






本文主要参考:Morgan_Kaufmann.Real-Time Collision Detection(2005)
包围盒是一个简单的几何空间,里面包含着复杂形状的物体。最常见的包围盒算法有包围球(Sphere),轴对齐包围盒(Axis-aligned bounding box)AABB盒,OBB方向包围盒(Oriented bounding box), FDH固定方向凸包(Fixed directions hulls或k-DOP)等。这些表示法对于规则形状的物体较为有效,计算速度较快,但在捕捉不规则形状时由于包含了一定的无用空间,因此可能存在一定的精度损失。
OBB紧凑地贴合物体的实际形状,与物体的主要方向对齐。这种贴合性使得OBB能够较精确地反映被包围物体的外形,它减少了不必要的安全距离。
虽然OBB的碰撞检测计算复杂度高于AABB,但它在处理复杂或长条形状物体时更为有效,因为它减少了误报的碰撞检测次数。与AABB不同,OBB随物体旋转而旋转,保持与物体的相对方向一致。这使得OBB在处理旋转物体时保持了包围盒的大小和形状不变,从而在动态环境中提供了更稳定的避障性能。
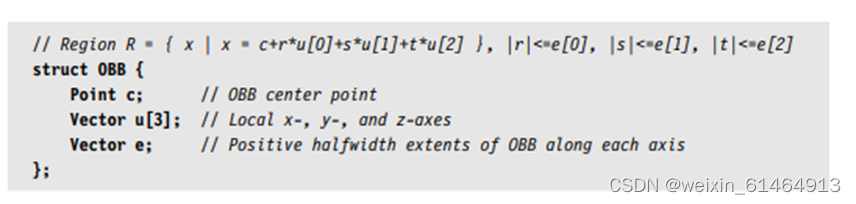
OBB盒有不同的表示方法,首选的是一个中心点加一个主方向矩阵和三个半边长度,这种表示方法更易于进行包围盒与包围盒之间的交叉测试。
 第一步,准备数据,收集物体的所有顶点数据。
第一步,准备数据,收集物体的所有顶点数据。
第二步,计算所有顶点的平均位置即几何中心,可以初步确定为OBB盒的中心点。
中心点= 。其中,N是顶点的数量,Pi是第 i个顶点的位置。
第三步,进行PCA分析,获取这组数据的主要分布方向。
主成分分析(PCA)是一种通过正交变换,将一组可能相关的变量集合变换成一组线性不相关的变量集合,即主成分。在这里引入协方差矩阵的概念,协方差表示的使两个变量之间的线性相关程度。协方差越小则表示两个变量之间越独立,即线性相关性小。
由此可以得到一个协方差矩阵(if 三维数据)
主对角线的元素表示变量的方差,主对角线的元素较大则表示强信号。非主对角线的元素表示变量之间的协方差,较大的非对角线元素表示数据的畸变。由于协方差矩阵是一个实对称矩阵,所以为了减小畸变,可以重新定义变量间的线性组合,将协方差矩阵相似对角化。
通过矩阵相似变换可以求得其特征值和特征向量Q,特征向量代表数据中的主要方向,而对应的特征值则表示这些方向的方差大小,即分布的广度。
第四步,确定OBB包围盒的朝向和中心点。
第五步,投影计算半边长度。将各个顶点投影到主轴上,计算投影后的极值,物体的尺寸即可通过计算最大值和最小值的差来得到,由此可以得到各个主轴方向的半边长度。
由此,基本上可以生成一个OBB包围盒。
如何判断多个OBB盒是否相撞?
分离轴定理:即如果存在一个轴(即分离轴),使得将两个对象在这个轴上的投影分开,那么这两个对象不相交。而在两个OBB包围盒,至多存在15个轴。两个OBB的每个局部坐标轴(共6个轴);两个盒子的轴之间的交叉乘积(可能的9个轴)。但是绝多数情况下是不需要全算完的。
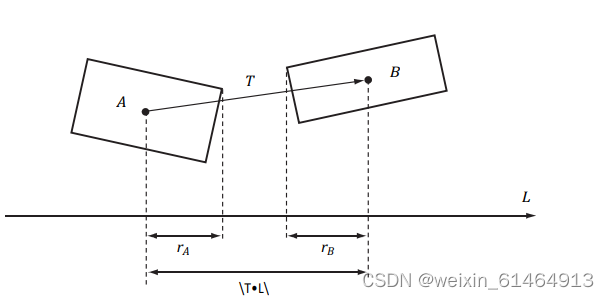
两个盒子不发生碰撞的充要条件是.
代码可参考Chatgpt生成,MATLAB的确实会简单很多。















 5440
5440











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









