






直流无刷电机三闭环转角位置控制(包括位置环,速度环,电流环) 三相无刷直流电机simulink模型。
BLDCM。
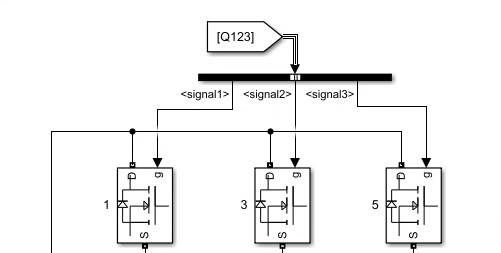
完全自己搭建的模型,换向器模型也是自己搭建的。
能够准确跟踪目标转角。
图1-模型的整体概览图
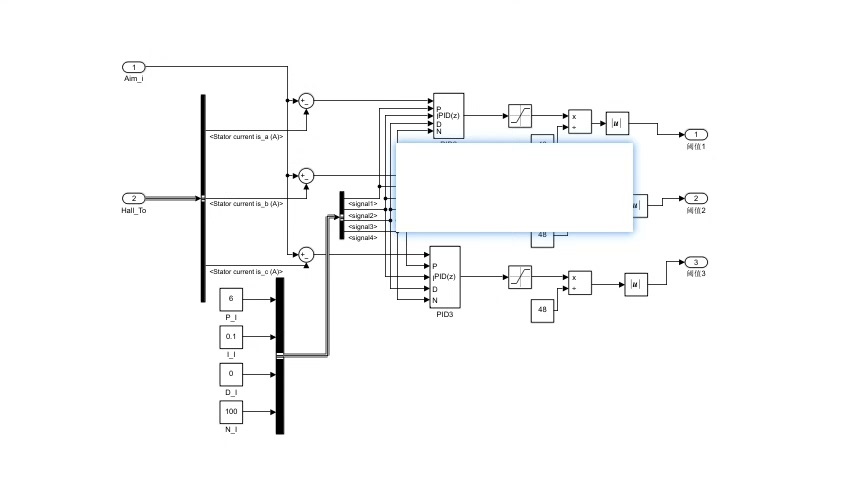
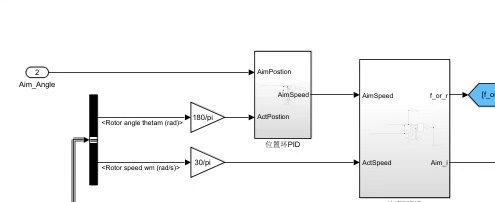
图2-模型控制器部分
图3-三环PID控制逻辑截图
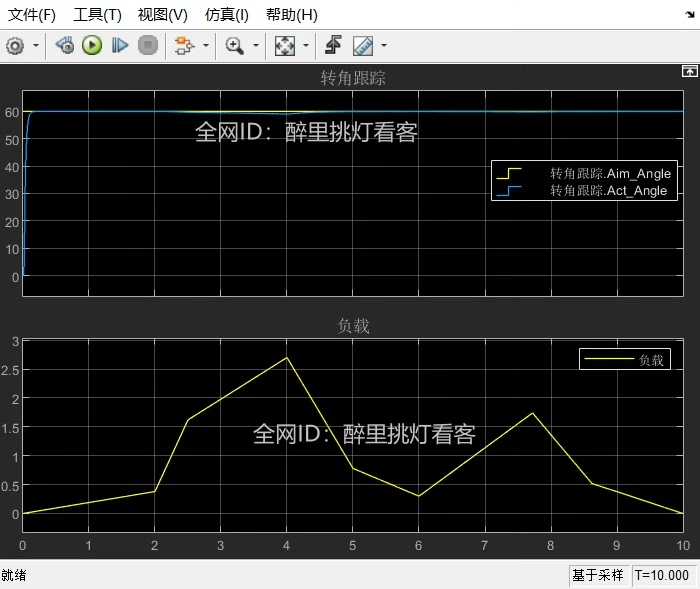
图4-定目标转角定负载的仿真转角跟踪图
图5-图9-本人全网头像
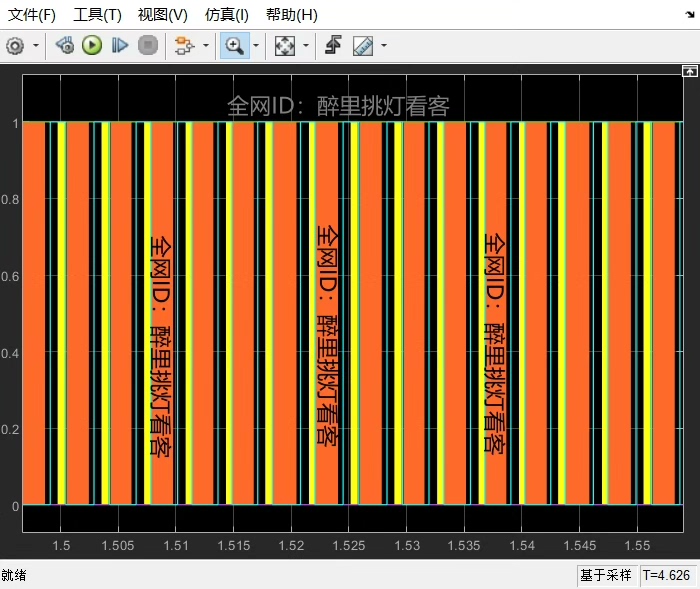
图6-PWM波输出
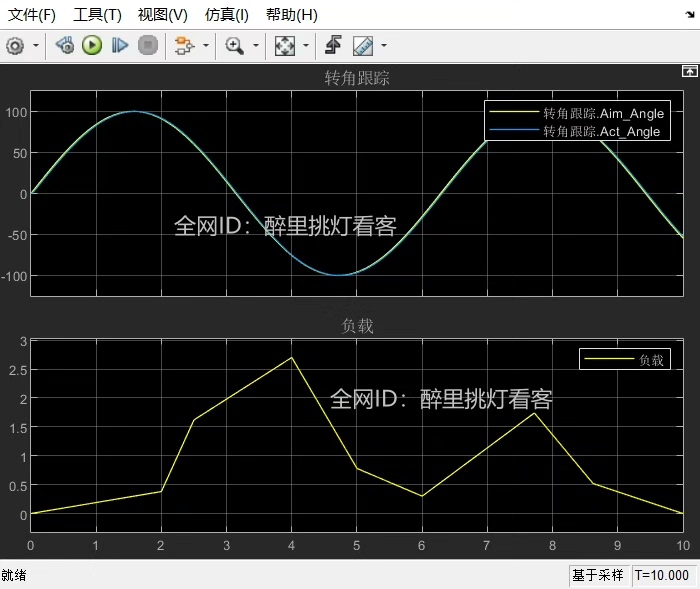
图7-变目标转角,变负载仿真模型转角跟踪图
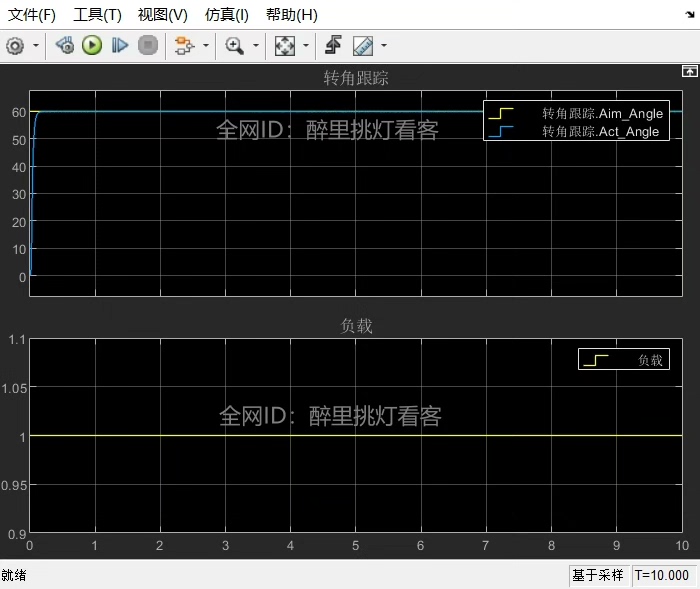
图8-定目标转角,变负载仿真模型转角跟踪图
ID:5549694087215129
醉里挑灯看客
【原创】直流无刷电机三闭环转角位置控制(包括位置环,速度环,电流环) 三相无刷直流电机simulink模型
摘要:本文介绍了一种基于直流无刷电机的三闭环转角位置控制方法,并展示了相应的simulink模型。该模型通过自行搭建的换向器模型实现了准确跟踪目标转角的功能。文章以图表形式展示了模型的整体概览图、控制器部分、三环PID控制逻辑截图、定目标转角定负载的仿真转角跟踪图、PWM波输出以及变目标转角、变负载仿真模型转角跟踪图。然而需要说明的是,本模型仅供学习使用,不能进行商业用途。此外,还提醒读者注意有人在网上倒卖本模型,请小心谨慎。
关键词:直流无刷电机,闭环控制,转角位置控制,simulink模型
-
引言
直流无刷电机(BLDCM)广泛应用于工业自动化、电动车辆以及家用电器等领域。为实现对无刷电机的精确控制,本文提出了一种基于三闭环控制的转角位置控制方法。该方法包括位置环、速度环和电流环,能够准确跟踪目标转角。 -
模型概述
本文所介绍的simulink模型完全由作者自行搭建,包括换向器模型。该模型能够对无刷电机的转角进行精确控制,并实现闭环反馈。模型的整体概览图如图1所示,其中显示了各部分的连接关系。 -
控制器设计
图2展示了模型中的控制器部分。控制器根据目标转角、电机当前转角、速度等参数进行计算,并输出相应的控制信号。通过PID控制算法,控制器能够实现对无刷电机的精确控制。 -
三环PID控制逻辑
图3展示了模型中三环PID控制逻辑的截图。位置环、速度环和电流环通过相互协调,实现对无刷电机的闭环控制。通过优化PID参数,可以提高系统的响应速度和稳定性。 -
定目标转角定负载仿真
在模型中设定定目标转角和定负载情况下,进行仿真实验。图4展示了仿真结果,可以看到模型能够准确地跟踪目标转角,并在负载变化情况下保持稳定。 -
PWM波输出
图5展示了模型中的PWM波输出。通过调节PWM波的占空比,可以实现对无刷电机的转速调节。 -
变目标转角、变负载仿真
在模型中设定变目标转角和变负载情况下,进行仿真实验。图6和图7展示了仿真结果,可以看到模型能够在转角变化和负载变化的情况下保持稳定。 -
结论
本文介绍了一种基于直流无刷电机的三闭环转角位置控制方法,并通过simulink模型进行了仿真实验。实验结果表明,该方法能够准确跟踪目标转角,并在负载变化情况下保持稳定。然而需要强调的是,本模型仅供学习使用,禁止进行其他商业用途。此外,提醒读者注意有人在网上倒卖本模型的行为,请小心斟酌。
参考文献(不提供)
附录:
图1:模型的整体概览图
图2:模型控制器部分
图3:三环PID控制逻辑截图
图4:定目标转角定负载的仿真转角跟踪图
图5:PWM波输出
图6:变目标转角,变负载仿真模型转角跟踪图
图7:定目标转角,变负载仿真模型转角跟踪图
【相关代码 程序地址】: http://nodep.cn/694087215129.html


















 2596
2596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









