





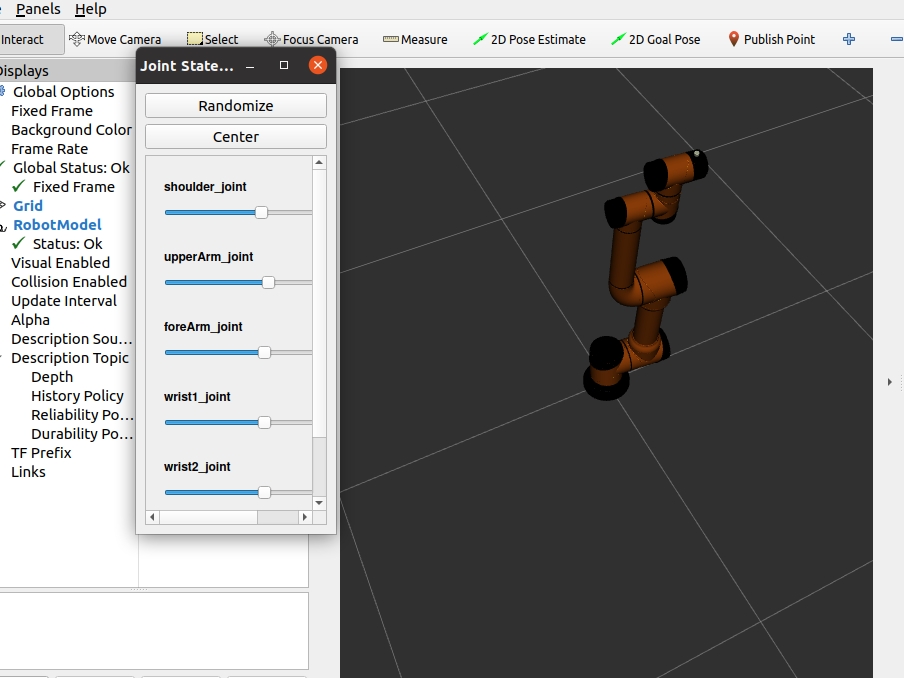
ROS2 Ubuntu18.04机器人系统,机器人仿真机械臂搭建
Ubuntu18.04
已经搭建好
Ros2 foxcy环境及所需命令语句,配套有gazebo11,rviz2,可以直接使用
配置了官网机械臂,压缩包文件,用VMware打开就能用
ID:5619650741744091
水星豁达
以上相关代码,程序地址:http://wekup.cn/650741744091.html

ROS2 Ubuntu18.04机器人系统,机器人仿真机械臂搭建
Ubuntu18.04
已经搭建好
Ros2 foxcy环境及所需命令语句,配套有gazebo11,rviz2,可以直接使用
配置了官网机械臂,压缩包文件,用VMware打开就能用
ID:5619650741744091
水星豁达
以上相关代码,程序地址:http://wekup.cn/650741744091.html
 4445
354
1740
5297
4445
354
1740
5297











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























