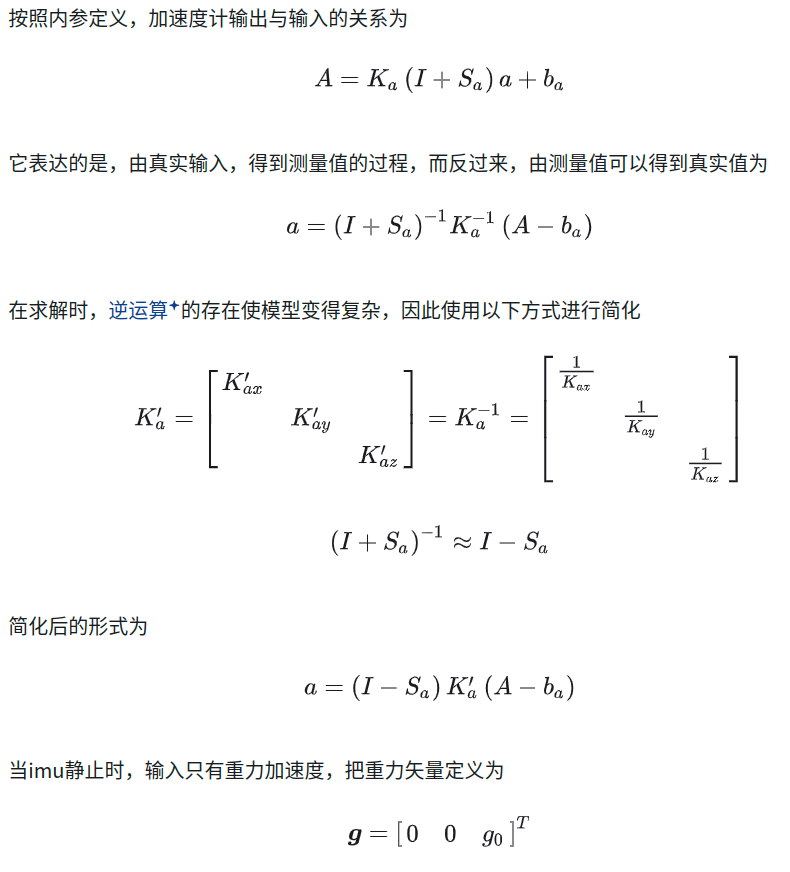
按照前述思路,我们需要建立测量的加速度矢量与重力加速度矢量之间的误差,并以此误差为基础,反推出内参模型中的参数。

在这样的旋转方案下,论文种给出的具体流程如下图

2)陀螺仪标定















 3711
3711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









