






1. 运动功能说明
简易四足机器人可以实现简单的前后和后退功能。
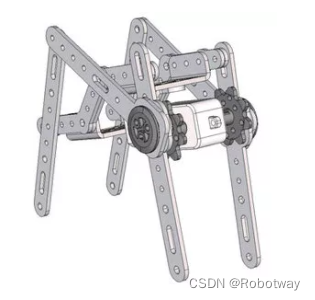
2.结构说明
该样机由两组仿生腿构成,仿生腿由直流电机驱动,包含1个偏心轮滑块机构,和1个偏心轮摇杆机构,通过偏心轮安装的相位差来确定前、后2条腿的迈步节奏。

前腿的传动结构运动原理,如下图所示:

后腿的传动结构运动原理,如下图所示:

3. 运动功能实现
偏心轮连杆简易四足机构只有一个直流电机驱动,随着直流电机的正反转,就可以实现前进和后退,因此可以参考【U001】如何驱动直流有刷电机一文。
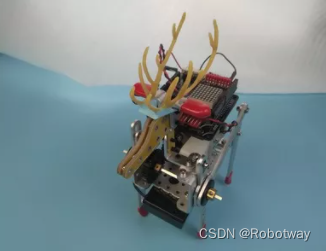
4. 扩展样机
本样机有一些简单的扩展案例,如取消传动轴,将两侧的把偏心轮都直接连接在电机的输出轴上,或更换电机等:

另外,本样机还可以用3D打印件、纸黏土、瓦楞纸、彩色卡纸等制作出各种动物外观。



5. 资料下载
资料内容:样机3D文件
详情请参考: 偏心轮连杆简易四足

















 6408
6408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









