






四轮独立驱动电动汽车转矩分配控制
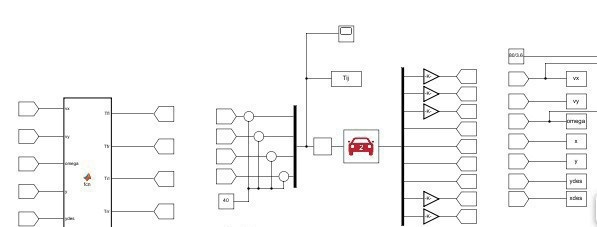
CarSim与Simulink联合
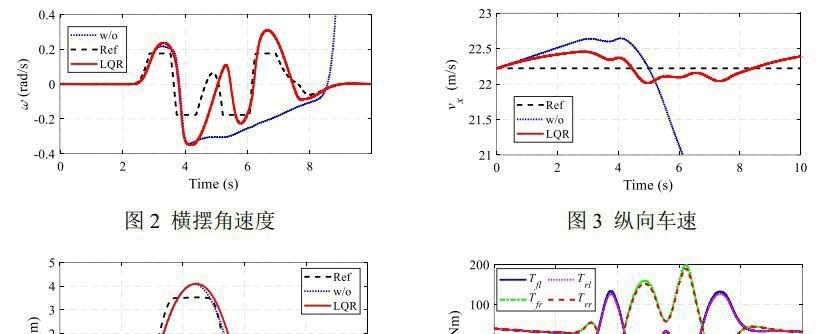
三自由度车辆模型(纵向、横向、横摆)
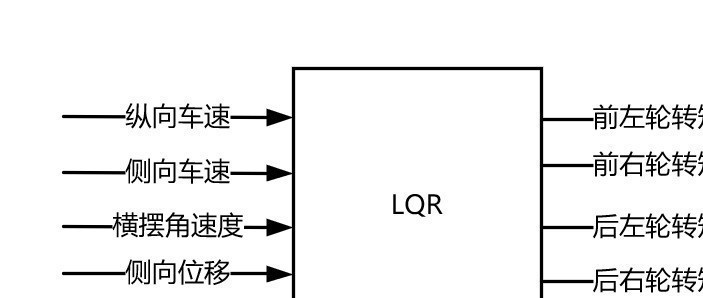
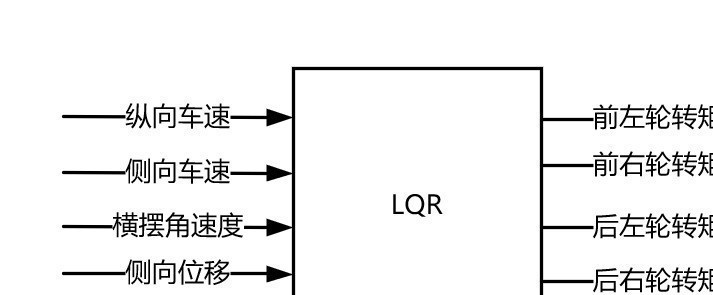
控制方法为离散LQR(包括连续系统的离散方法和求解方法)
带有完整详细的控制器、二自由度稳定性控制目标推导文档,不带
MATLAB版本为2018b CarSim版本为2018
ID:5330693338903916
德福巷成熟的海苔
四轮独立驱动电动汽车转矩分配控制是现代汽车技术领域的热门研究方向之一。在传统的汽车驱动系统中,发动机通过传动装置分配驱动力到每个车轮,但在电动汽车中,每个车轮都有自己的电机,因此可以根据实时需求对每个车轮的转矩进行精确控制。这种转矩分配控制可以提高汽车的操控性、稳定性和安全性。
为了实现这种转矩分配控制,需要使用到CarSim和Simulink这两个强大的工具。CarSim是一款汽车仿真软件,可以模拟车辆在不同道路条件下的行驶状况。Simulink是MATLAB的一个扩展工具箱,用于建立和仿真动态系统模型。
在转矩分配控制中,首先需要建立一个三自由度车辆模型,包括纵向、横向和横摆三个方向的运动。通过对这个模型进行仿真,可以得到车辆在不同工况下的性能指标,如加速度、制动距离等。
接下来,可以使用离散线性二次调节器(LQR)进行控制。LQR是一种经典的控制方法,可以将系统状态与控制输入之间的关系表示为线性方程,通过求解这个方程可以得到最优的控制输入。在离散LQR中,需要将连续系统的状态方程离散化,并使用递推方法求解。
为了实现稳定性控制,可以引入二自由度控制器。这种控制器可以根据车辆的状态和目标进行调整,以保持车辆的稳定性。通过详细推导目标函数和调整方式,可以得到一个完整而详细的控制器。
最后,需要使用MATLAB 2018b和CarSim 2018来实现这个转矩分
相关的代码,程序地址如下:http://fansik.cn/693338903916.html
















 2310
2310

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









