







YOLO和OpenCV的智能停车位检测系统 🅿️
🔍 项目概述
本项目利用YOLO(You Only Look Once)目标检测算法和OpenCV图像处理库,实时检测并监控停车场内的车位状态。通过高精度的空位与占用车位识别,帮助优化停车场管理效率。
🛠️ 核心功能
✅ 基于YOLOv4/YOLOv8的实时车位检测
✅ OpenCV图像处理技术
✅ 车辆边界框标注与目标检测
✅ 可自定义的停车区域映射
✅ 支持实时摄像头流与视频输入
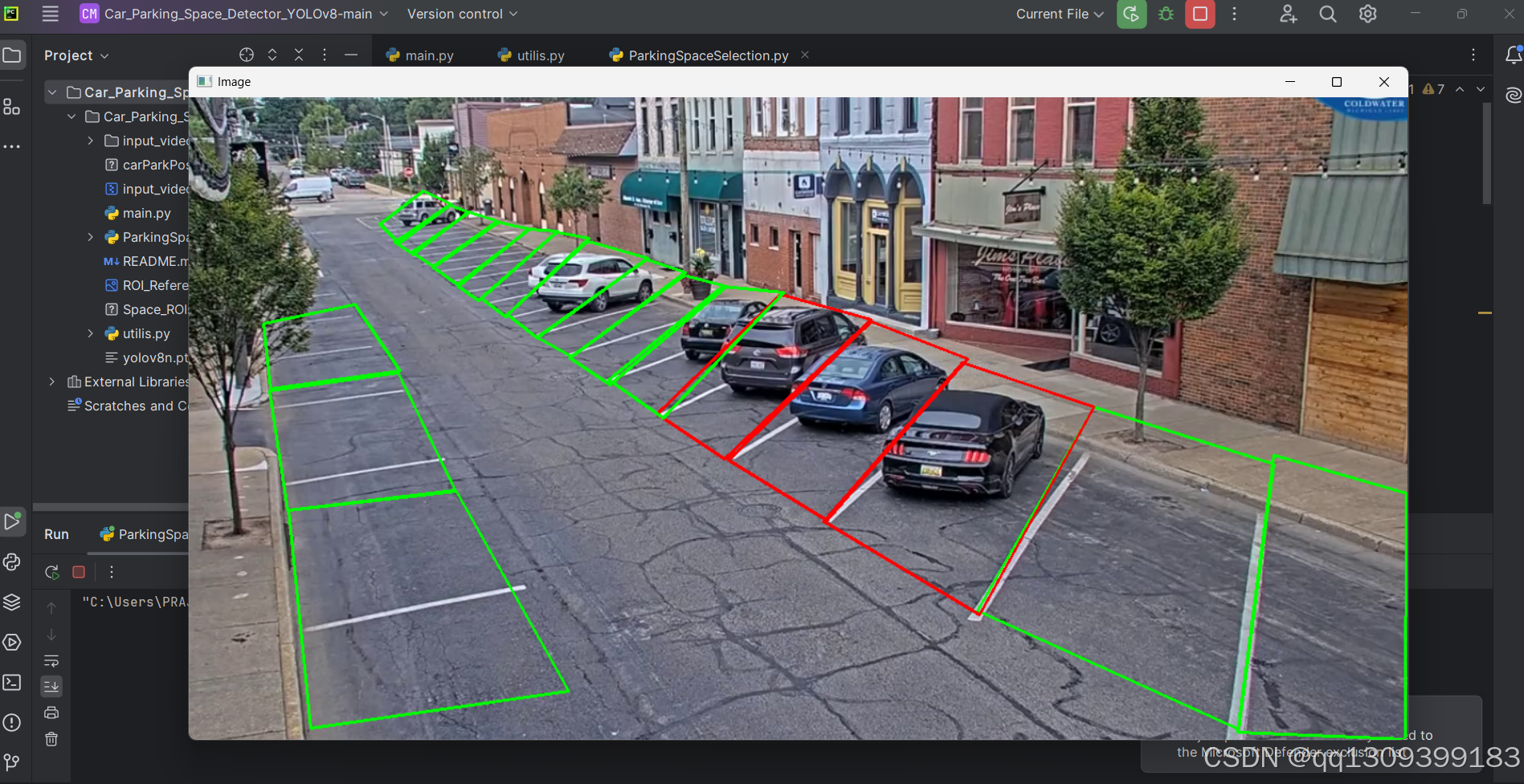
📸 演示效果
![Screenshot 2025-02-19 211822]

🏗️ 安装指南
1️⃣ 进代码
cd Smart-Parking-Space-Detector-using-YOLO-and-OpenCV
2️⃣ 安装依赖库
pip install -r requirements.txt
3️⃣ 下载YOLO权重文件
从YOLO官网下载YOLOv4权重或使用预训练的YOLOv8模型,将权重文件放入models/目录。
4️⃣ 运行检测脚本
python detect_parking.py --source video.mp4
或使用摄像头实时检测:
python detect_parking.py --source 0
import cv2
import pickle
import numpy as np
try:
with open(r"E:\Car_Parking_Space_Detector_YOLOv8-main\Car_Parking_Space_Detector_YOLOv8-main\Space_ROIs",
'rb') as f:
posList = pickle.load(f)
except FileNotFoundError:
posList = []
polygon_points = [] # List to store points of the polygon
def mouseClick(event, x, y, flags, params):
global polygon_points, posList
if event == cv2.EVENT_LBUTTONDOWN:
polygon_points.append((x, y))
if len(polygon_points) == 4:
posList.append(polygon_points.copy())
with open('carParkPos', 'wb') as f:
pickle.dump(posList, f)
polygon_points = []
elif event == cv2.EVENT_RBUTTONDOWN:
for i, polygon in enumerate(posList):
if cv2.pointPolygonTest(np.array(polygon, dtype=np.int32), (x, y), False) >= 0:
posList.pop(i)
with open('carParkPos', 'wb') as f:
pickle.dump(posList, f)
break
while True:
img = cv2.imread(r"E:\Car_Parking_Space_Detector_YOLOv8-main\Car_Parking_Space_Detector_YOLOv8-main\ROI_Reference.png")
for polygon in posList:
pts = np.array(polygon, np.int32)
pts = pts.reshape((-1, 1, 2))
cv2.polylines(img, [pts], True, (0, 0, 255), 2)
for point in polygon_points:
cv2.circle(img, point, 5, (0, 255, 0), -1)
cv2.imshow("Image", img)
cv2.setMouseCallback("Image", mouseClick)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
📂 项目结构
📂 Smart-Parking-Space-Detector
┣ 📂 models/ # YOLO模型权重文件
┣ 📂 data/ # 停车场图像/视频数据
┣ 📂 utils/ # 辅助功能函数
┣ 📜 detect_parking.py # 主检测脚本
┣ 📜 requirements.txt # 依赖库列表
┣ 📜 README.md # 项目文档
🚀 未来扩展计划
🔹 开发移动端应用提供便捷访问 📱
🔹 接入云数据库存储停车统计信息 ☁️
🔹 集成车牌识别功能加强安保 🔢


















 498
498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









