







 该博客介绍了如何在ZYNQ平台上利用FPGA加速实现双目立体视觉的三维重建,包括相机标定、立体匹配算法(BM和SGBM)、深度图到彩虹图的转换。实验结果显示,系统能处理720p图像,帧率为30fps,精度约10mm,有效距离达5米。博主计划推出详细专栏分享从零构建ZYNQ实时三维重建项目的全过程。
该博客介绍了如何在ZYNQ平台上利用FPGA加速实现双目立体视觉的三维重建,包括相机标定、立体匹配算法(BM和SGBM)、深度图到彩虹图的转换。实验结果显示,系统能处理720p图像,帧率为30fps,精度约10mm,有效距离达5米。博主计划推出详细专栏分享从零构建ZYNQ实时三维重建项目的全过程。
ZYNQ上基于FPGA加速的 双目立体视觉 三维重建 生成 实时深度图彩虹图 (zedboard板)
1.在ZYNQ上完成双目采集成像,PS+PL协同处理。
2.在ZYNQ上完成相机标定,镜头校准。
3.在ZYNQ上完成立体匹配算法,目前已实现局部立体匹配BM以及半全局立体匹配SGBM
4.在ZYNQ上完成了立体匹配后的深度图转换彩虹图,即彩色深度图
5.在ZYNQ上也完成了测距算法,但是目前没有识别算法,只能取图像一点计算距离。精度在10mm内。有效距离目前测试在5m内。
6.优化了所有的算法,目前接近720p的图像质量,并且帧率在30fps左右。
详细的实现过程会出一个专栏,每周更一次,从零开始的项目搭建ZYNQ上的实时三维重建。
部分实验过程记录:
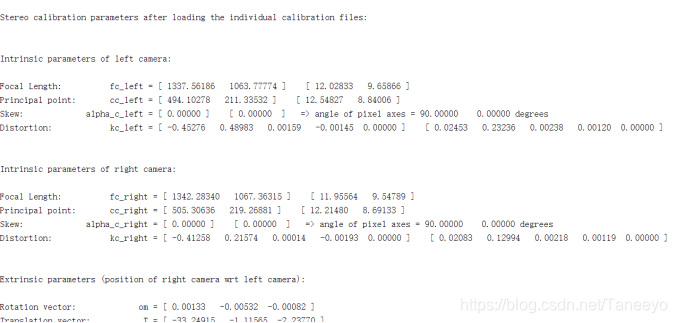
标定过程:
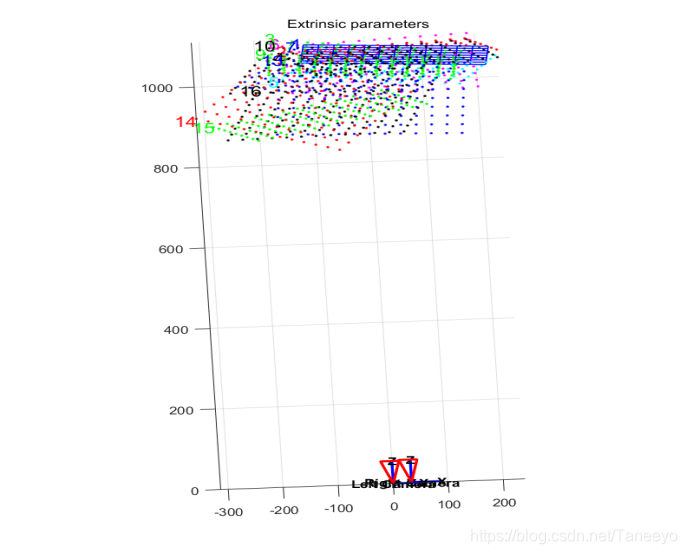
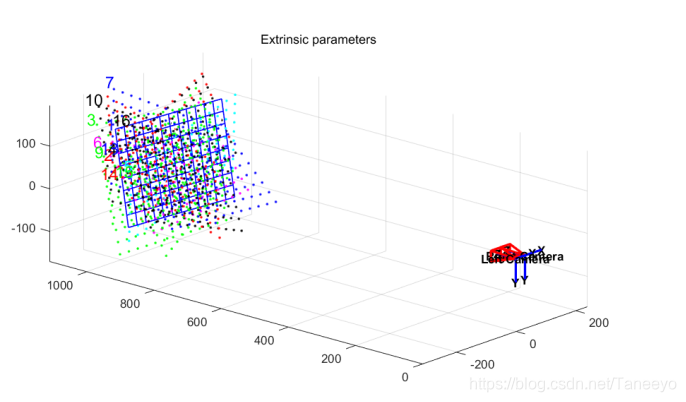
得到相机的内参矩阵和外参矩阵
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 933
933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









