







第二章 Nav2行为
Nav2使用行为树来控制导航行为。行为树用于建立导航到目标位置以及机器人无法导航的情况的标准。
本节解释Nav2如何使用行为树。
什么是行为树导航
nav2_bt_navigator是行为树的包
由以下部分组成:
1. bt_navigator节点和配置文件
2. bt_navigator节点的behavior
3. behavior_server节点和其配置文件
bt_navigator和behavior_server的连接方式使用行为树指定。本单元中学习如何创建此类行为并将其提供给导航系统。
bt_navigator节点
必须管理其他导航相关节点在行为树中的定义。
必须给bt_navigator创建一个行为,确定它如何移动机器人。
如何创建一个行为
要创建行为,请使用可用性为的节点类型创建XML文件。此XML文件提供给bt_behavior,以便在需要时执行。
behavior.xml例子
<!--
This Behavior Tree replans the global path periodically at 1 Hz, and it also has
recovery actions.
-->
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<PipelineSequence name="NavigateWithReplanning">
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="FollowPath"/>
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
</RecoveryNode>
</PipelineSequence>
<SequenceStar name="RecoveryActions">
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
</SequenceStar>
</RecoveryNode>
</BehaviorTree>
</root>可以等价为如下图
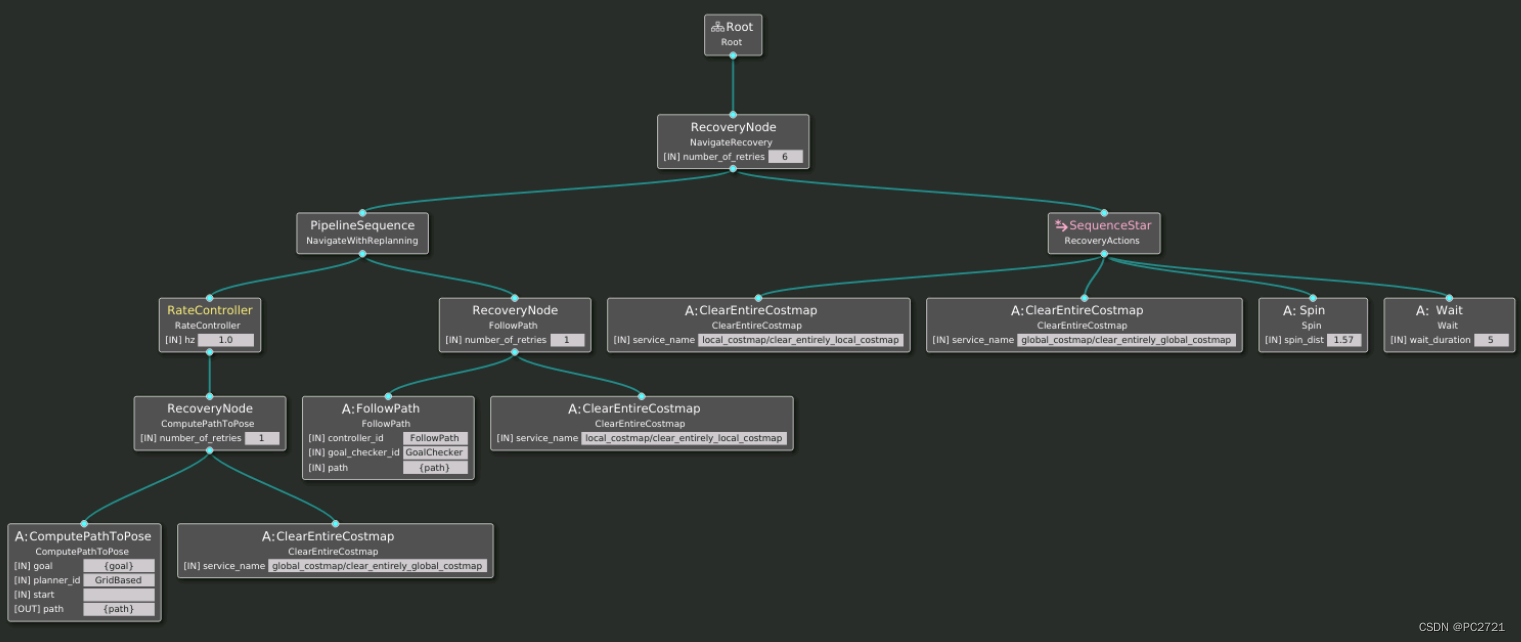
分析XML文件
对于每个行为,由以下tag开始
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
...
</BehaviorTree>
</root>root标记要执行的子树
behaviortree标签标记具有更定媒称的行为树 ID就是它的名字
接下来,在behavior标记中,按构建所需行为的顺序包含要使用的行为树节点。例如,对于导航课程的默认行为,你需要以下行为
每秒重新规划全局路径
跟随那个路径
如果机器人卡住,执行一下顺序
1.清除本地costmap
2. 清除全局costmap
3. 旋转以检查新的障碍物,再次构建costmap
4. 等待五秒,然后返回主要行为
看看它是如何在Nav2提供的行为节点实现的。
使用BT节点
RecoveryNode
此节点用于封装其他两个节点,并通过以下方式控制其激活
1.此节点将开始执行第一个子节点
2. 如果第一个子节点SUCCESS,那么节点返回SUCCESS
3. 如果第一个子节点failure,执行第二个子节点
4. 如果第二个子节点success,执行第一个子节点
5. 如果第二个子节点failure,那么返回failure并且结束
在导航中第一个子节点是导航任务,第二节点是recovery动作
在之前的XML文件中的例子
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<PipelineSequence name="NavigateWithReplanning">
...
</PipelineSequence>
<SequenceStar name="RecoveryActions">
...
</SequenceStar>
</RecoveryNode>节点叫做navigaterecovery
行为开始于启动pipelinesequence节点叫做navigateweithreplanning
如果上个节点fail,会开始sequencestar节点叫做recoveryactions
分别是第一子节点和第二子节点
不过会尝试6次,仍然失败才会退出任务
注意:请记住,行为节点可以有输入端口(相当于传递给节点的参数)和输出端口(等同于节点返回的结果)。例如,RecoveryNode有一个名为number_of_retrys的输入端口(该名称是默认情况下每个节点都存在的另一个输入端口)。检查每个节点的文档,查看其输入输出端口列表。
pipelinesequence
此节点将按以下方式激活子节点:
第一个节点激活第一个子节点,直到它返回SUCCESS。
这将激活第一和第二个子节点(再次),直到第二个返回SUCCESS。
然后它(再次)激活第一、第二和第三个子节点,直到第三个节点返回SUCCESS,依此类推。
如果任何子节点返回FAILURE或最后一个子模块返回SUCCESS,它将停止。
请参见上一个XML文件中的示例:
<PipelineSequence name="NavigateWithReplanning">
<RateController hz="1.0">
...
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
...
</RecoveryNode>
</PipelineSequence>这里,该节点用于每秒计算全局路径,然后使机器人遵循新计算的路径。
这有助于考虑机器人当前位置的修改,以使全局路径适应这些修改。
此节点名为NavigateWithReplanning,有两个子节点
第一个是RateController节点(检查其含义)。该节点包括目标路径的计算。
第二个是RecoveryNode节点。这一个用于使机器人遵循计算出的路径。
Ratecontroller
此节点将以指定为参数的特定频率调用后续节点。 上一个XML文件的示例:
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
...
</RecoveryNode>
</RateController>在这种情况下,RateController将以1 Hz的频率调用RecoveryNode。
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>有两个子节点
一个是computepathtopose
一个是clearentirecostmap
ComputePathToPose
调用nav2_planner ROS2节点(planner服务器)提供的ComputePathToPose ROS2动作服务器,以计算目标的路径。通过使用黑板的变量(名为{goal}的变量)将目标引入节点。然后,在另一个名为{path}的黑板变量中引入规划器的结果。
什么是黑板 blackboard
黑板就像一个所有节点都可以访问的变量空间。它用于在节点之间共享信息。一个节点可以在那里放置一个值,另一个节点也可以读取它。在我们的ROS2行为树课程中了解更多信息。
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>在这种情况下,有人将{目标}变量的值放在黑板上,节点用计算出的路径填充{路径}黑板变量。目标和planner_id是节点的输入端口,路径是其输出端口。
clearentirecostmap
调用清除Costmap的服务。您必须指明要调用哪个服务器来清除本地或全局Costmap。 上一个XML文件的示例:
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>sequence star
工作方式与PipelineSequence节点相同,但不会激活已完成SUCCESS的节点。 上一个XML文件的示例:
<SequenceStar name="RecoveryActions">
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
</SequenceStar>followpath
调用控制器中的动作服务器,该服务器将向机器人的轮子发送命令,以遵循计算出的路径。 上一个XML文件的示例:
<FollowPath path="{path}" controller_id="FollowPath"/>spin
调用nav2_recoveries ROS节点提供的自旋ROS2动作服务器。该服务器将使机器人按spin_dist参数中指示的度数旋转到位。 上一个XML文件的示例:
<Spin spin_dist="1.57"/>wait
调用nav2_recovers ROS节点提供的等待ROS2动作服务器。它将使行为等待指定的秒数。 上一个XML文件的示例:
<Wait wait_duration="5"/>结论
还有很多其他节点可以用于您的行为。查看此处查看Nav2节点的官方列表,以了解有关节点的更多信息以及如何配置它们。 此外,如果您需要大量处理行为,您应该了解更多关于行为树的一般信息,以及BehaviorTree.CPP实现库。
如何向bt_behavior提供行为
在启动节点期间,必须为bt_navigation节点指定两项内容:
带有节点配置的btnavigator.yaml文件。
behavior.xml文件。
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_nav_to_pose_bt_xml: "/home/user/ros2_ws/src/path_planner_server/config/behavior.xml"
default_server_timeout: 20
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node在参数下,pluging_lib_names指定XML行为文件所需的行为节点列表。
记住在此参数中添加所需的值。
可在此处找到可用节点插件的完整列表 检查您在路径规划单元中创建的代码,它在其中执行配置文件的加载:
bt_navigator_yaml = os.path.join(get_package_share_directory('path_planner_server'), 'config', 'bt_navigator.yaml')
...
Node(
package='nav2_bt_navigator',
executable='bt_navigator',
name='bt_navigator',
output='screen',
parameters=[bt_navigator_yaml])练习2.1
创建一个名为abort_withn_low_battery.xml的新行为文件,该文件执行以下行为:
每当提供新的目标目的地时,机器人就会前往该目标。
如果电池在任何时候低于25%,则中止当前目标。
调用电池主题/电池。发布该主题的100%电池状态。
在某一时刻,将该主题的发布值更改为20%。机器人必须改变其行为,并在那时放弃其目标。
注释
使用behavior.xml作为模板并相应地修改它。
有一个Nav2行为节点用于电池状态检测:IsBatteryLow。查看官方文档,了解如何在代码中使用它。
由于IsBatteryLow节点在电池电量正常时返回FALSE(因为它正在检查IsBattery Low),因此您需要使用名为<Inverter>的BT节点来否定该检查。 要在电池主题中发布,请使用以下命令(根据所需测试):
ros2 topic pub /battery sensor_msgs/BatteryState '{voltage: 12.0, percentage: 1.0, power_supply_status: 3}' <!--
This Behavior Tree replans the global path periodically at 1 Hz, and it also has
recovery actions.
-->
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<PipelineSequence name="NavigateWithReplanning">
<Inverter>
<IsBatteryLow battery_topic="/battery" is_voltage="false" min_battery="0.25" />
</Inverter>
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="FollowPath"/>
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
</RecoveryNode>
</PipelineSequence>
<SequenceStar name="RecoveryActions">
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
</SequenceStar>
</RecoveryNode>
</BehaviorTree>
</root>rosrun groot Groot可以将行为树可视化。
为Nav2配置Groot
打开Groot并选择编辑器模式 现在您需要将自定义Nav2节点加载到其中。
为此,选择“加载调色板”图标。
选择/opt/ros/humble/share/nav2_behavior_tree/nav2_tree_nodes.xml文件 新节点将显示在节点列表中
可视化现有行为
将behavior.xml文件加载到编辑器中,为此
点击loadtree图标
然后打开behavior.xml文件
可以看到行为树的可视化图形被打开了
修改现有行为
通过添加检查电池状态的节点来修改加载的行为。为此,请执行以下步骤
在节点调色板中选择逆变器节点。将其拖放到行为桌面上。
在节点调色板中选择IsBatteryLow节点。将其拖放到行为桌面上。
将逆变器节点连接到名为NavigateWithReplanning的PipelineSequence节点。将它移到最左边,这样它将是它将启动的第一个子节点
现在将逆变器节点连接到IsBatteryLow节点。 你应该有这样的东西:
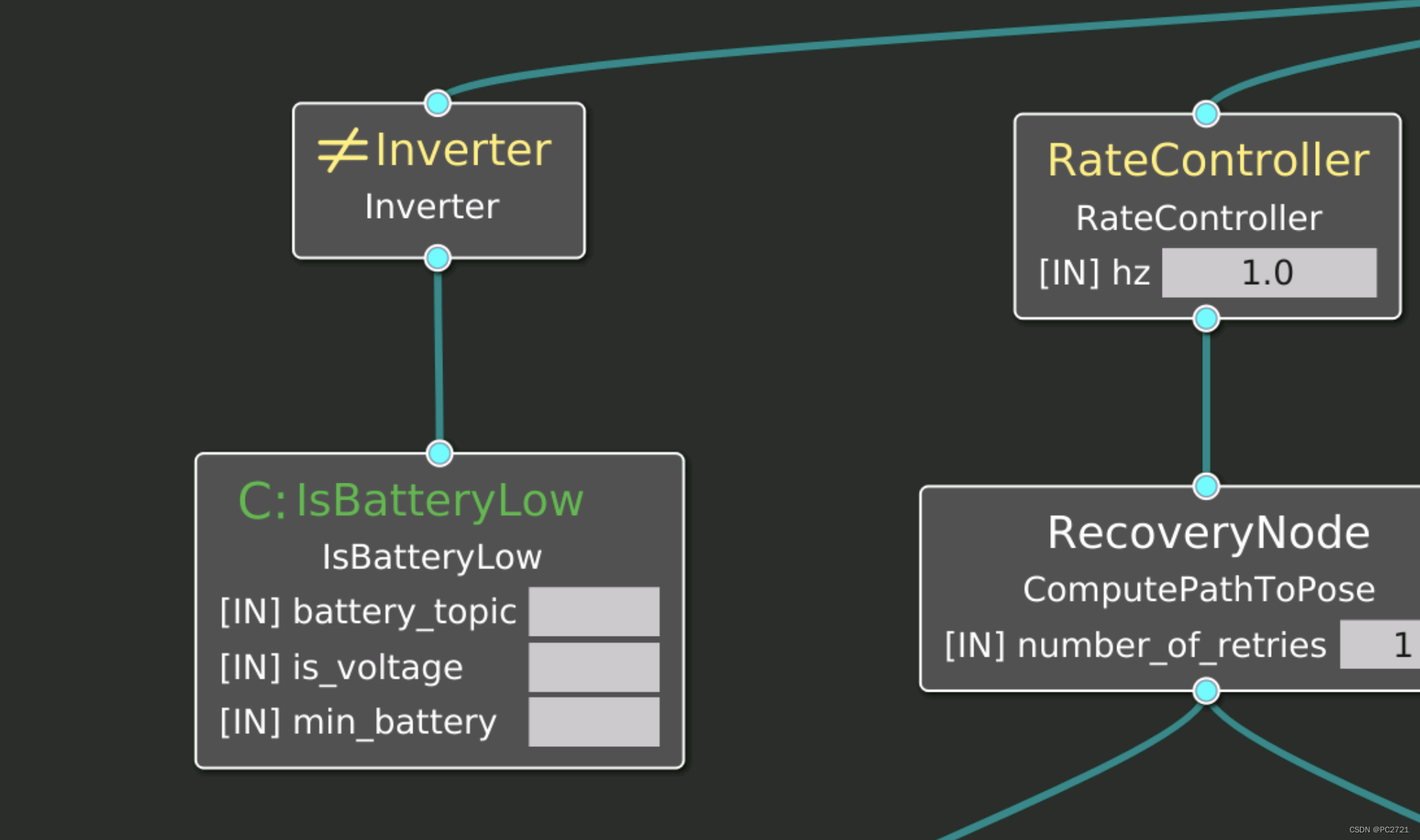
从上到下填入 /battery false 0.25
将其另存为abort_win_low_battery_2.xml。
修改导航启动文件,使其加载新的行为文件。
在另一个终端上,将100%的值发布到/battery主题中。
ros2 topic pub /battery sensor_msgs/BatteryState '{voltage: 12.0, percentage: 1.0, power_supply_status: 3}' 定位机器人并向其发送导航目标。 现在将/beactery主题中发布的值更改为20%。机器人应该放弃它的路径。
Recovery Behaviors
当机器人卡住时,Nav2恢复行为会自动激活,以尝试恢复
当controller_server的配置文件中指定的一个检查程序发出机器人未达到目标的信号时,bt_navigator将激活恢复行为:
controller_server检测机器人卡住的情况,并通知bt_navigator。
如其配置文件所示,bt_navigator调用recovery_server以激活恢复插件。
您在recoveries_server配置文件Recovery.yaml中配置了恢复行为。
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2目前,nav2_recovers包提供了三个可用插件:
旋转:当Costmap更新时,它将在原地执行旋转。当机器人看到周围的Costmap充满障碍物(现实中可能存在或不存在)时,这很有用。这种行为将有助于确定目前存在的障碍,从而增加找到通往目标的新道路的机会
备份:执行机器人在一定距离内的线性运动。
等待:将机器人停止到位并等待一定时间。等待时间在操作请求中提供。
配置
一些参数与recovery_server本身相关,其他参数仅与插件相关。 recovery_server参数包括:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0所有插件都将在适用于所有插件的特定条件下运行。这些条件与速度限制和要使用的帧有关。
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2它们是如何工作的
每个插件都提供一个动作服务器,需要它的行为节点将调用它。
如果尚未启动,请启动导航系统,然后请求可用的操作服务器列表:
ros2 action list/backup
/compute_path_through_poses
/compute_path_to_pose
/follow_path
/move_robot_as
/navigate_through_poses
/navigate_to_pose
/spin
/wait如您所见,有/backup、/spin和/wait操作服务器可供调用。
当BT节点请求一个恢复行为时,BT导航器将调用恢复行为的动作服务器。如果controller_server由于目标缺乏进展而请求,BT导航器也会调用它们。















 1912
1912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









