






MPC无人驾驶车辆模型预测控制 基于动力学轨迹跟踪,参考轨迹可任选,包括(双移线,五次多项式等),资料里包括代码各种设置信息,附手写推导过程(从动力学建模到mpc算法推导过程)
ID:5125675081988246
1232力
MPC无人驾驶车辆模型预测控制:动力学轨迹跟踪与算法推导
MPC(Model Predictive Control)无人驾驶车辆模型预测控制是一种基于动力学轨迹跟踪的控制方法,它通过对车辆动力学模型的建模和预测,实现了对车辆路径的精确控制。本文将介绍MPC无人驾驶车辆模型预测控制的原理、算法推导过程以及相关应用。
一、MPC无人驾驶车辆模型预测控制原理
MPC无人驾驶车辆模型预测控制的核心思想是在每个控制周期内,利用车辆动力学模型对未来一段时间内的车辆状态进行预测,并基于这些预测结果进行优化,从而实现对车辆的路径控制。具体而言,MPC控制器会预测车辆的轨迹、速度、加速度等状态,并通过优化算法,对车辆的控制输入进行调整,以实现对参考轨迹的跟踪。
二、MPC无人驾驶车辆模型预测控制算法推导过程
-
车辆动力学模型建模
在MPC无人驾驶车辆模型预测控制中,首先需要对车辆的动力学进行建模。一般而言,可以使用双轮模型或者多体动力学模型等来描述车辆的运动。在这里,我们以双轮模型为例,将车辆的运动分为横向和纵向两个方向进行建模,并考虑车辆的质量、惯性等因素。 -
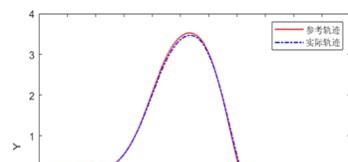
轨迹生成和参考轨迹选取
为了实现对参考轨迹的跟踪,需要通过轨迹生成算法生成一条合适的参考轨迹,并将其作为MPC控制器的输入。参考轨迹的生成算法可以包括双移线、五次多项式等,具体选择可以根据实际需求进行灵活应用。 -
MPC控制器的优化问题建立和求解
在MPC无人驾驶车辆模型预测控制中,关键的一步是建立控制器的优化问题,并通过求解优化问题来实现对车辆的控制输入调整。优化问题的建立可以基于车辆动力学模型和参考轨迹,同时考虑车辆的约束条件(如速度、加速度限制等)和控制器的性能指标(如跟踪误差最小化、平滑性等)。
三、MPC无人驾驶车辆模型预测控制的应用
MPC无人驾驶车辆模型预测控制在实际应用中具有广泛的应用前景。例如,在自动驾驶领域,MPC控制器可以实现对车辆的路径跟踪、车道保持等功能;在智能交通系统中,MPC控制器可以应用于交通流优化、拥堵减缓等场景。此外,MPC控制器还可以结合其他传感器数据(如激光雷达、摄像头数据等),实现对车辆周围环境的感知和决策。
总结:
MPC无人驾驶车辆模型预测控制是一种基于动力学轨迹跟踪的控制方法,它通过对车辆动力学模型的建模和预测,实现了对车辆路径的精确控制。本文介绍了MPC无人驾驶车辆模型预测控制的原理、算法推导过程以及相关应用。通过合理的轨迹生成算法和优化问题建立与求解,MPC控制器能够实现对参考轨迹的跟踪和优化控制,具有广泛的应用前景。在未来的研究和开发中,我们可以进一步优化算法性能,提高无人驾驶车辆的安全性和智能化水平。
以上相关代码,程序地址:http://matup.cn/675081988246.html















 714
714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









