







文章目录
YOLOv11无人机视角船舶检测系统:项目概述与技术实现
项目背景
随着无人机技术的快速发展,无人机被广泛应用于海洋监测、港口管理、船舶跟踪和非法渔业活动侦测等领域。利用无人机视角获取的图像或视频数据对海上船舶进行实时检测和追踪,能够极大提高效率和准确性。然而,海洋场景复杂多变,船舶目标往往受到海浪、天气、光照和角度等多种因素的影响,因此需要一种高精度、高鲁棒性的目标检测算法。
YOLO(You Only Look Once)系列算法以其轻量化、高效率的特性成为目标检测领域的热门选择。YOLOv11 作为最新一代的目标检测算法,融合了更强大的特征提取能力、快速推理能力和更高的检测精度,为无人机视角下的船舶检测提供了理想的技术支持。

项目简介
本项目基于最新版本的 YOLOv11 模型,专注于解决无人机视角下海上船舶目标检测的需求。通过优化的模型结构和训练策略,本系统能够在复杂的海洋环境中快速、准确地检测出无人机摄像头所捕捉到的船舶目标。
核心目标
-
实时船舶检测:
- 在无人机实时拍摄的图像和视频流中高效检测船舶目标。
- 能够适应复杂海洋场景,如波浪反光、光照变化和远距离目标。
-
高精度目标识别:
- 支持检测不同类型的船舶(如渔船、货船、游艇等)。
- 在小目标检测和遮挡情况下保持较高的精度。
-
轻量化推理:
- 模型能够在边缘设备(如无人机机载硬件)上高效运行,支持实时处理。
-
支持多种输入源:
- 支持无人机实时视频流(RTSP/UDP)、静态视频文件以及无人机拍摄的图片。

YOLOv11 的技术优势
1. 更强的特征提取能力
YOLOv11 引入了更深的特征网络结构,并采用了动态卷积和自适应注意力机制(Adaptive Attention Mechanism),显著增强了对小目标和遮挡目标的识别能力。对于无人机拍摄的远距离船舶目标,YOLOv11 能够捕捉更多细节特征,确保检测精度。
2. 改进的多尺度检测
YOLOv11 的多尺度检测头进一步优化,支持检测不同大小的目标。从无人机高空视角拍摄的场景中,大型货船和小型渔船可能同时出现在画面中,多尺度检测机制确保所有目标都能被正确识别。
3. 轻量化设计
YOLOv11 针对边缘计算设备进行了深度优化,减少了模型参数量和计算复杂度。即使在资源受限的无人机嵌入式硬件中,YOLOv11 依然能够以较低延迟运行。
4. 实时处理能力
YOLOv11 在推理速度上大幅提升,支持超过 120 FPS 的实时检测速度。对于无人机传输的高帧率视频流,能够实现实时处理,确保船舶目标的连续检测与跟踪。
数据准备与模型训练
1. 数据集构建
为提高模型在无人机视角下的船舶检测性能,本项目采用以下步骤准备训练数据:
- 数据来源:
- 开源的船舶检测数据集(如 SeaShips 数据集)。
- 无人机实拍的海洋场景图片和视频。
- 数据标注:
- 使用专业的标注工具(如 LabelImg)对船舶目标进行手动标注。
- 每张图像标注船舶的边界框(Bounding Box)及其类别标签(如渔船、货船等)。
- 数据增强:
- 添加光照变化、旋转、裁剪、模糊等增强操作,以提升模型对不同海洋场景的适应能力。
2. 模型训练
- 训练平台:使用 NVIDIA A100 GPU 集群进行模型训练。
- 预训练权重:使用 COCO 数据集上训练好的 YOLOv11 模型作为初始权重,缩短训练时间。
- 超参数设置:
- 学习率:0.001
- Batch size:16
- 优化器:AdamW
- Epochs:100
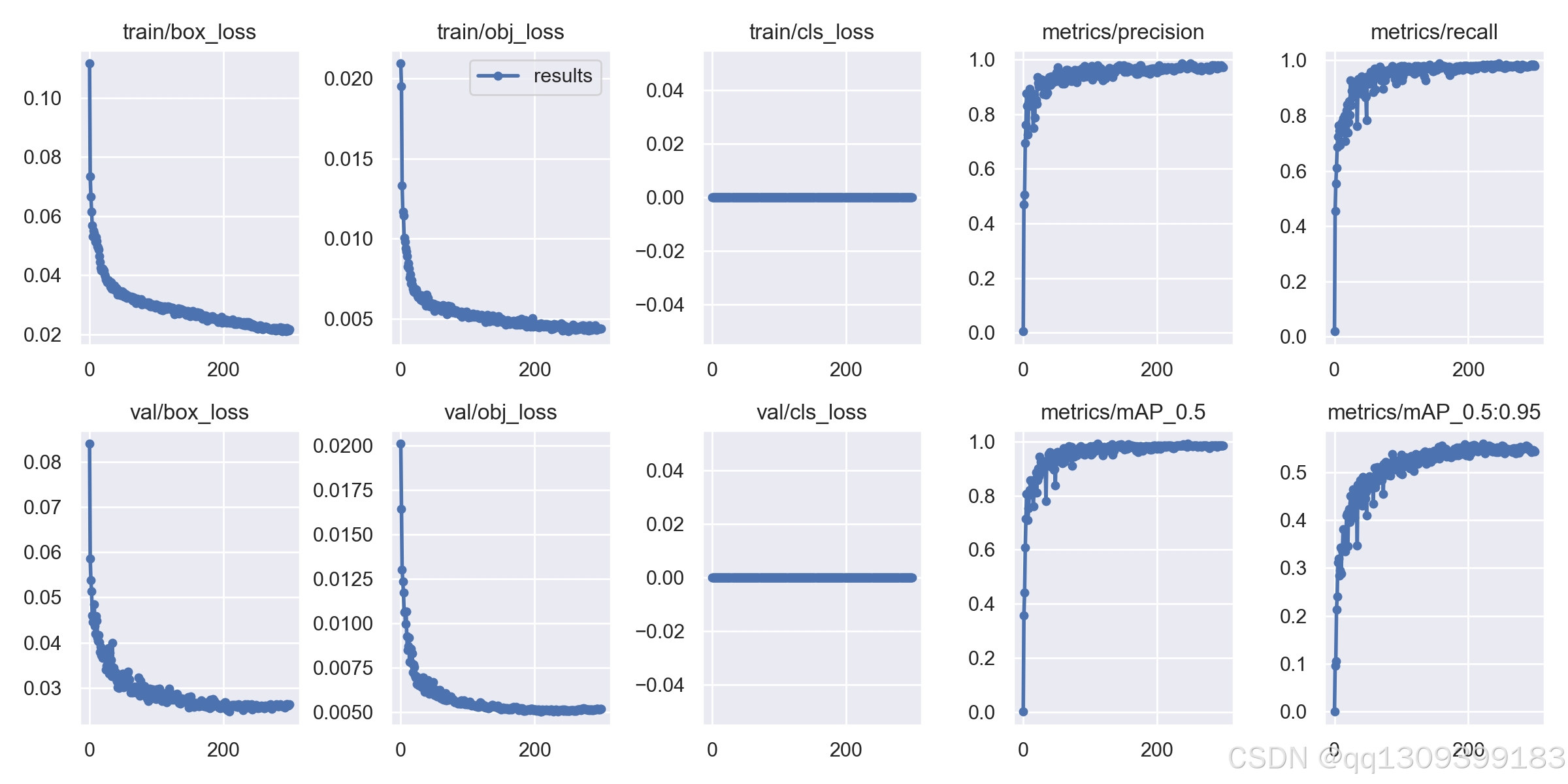
- 训练过程:
- 模型在训练集中学习船舶目标的特征,并在验证集中评估性能。
- 使用 F1-score、mAP(mean Average Precision)等指标对模型进行评
系统功能与使用方法
1. 实时目标检测
无人机实时拍摄的视频流通过 RTSP 或 UDP 协议传输至本地服务器,系统实时接收并运行目标检测算法,将检测结果(如边界框和类别标签)叠加到视频帧上并返回给用户。
2. 静态图片检测
用户可上传无人机拍摄的静态图片,系统对图片中的船舶目标进行检测,并生成带有检测结果的图片。
3. 视频文件处理
系统支持处理无人机录制的视频文件。用户上传视频后,系统逐帧检测船舶目标,并输出处理后的标注视频。
4. 多种目标类别支持
系统支持识别多种类型的船舶目标,并根据用户需求扩展检测类别。
安装与运行
环境依赖
- Python 版本:3.8+
- 主要依赖库:
- ultralytics(YOLOv11)
- OpenCV
- PyTorch
- NumPy
- Flask(Web 界面可选)
安装依赖项:
pip install opencv-python-headless torch numpy flask
下载 YOLOv11 模型权重
从 [YOLO页面获取预训练的 YOLOv11 权重文件,并将其保存到项目的 weights 目录。
启动系统
-
运行实时检测:
python app.py --source rtsp://<your-drone-stream-url> -
检测静态图片或视频:
python detect.py --source <image_or_video_path> --weights weights/yolov11.pt
实验结果与性能分析
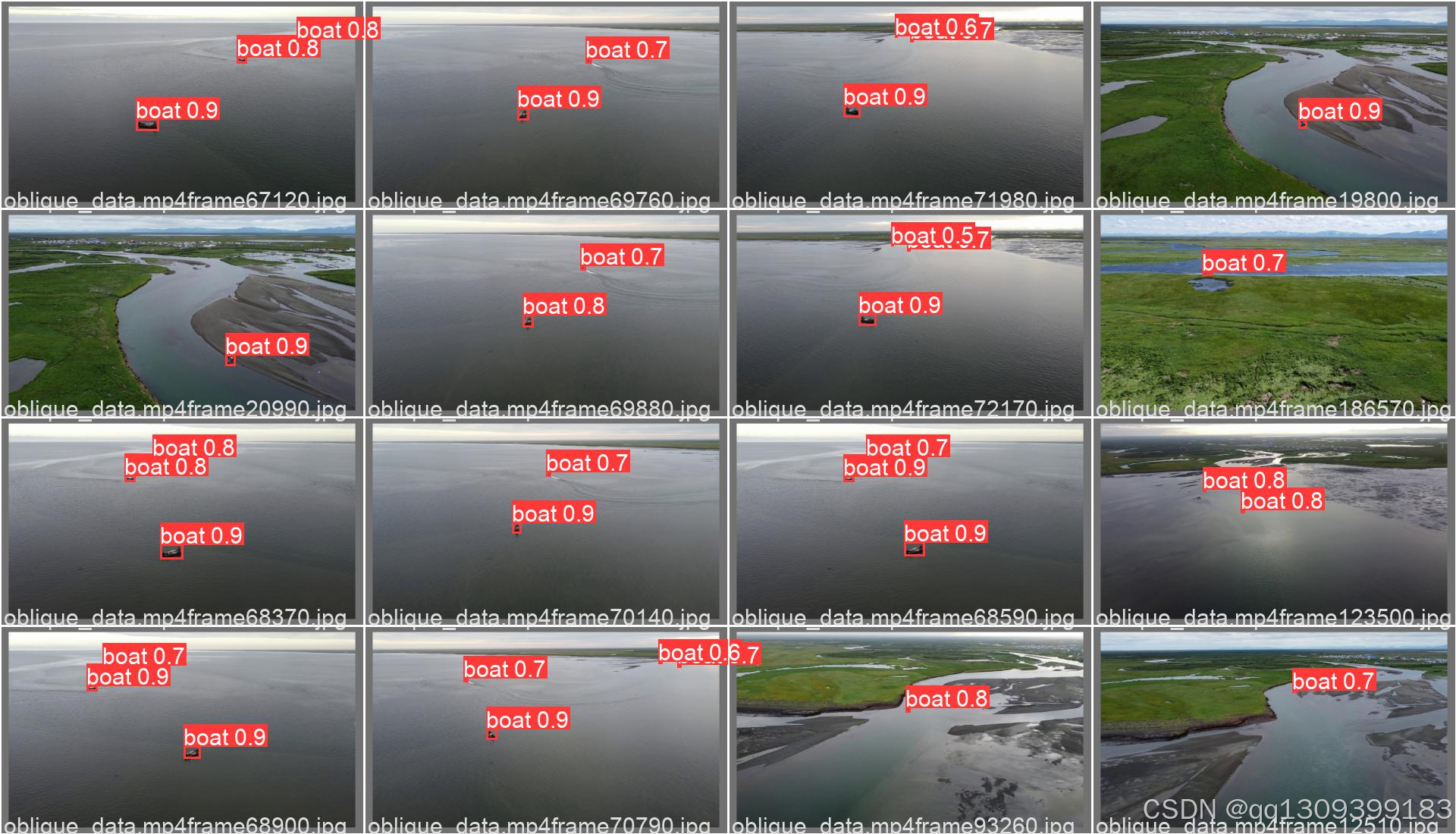
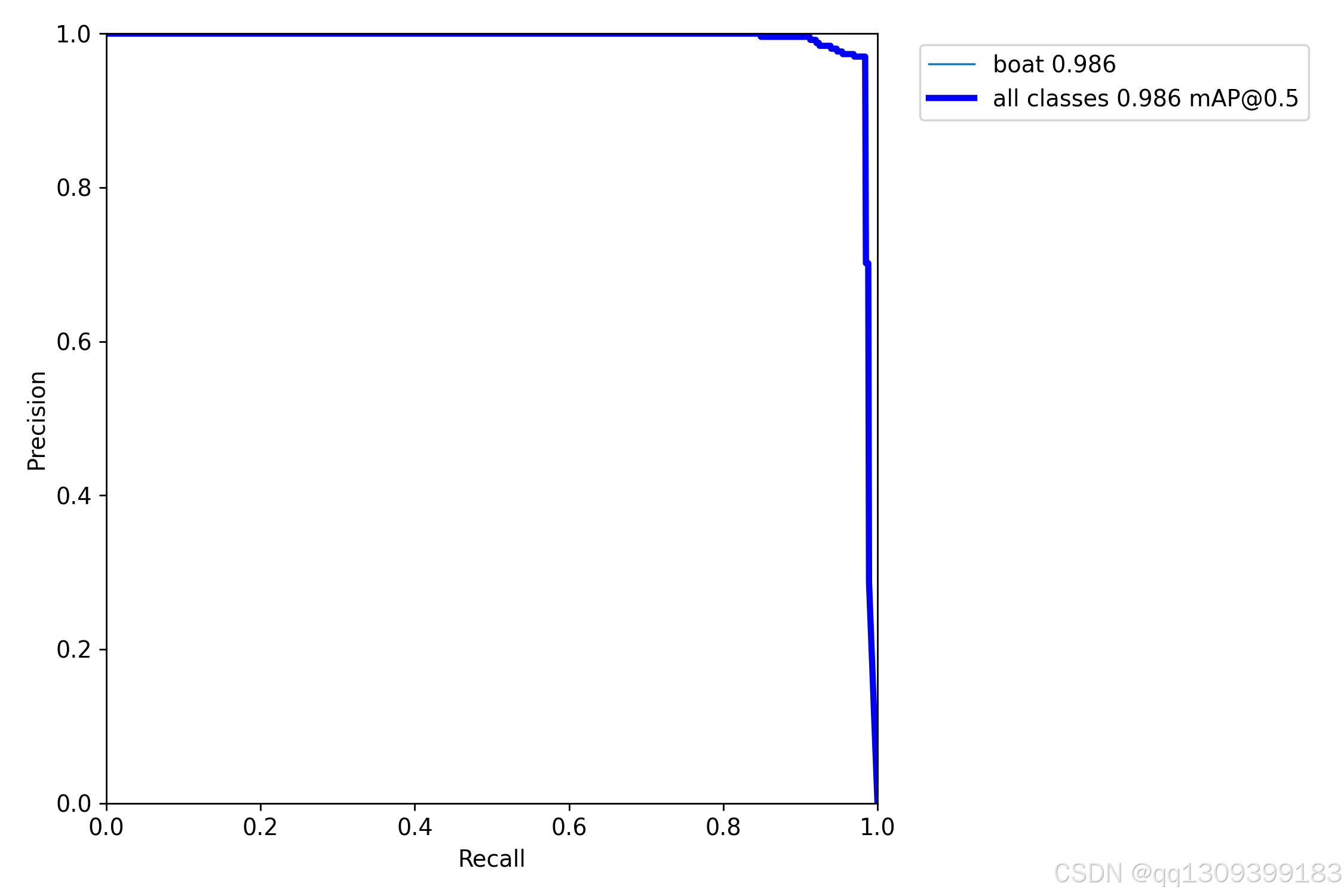
1. 检测效果
- 在开源 SeaShips 数据集上的平均精度(mAP@0.5)达到 96.7%。
- 在无人机实拍测试数据上实现了良好的检测性能,能够准确检测远距离和遮挡情况下的船舶目标。
2. 推理速度
- 在 NVIDIA RTX 3090 上的检测速度达到 125 FPS。
- 在无人机嵌入式硬件(如 NVIDIA Jetson Nano)上也能达到 30 FPS 的实时性能。
3. 鲁棒性
模型能够应对复杂的海洋场景,如波浪反射、高光和天气变化。
项目应用场景
- 海洋安全监控:
- 检测非法捕捞活动、海洋污染源及其他威胁。
- 港口管理:
- 自动化监控港口内的船舶进出及停泊情况。
- 无人机巡检:
- 在无人机巡航时自动检测并记录船舶信息。
未来改进方向
- 模型优化:
- 进一步优化 YOLOv11 模型,使其更适合嵌入式设备运行。
- 目标追踪:
- 集成目标跟踪算法(如 SORT 或 DeepSORT)实现船舶的实时跟踪。
- 更多数据集支持:
- 收集更多无人机实拍的船舶数据,提升模型在真实场景中的性能。
结语
本项目基于 YOLOv11 提供了高效的无人机视角船舶检测解决方案,具有广泛的应用潜力。通过进一步优化模型与系统功能,该项目能够更好地服务于海洋监控和无人机相关任务。如果您对本项目感兴趣,欢迎参与开发或提出建议!


















 953
953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









