



 本文介绍了激光成像雷达的基本概念和技术特点,包括其在目标识别、机器人导航等方面的应用优势。详细阐述了激光成像雷达的工作原理,并对比了非扫描成像雷达的优势。
本文介绍了激光成像雷达的基本概念和技术特点,包括其在目标识别、机器人导航等方面的应用优势。详细阐述了激光成像雷达的工作原理,并对比了非扫描成像雷达的优势。
激光雷达有非成像和成像之分。激光成像雷达的关键技术包括,高质量可控制的激光发射源,激光回波信号接收技术,二维或三维扫描技术,图像处理及目标识别算法。国外激光成像雷达技术方面的研究比较早,在机器人自动导航、目标识别等系统中得到了应用。我国近些年也有部分企业开始进行这方面的研究,例如:国内SLAMTEC-思岚科技公司,前身是创客团队RoboPeak,从2009年就开始从事机器人相关领域的研发,有着近7年的机器人自主定位导航算法、激光传感器及机器人硬件系统的研发经验。前身是拥有多年的机器人自主定位导航算法、激光传感器及机器人硬件系统的研发经验。目前已研发出RPLIDAR A1及升级版的RPLIDAR A2 360度激光扫描测距雷达。激光成像雷达的发展一直受到各国的高度关注,究其原因,主要是因为激光成像雷达有以下一系列的优点:
激光成像雷达优点
1、激光成像雷达得到的图像不同于红外图像,允许使用比处理红外场景简单的算法实现目标捕获。
2、激光成像雷达具有极高的角分辨率、距离分辨率、速度分辨率,能获得目标的多种(如方位角一俯仰角一距离、距离一速度一强度)图像,抗干扰能力强,比微波雷达的体积和重量小等,它提供了普通成像技术(如电视摄像、航空摄影及红外成像等)所不能提供的信息。
3、激光成像雷达是一种能够对抗电子战、反辐射导弹、超低空突防和隐藏目标的能力。不仅能够探i910和跟踪目标,获得目标的方位、速度信息及普通雷达不能得到的其他信息,而且还能完成普通雷达不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。激光成像激光雷达系统可以直接获得目标的轮廓和位置信息(即强度像和距离像),可完成目标探测、分类、识别跟踪,完成制导或火控任务。
为了让大家更全面的了解激光成像雷达,下面再为大家简要介绍激光成像雷达工作原理。
激光成像雷达工作原理讲解
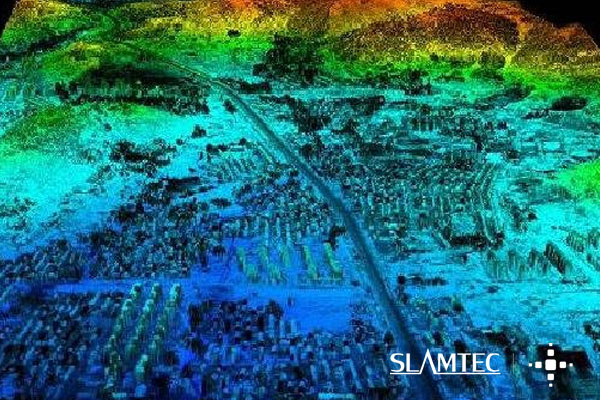
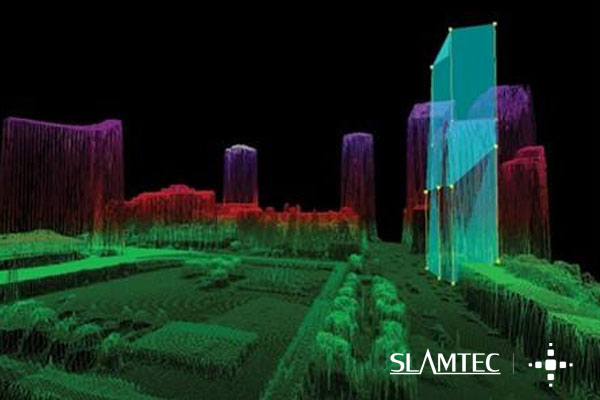
激光成像雷达系统的工作原理基于激光束对目标场景进行扫描,接收场景反射的激光辐射,产生连续的模拟信号,还原成实时目标场景的图像。非扫描成像雷达系统是90年代出现的新型成像雷达,因没有机械扫描装置,可克服传统的扫描激光雷达帧率低、视场小、体积大等问题,具有高帧率、宽视场、体积小的特点,在军事和商业上有着广泛地应用前景。
非扫描激光雷达系统的工作原理大致可分为三类:
1、面阵旋光法一进行一次探测也可测得距。
2、面阵相位法一利用已有的单元技术和器件,研发成本较低,但需多次测量;
3、面阵测时法一只需一次探测即可得到距离图像,从而可达到很高的帧率;
激光成像雷达技术是一项很复杂的技术,目前虽有了长足的发展,但仍有许多关键技术需要解决。在激光成像类似的应用中体积、重量、分辨率、成像速度率和作用距离也是考虑的重要因素。


















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









