







PCL包围盒(详细介绍)
实现效果:

原理分析:
1.包围盒简介
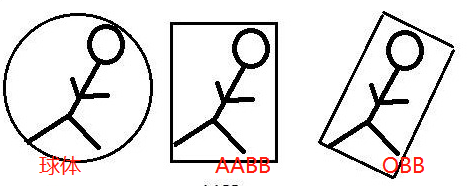
包围盒也叫外接最小矩形,是一种求解离散点集最优包围空间的算法,基本思想是用体积稍大且特性简单的几何体(称为包围盒)来近似地代替复杂的几何对象。
常见的包围盒算法有AABB包围盒、包围球、方向包围盒OBB以及固定方向凸包FDH。碰撞检测问题在虚拟现实、计算机辅助设计与制造、游戏及机器人等领域有着广泛的应用,甚至成为关键技术。而包围盒算法是进行碰撞干涉初步检测的重要方法之一。
最小包围盒的计算过程大致如下:
1.利用PCA主元分析法获得点云的三个主方向,获取质心,计算协方差,获得协方差矩阵,求取协方差矩阵的特征值和特长向量,特征向量即为主方向。
2.利用1中获得的主方向和质心,将输入点云转换至原点,且主方向与坐标系方向重回,建立变换到原点的点云的包围盒。
3.给输入点云设置主方向和包围盒,通过输入点云到原点点云变换的逆变换实现。
PCA(Principal Component Analysis)主成分分析
主成分分析可以用来计算有多个变量组成的数据集的坐标系空间,数据集的多个变量可以分成多个不相关分量,存在一个顶点位置数组中的x,y,z坐标值就是这样的数据集(点云)。数据集中最不同的方向表示主分量的基本主元。
将每个点设为 ,点云就看作
,点云就看作 N个点构成的数据集。首先利用以下公式计算位置平均数m
N个点构成的数据集。首先利用以下公式计算位置平均数m
在构建一个协方差矩阵C,
协方差矩阵是由以下六个元素组成的对称矩阵:

协方差矩阵表示x,y,z坐标值之间的相互关系。若这三个坐标值两两无关,则他们在协方差矩阵上元素的值为0,为了将所有的点集中均匀的沿着坐标轴分布,需要将协方差矩阵转换成对角阵。我们可以利用线性代数里面的内容:

以 作为该对象自然轴对应的方向,下面计算出从顶点沿X、Y、Z三个方向最大和最小位置,根据这些最大值和最小值可以容易的构建出边界盒的六个平面。
作为该对象自然轴对应的方向,下面计算出从顶点沿X、Y、Z三个方向最大和最小位置,根据这些最大值和最小值可以容易的构建出边界盒的六个平面。
为了确定最大和最小的范围,可以通过计算每个顶点位置坐标Pi与单位向量的内积来完成。边界盒的6个平面分别为:
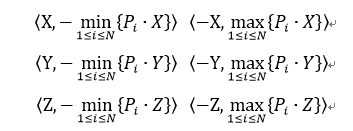
边界盒的尺寸就是X,Y,Z三个方向上相应内积的最大值与最小值之差,边界盒的中心O就是三对反向平面中三个平面的交点,令a,b,c分别为X,Y,Z上最大值与最小值的平均值:

PCA在很多地方还可以用到,笔者觉得了协方差矩阵、特征值、特征向量的几何意义是理解PCA的关键。上述代码中还用到四元数,四元数主要用于旋转变化。
代码如下:
#include <pcl/features/moment_of_inertia_estimation.h>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/cloud_viewer.h>
int main (int argc, char** argv)
{
if (argc != 2)
return (0);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ> ());
if (pcl::io::loadPCDFile (argv[1], *cloud) == -1)
return (-1);
pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;
feature_extractor.setInputCloud (cloud); //default clould
feature_extractor.compute ();
std::vector <float> moment_of_inertia; //¹ßÐÔ¾à
std::vector <float> eccentricity; //ÀëÐÄÂÊ
pcl::PointXYZ min_point_AABB;
pcl::PointXYZ max_point_AABB;
pcl::PointXYZ min_point_OBB;
pcl::PointXYZ max_point_OBB;
pcl::PointXYZ position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
float major_value, middle_value, minor_value; //eigenÊǼÆËã¾ØÕóµÄ¿ªÔ´¿â
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center;
feature_extractor.getMomentOfInertia (moment_of_inertia); //ÌØÕ÷ÌáÈ¡»ñÈ¡¹ßÐÔ¾à
feature_extractor.getEccentricity (eccentricity); //ÌØÕ÷ÌáÈ¡»ñÈ¡ÀëÐÄÂÊ
feature_extractor.getAABB (min_point_AABB, max_point_AABB); //ÌØÕ÷ÌáÈ¡AABB
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB); //ÌØÕ÷ÌáÈ¡OBB
feature_extractor.getEigenValues (major_value, middle_value, minor_value); //»ñÈ¡ÌØÕ÷Öµ
feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector); //ÌØÕ÷ÏòÁ¿
feature_extractor.getMassCenter (mass_center); //»ñÈ¡×î´óÖÊÐÄ
//boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("µãÔÆ¿âPCLѧϰ½Ì³ÌµÚ¶þ°æ-»ùÓÚ¹ßÐÔ¾ØÓëÆ«ÐÄÂʵÄÃèÊö×Ó"));
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer->setBackgroundColor (1, 1, 1); //±³¾°
viewer->addCoordinateSystem (1.0); //Ìí¼Ó×ø±êϵ
viewer->initCameraParameters (); //³õʼ»¯Ïà»ú²ÎÊý
viewer->addPointCloud<pcl::PointXYZ> (cloud,pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>(cloud,0,255,0), "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,5,"sample cloud");
viewer->addCube (min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 0.0, 0.0, "AABB"); //Ìí¼ÓÕý·½ÐÎ
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,0.1,"AABB"); //ÉèÖöÔÓ¦µãÁ¬Ïß
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,4,"AABB"); //ÉèÖöÔÓ¦µãÁ¬ÏߵĿí¶È
Eigen::Vector3f position (position_OBB.x, position_OBB.y, position_OBB.z); //ÏòÁ¿Î»ÖÃ
std::cout<<"position_OBB: "<<position_OBB<<endl;
std::cout<<"mass_center: "<<mass_center<<endl;
Eigen::Quaternionf quat (rotational_matrix_OBB); //ËÄÔªÓ÷¨
viewer->addCube (position, quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y, max_point_OBB.z - min_point_OBB.z, "OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0,0,1,"OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,0.1,"OBB");
viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,4,"OBB");
viewer->setRepresentationToWireframeForAllActors();
pcl::PointXYZ center (mass_center (0), mass_center (1), mass_center (2));
pcl::PointXYZ x_axis (major_vector (0) + mass_center (0), major_vector (1) + mass_center (1), major_vector (2) + mass_center (2));
pcl::PointXYZ y_axis (middle_vector (0) + mass_center (0), middle_vector (1) + mass_center (1), middle_vector (2) + mass_center (2));
pcl::PointXYZ z_axis (minor_vector (0) + mass_center (0), minor_vector (1) + mass_center (1), minor_vector (2) + mass_center (2));
viewer->addLine (center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");
viewer->addLine (center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");
viewer->addLine (center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");
std::cout<<"size of cloud :"<<cloud->points.size()<<endl;
std::cout<<"moment_of_inertia :"<<moment_of_inertia.size()<<endl;
std::cout<<"eccentricity :"<<eccentricity.size()<<endl;
//Eigen::Vector3f p1 (min_point_OBB.x, min_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p2 (min_point_OBB.x, min_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p3 (max_point_OBB.x, min_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p4 (max_point_OBB.x, min_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p5 (min_point_OBB.x, max_point_OBB.y, min_point_OBB.z);
//Eigen::Vector3f p6 (min_point_OBB.x, max_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p7 (max_point_OBB.x, max_point_OBB.y, max_point_OBB.z);
//Eigen::Vector3f p8 (max_point_OBB.x, max_point_OBB.y, min_point_OBB.z);
//p1 = rotational_matrix_OBB * p1 + position;
//p2 = rotational_matrix_OBB * p2 + position;
//p3 = rotational_matrix_OBB * p3 + position;
//p4 = rotational_matrix_OBB * p4 + position;
//p5 = rotational_matrix_OBB * p5 + position;
//p6 = rotational_matrix_OBB * p6 + position;
//p7 = rotational_matrix_OBB * p7 + position;
//p8 = rotational_matrix_OBB * p8 + position;
//pcl::PointXYZ pt1 (p1 (0), p1 (1), p1 (2));
//pcl::PointXYZ pt2 (p2 (0), p2 (1), p2 (2));
//pcl::PointXYZ pt3 (p3 (0), p3 (1), p3 (2));
//pcl::PointXYZ pt4 (p4 (0), p4 (1), p4 (2));
//pcl::PointXYZ pt5 (p5 (0), p5 (1), p5 (2));
//pcl::PointXYZ pt6 (p6 (0), p6 (1), p6 (2));
//pcl::PointXYZ pt7 (p7 (0), p7 (1), p7 (2));
//pcl::PointXYZ pt8 (p8 (0), p8 (1), p8 (2));
//viewer->addLine (pt1, pt2, 1.0, 0.0, 0.0, "1 edge");
//viewer->addLine (pt1, pt4, 1.0, 0.0, 0.0, "2 edge");
//viewer->addLine (pt1, pt5, 1.0, 0.0, 0.0, "3 edge");
//viewer->addLine (pt5, pt6, 1.0, 0.0, 0.0, "4 edge");
//viewer->addLine (pt5, pt8, 1.0, 0.0, 0.0, "5 edge");
//viewer->addLine (pt2, pt6, 1.0, 0.0, 0.0, "6 edge");
//viewer->addLine (pt6, pt7, 1.0, 0.0, 0.0, "7 edge");
//viewer->addLine (pt7, pt8, 1.0, 0.0, 0.0, "8 edge");
//viewer->addLine (pt2, pt3, 1.0, 0.0, 0.0, "9 edge");
//viewer->addLine (pt4, pt8, 1.0, 0.0, 0.0, "10 edge");
//viewer->addLine (pt3, pt4, 1.0, 0.0, 0.0, "11 edge");
//viewer->addLine (pt3, pt7, 1.0, 0.0, 0.0, "12 edge");
while(!viewer->wasStopped())
{
viewer->spinOnce (100);
boost::this_thread::sleep (boost::posix_time::microseconds (100000));
}
return (0);
}
Compiling and running the program
创建 CMakeLists.txt 文件,复制下面内容到该文件(文件和)。
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(moment_of_inertia)
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (moment_of_inertia moment_of_inertia.cpp)
target_link_libraries (moment_of_inertia ${PCL_LIBRARIES})
通常在build文件夹下,执行下面命令:
$ ./moment_of_inertia lamppost.pcd
















 774
774











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











