






周末看到一篇有意思的文章,主要是关于大尺度图像下的小目标检测相关的工作,原文地址在这里,如下所示:
航空影像中的目标检测具有很大的挑战性,主要原因有以下几个方面:1)航空影像通常具有非常大的尺寸,通常有数百万甚至数亿像素,而计算资源有限。2) 较小的对象大小导致有效检测的信息不足。3) 对象分布不均匀导致计算资源浪费。为了解决这些问题,我们提出了YOLC(只查看集群),这是一个高效的框架,构建在无锚对象检测器CenterNet的基础上。为了克服大尺度图像和目标分布不均匀带来的挑战,提出了一种局部尺度模型(LSM),该模型自适应地搜索聚类区域进行放大以实现精确检测。此外,我们使用高斯瓦瑟斯坦距离(GWD)修正回归损失,以获得高质量的边界框。在检测头中采用了变形卷积和细化的方法来增强对小目标的检测。我们在VisDrone 2019和UAVDT两个航空影像数据集上进行了大量实验,验证了所提方法的有效性和优越性。
INTRODUCTION
近年来,随着深度学习的快速发展,目标检测技术取得了长足的进步。目标检测器(例如,更快的R-CNN[1]、YOLO[2]和SSD[3])在自然图像数据集(例如,MS COCO[4]、Pascal VOC[5])上取得了显著的结果。然而,它们在航空图像上的性能在精度和效率方面还达不到令人满意的水平。航空图像通常由无人机(UAV)、飞机和卫星捕获,从而形成鸟瞰图和宽视野,将它们与自然图像区分开来。航空图像中的目标检测具有很大的挑战性,主要原因有三个:
1)航空图像通常非常大,超过了现有设备的处理能力。因此,需要将这些图像的大小调整为较小的大小,或将其分割为较小的作物进行检测。
2) 微小目标是航空图像的重要组成部分,使得探测器难以识别分辨率和视觉特征有限的微小目标。一般来说,小对象是指面积小于32×32的对象[4]。
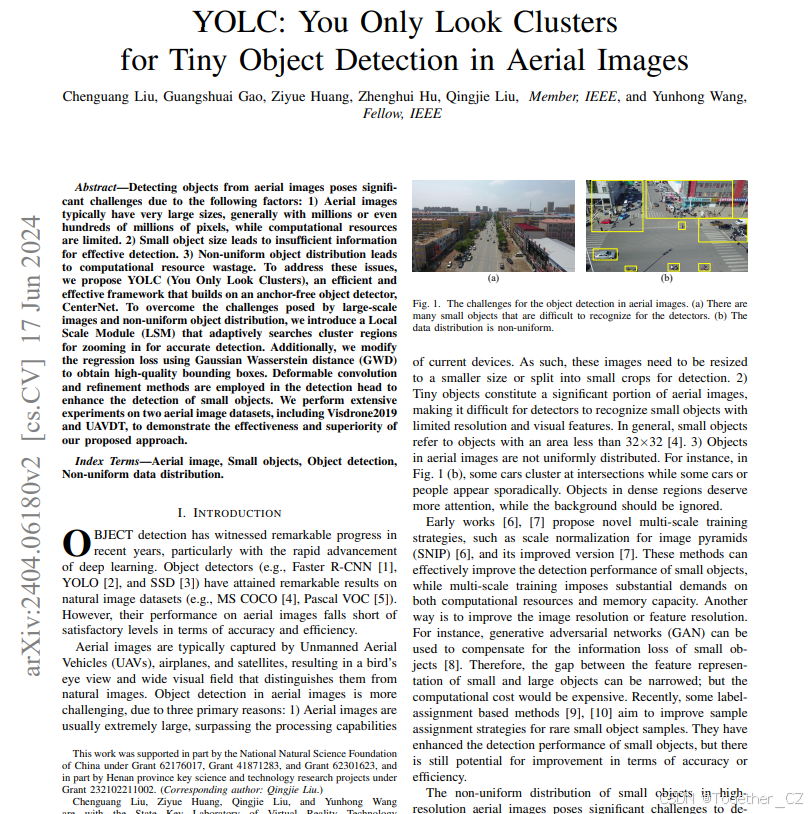
3) 航空影像中的物体分布不均匀。例如,在图1(b)中,一些车辆聚集在十字路口,而一些车辆或人偶尔出现。密集区域中的目标更值得注意,而背景则应忽略不计。早期文献[6]、[7]提出了新的多尺度训练策略,如图像金字塔尺度归一化(SNIP)[6]及其改进版本[7]。这些方法可以有效地提高小目标的检测性能,而多尺度训练对计算资源和存储容量都有很大的要求。另一种方法是提高图像分辨率或特征分辨率。例如,生成性对抗网络(GAN)可用于补偿小对象的信息损失[8]。因此,可以缩小大小对象特征表示之间的差距;但是计算成本会很高。最近,一些基于labelassignment的方法[9]、[10]旨在改进稀有小对象样本的样本分配策略。它们增强了小目标的检测性能,但在准确性或效率方面仍有改进的潜力。高分辨率航空影像中小目标的不均匀分布给探测器带来了巨大的挑战,导致大尺度航空影像的探测效率和精度降低。为了解决这些问题,一种简单的方法是将图像分割成若干种作物,并将其放大,如均匀裁剪[11]所示。然而,该方法不能考虑目标分布的不均匀性,检测所有作物仍然需要大量的时间。
为了应对上述挑战,已经提出了主流解决方案,包括设计专用方案来定位集群区域[11]–[15],随后可用于检测。ClusDet【12】采用集群检测网络来检测对象集群。DMNet[13]对对象分布进行建模,并通过密度图生成簇区域。这些策略在保留聚类区域的同时,尽可能地抑制背景的影响,取得了较好的效果。然而,每个作物的独立检测降低了推理速度。另外,当上述方法生成簇区域时,某些簇中的对象分布是稀疏的,对最终性能的贡献很小。因此,在精度和效率之间达到最佳平衡是航空图像目标检测的关键问题。受我们观察结果的启发,我们提出了一种创新的无锚聚类网络,称为“只看簇”(YOLC),用于航空图像目标检测。我们的模型使用简单、可扩展和高推理速度的CenterNet[16]作为基线,它直接预测对象的中心,而不依赖于专用的锚定框。这使得它更适合用于检测航空图像中的密集和小对象。值得注意的是,其他研究人员利用CenterNet框架,使用中心感知网络或关键点对遥感对象进行建模。CenterNet[16]使用密度贴图(也称热图)来估计对象位置。热图提供了对对象分布的深入了解,使我们能够区分簇区域和稀疏区域。在此基础上,我们开发了一个局部尺度模块(LSM),该模块可以自适应地搜索聚类区域,并将其调整到适当的尺度,以便检测器有效地运行。
与现有的图像裁剪策略相比,本文提出的LSM具有许多优点[12]、[13]、[15]。首先,它是一个无监督的模块,这意味着它可以无缝集成到任何基于关键点的检测器中,而不需要额外的集群建议网络,从而简化了训练过程,降低了检测系统的总体复杂度。其次,LSM易于实现,内存消耗低,适用于实际应用。最后,与已有文献[12]、[13]、[15]相比,LSM算法生成的图像裁剪量少,推理速度快。这为大比例尺航空影像目标检测提供了一种实用的解决方案。
为了实现更精确的目标检测,我们对CenterNet进行了一些改进。首先,我们使用Gaussian-Wasserstein距离(GWD)[19]修正回归损失,该距离特别适用于检测小对象,但会导致较大对象的性能降低。为了解决这个问题,我们提出了GWD+L1损耗,它结合了两种损耗函数的优点。此外,我们通过使用可变形卷积来细化边界盒回归来改进检测头。我们还为热图设计了一个解耦的分支,允许对不同的对象类别进行更精确的定位。总之,这些改进使得我们的YOLC模型能够在航空图像中实现更精确的目标检测。
总之,主要贡献如下:
1) 提出了一种新颖高效的无锚目标检测框架YOLC,该框架在两个航空影像数据集上均取得了最新的性能。与现有的许多方法相比,该方法简单、美观,只包含一个网络,参数少,效率高。
2) 提出了一种轻量级的无监督局部尺度模型(LSM)自适应搜索聚类区域。
3) 设计了一种改进的基于GWD的回归损失函数,提高了小目标检测的效率。
4) 提出了一种改进的检测头,该检测头利用可变形卷积实现精确的包围盒回归,并设计了一个解纠缠的热图分支对不同类别的目标进行精确定位。
5) 在两个航空影像数据集上的实验结果表明,该方法的有效性和优越性。
RELATED WORK
一般的目标检测方法大致可以分为两类:基于锚的方法和无锚的方法。基于锚定的模型可以根据是否使用候选方案进一步分为两阶段和单阶段方法。两阶段方法主要包括快速RCNN[1]、MASK-RCNN[20]和R-FCN[21]。另一方面,单阶段检测器直接回归边界框和类,而不需要建议阶段。单阶段方法的代表性例子有YOLOs[22]、[23]、SSD[3]和RetinaNet[24]。另一方面,无锚模型不需要复杂的手工锚。一些无锚模型,如Foverbox[25]和FCOS[26],预测位置到边界框四边之间的距离。或者,其他无锚方法仅预测对象的角点或中心点,包括CornerNet[27]、CornerNet lite[28]和CenterNet[16]、[29]。虽然这些检测器在自然场景中表现良好,但在应用于航空图像时往往不能获得令人满意的结果。
小目标检测是一个具有挑战性的重要课题。与一般的目标检测不同,小目标检测会遇到诸如信息丢失、噪声特征表示、边界框扰动容忍度低和样本不足等问题[30]。Cheng等人[30]对小对象检测方法进行了广泛的回顾,将其分为不同的组,如面向样本的[10]、[31]、尺度感知的[6]、[7]、[32]、[33]、基于超分辨率的[8]、[34]、上下文建模[35]、聚焦和检测[12]、[13]、[36]。然而,航空图像通常包含许多小对象,并且具有较大的尺寸。在海量背景下进行检测不费吹灰之力就消耗了计算量。在各种方法中,聚焦和检测技术被发现更加精确和高效的存储,特别是优于超分辨率方法。因此,聚焦和检测方法在航空图像目标检测中得到广泛应用,也被称为基于图像裁剪的方法。
航空影像目标检测由于视场较宽、小目标较多而面临独特的挑战。为了克服这些挑战,图像裁剪策略被广泛采用。例如,Unel等人[11]证明了均匀裁剪对于小目标检测的有效性。R2CNN【35】和SAHI【37】在对高分辨率图像进行检测之前,将它们分割成小的重叠作物。然而,均匀种植的缺点是许多作物只包含背景,导致检测效率低下。为了解决这一局限性,ClusDet[12]提出了一种获得聚类区域的聚类建议网络(CPNet),以及一种尺度估计网络(ScaleNet),用于重新缩放区域以适应检测器。DMNet[13]和CDMNet[36]利用密度图检测对象并学习比例信息。GLSAN【15】采用全局-局部融合策略和渐进式变尺度网络进行精确检测。与这些方法相比,我们引入了一个localscale模块,该模块可以自适应地搜索聚类区域并调整它们的大小以适应检测器,这是简单而有效的。
PROPOSED METHOD
A. Preliminary
CenterNet[16]是一个功能强大且高效的无锚对象检测框架。与使用定位点预测边界框的传统方法不同,CenterNet从对象的中心点回归对象的大小、方向、姿势和关键点。这是通过一个完全卷积网络来实现的,该网络生成对象中心的热图(密度图),然后通过查找热图中的局部极大值来定位中心。使用这些峰值位置的特征,可以推断对象的大小。CenterNet[16]由于其简单性,在不依赖复杂特征工程的情况下实现了卓越的性能,是一种快速有效的目标检测方法,已被研究界广泛采用。CenterNet作为一种具有代表性的无锚检测器,采用高分辨率特征映射进行预测,使其对小对象特别友好和高效。密度贴图是提供有关图像中对象分布信息的强大工具。在CenterNet中,密度贴图用于定位对象。为了提高检测器在检测小目标时的性能,我们使用转置卷积层对特征映射进行上采样以匹配输入图像的大小。此外,本文还提出了一种局部尺度模型,利用热图自适应搜索聚类区域并调整其大小以适应检测器,从而进一步提高检测精度。
B. You Only Look Clusters (YOLC)
拟议的YOLC遵循与CenterNet类似的管道[16],但它与CenterNet的区别在于使用了不同的主干、检测头、回归方式和损失函数。特别是,HRNet[38]被用作生成高分辨率热图的骨干,这些热图更擅长检测小物体。此外,由于航空图像中物体的分布不平衡,设计了一种局部尺度模块(LSM)来自适应地搜索聚类区域。在检测到原始图像和裁剪后,在密集区域中,精确的结果直接替换为原始图像的结果。在后续章节中,我们将深入探讨YOLC中存在的模块的细节。
C. High-resolution Heatmap
为了提高在充满小物体的密集区域进行物体检测的准确性,YOLC使用了更高分辨率的热图。在CenterNet中,每个对象都被建模为其边界框中心的一个点,由热图中的高斯斑点表示。然而,相对于输入图像,热图被降采样了4倍。这种下采样可能会导致小物体在热图中只折叠成几个甚至一个点,从而难以准确定位它们的中心。为了解决这个问题,YOLC采用了一种经过修改pipeline,该pipeline使用了更高分辨率的热图。具体来说,我们添加了一个卷积层和两个转置卷积层,以将热图放大到与输入图像相同的大小。这使我们能够捕获有关小物体的更详细信息,从而在密集区域中实现更准确的物体检测。在解码之前应用高斯滤波器有助于减少CenterNet中的假阳性预测。过滤器平滑热图并抑制对象周围的多个峰值。这种方法有助于提高对象的定位精度,并减少误分类的机会。
D. Local Scale Module
候选兴趣区域方法是基于裁剪的对象检测模型的关键组成部分。然而,在航拍图像中,车辆和行人等物体往往聚集在几个聚集的区域。图像中的大多数区域都是背景,不需要检测。此外,密集区域的有限分辨率可能会导致检测性能显著下降。现有的基于作物的方法,如DMNet[13],可以生产许多作物或使用像ClusSet[12]这样的额外网络,导致检测速度低和模型参数增加。为了解决这些问题,我们提出了一种局部尺度模块(LSM),可以自适应地定位聚类区域。我们的LSM受到AutoScale的启发[39],但我们进行了一些修改,使其适用于航空图像。首先,我们的LSM不是只搜索单个最大聚类区域,而是通过对每个网格中的密度进行排序来定位前K个密集区域。这很重要,因为航空图像通常有多个聚类区域。其次,AutoScale是为人群计数和定位而设计的[40],[41],它只适用于具有单类对象的场景。然而,在航空图像中,有多个对象类别。我们还注意到,UCGNet[42]使用DBSCAN和K-Means等聚类方法从密集区域生成图像裁剪。然而,UCGNet产生的作物仍然很大,没有考虑不同作物之间的密度差异。
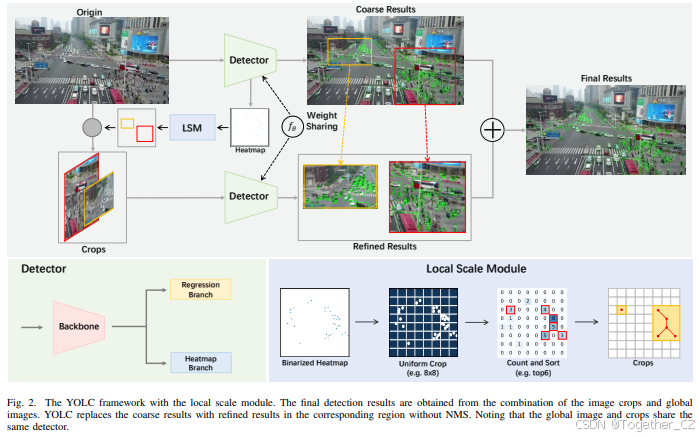
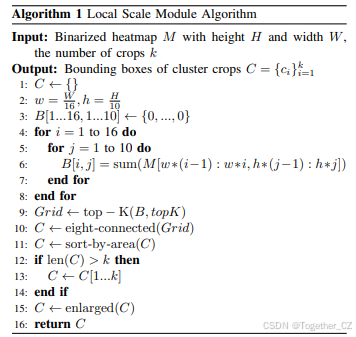
在下文中,我们将提供有关我们提出的LSM的更多细节,其结构如图2所示。为了生成候选区域,第一步是生成指示对象存在的二值图像。这是通过从每个图像的热图分支获得热图,然后使用经验阈值对热图进行二值化并生成位置掩模来实现的。然后将二值化热图划分为几个网格(例如16×10),并选择前K个(例如K=15)密集网格作为候选区域。对于VisDrone数据集,最好的超参数是Grid=(16,10)和top-K=50。为了确保捕获完整的对象,将八个相邻的密集网格组合成更大的候选区域,类似于[13]。然后将这些区域放大1.2倍以避免截断。最后,通过从原始图像中裁剪密集区域并调整其大小以适应检测器,获得k个图像块。完整的算法如算法1所示。为了加速检测并实现更高的性能改进,我们的目标是减少作物产量。我们为每张图像设置k=2,并关注更大的密集区域,因为对较大的作物进行精细检测可以带来更高的性能提升。在随后的实验中,观察到性能随着k从3增加而趋于饱和。因此,LSM利用极少数高质量作物进行精确检测,在检测速度和准确性之间取得了良好的平衡。此外,LSM是一个无监督的模块,可以很容易地集成到任何基于关键点的检测器中。
E. Loss Function
CenterNet[16]整合了三种损失以优化整个网络
F. Improved Detection Head
为了提高对航空图像中小目标的检测,回归分支通过可变形卷积进行了增强,因为它可以在卷积操作中自适应地调整采样位置,以更好地捕捉小细节。此外,为了更好地捕捉不同类别对象的精细细节,热图分支被解耦为多个子分支,每个子分支负责预测特定对象类别的热图。这不仅减轻了同时预测所有热图的计算负担,而且使网络能够专注于学习每个类别的不同特征,从而提高了探测器的整体性能。图3展示了经过这些改进的检测头的结构。
回归分支。在传统的物体检测器中,使用点特征来识别物体,导致预测不准确。为了克服这一局限性,我们在回归分支中采用了可变形卷积。与在固定的3×3网格上运行的常规卷积不同,可变形卷积动态调整采样点以适应对象的姿态和形状。具体来说,一个规则的3×3网格有9个采样点,定义为{(-1,-1),(-1,0),…,(1,1)},可变形卷积估计从规则采样点到动态采样点的偏移。
在我们的方法中,我们并行预测粗略的边界框和偏移场。为了确保卷积覆盖整个对象,我们将偏移限制在粗略的边界框内,并在其上应用可变形的卷积层。这将生成位置和大小更精确的精细边界框。当我们计算损失时,初始边界框和地面真值之间的损失由Lossinitial表示。同样地,我们可以计算关于精细边界框的Lossref ine(见图3)。
热图分支。受YOLOX[45]和DEKR[46]中使用的方法的启发,我们通过引入解耦结构来改进热图分支。该模型现在可以并行预测不同对象类别的热图,从而实现更高效、更准确的检测。具体来说,热图分支包括一个标准卷积、两个转置卷积和一个与C组的组卷积,其中每个组对应一个特定的对象类别。
EXPERIMENTS AND ANALYSIS
本节介绍了我们实验中使用的数据集、评估指标和实现细节。然后,我们进行消融研究,以验证所提出的模块、主干和损失功能的有效性。最后,我们从定性和定量的角度进行了比较实验,以证明我们的方法与最先进的方法相比的优越性。
A. Datasets
我们在两个公开的航空图像数据集上评估了我们的方法:VisDrone 2019[47]和UAVDT[48]。这两个数据集的详细信息如下:VisDrone[47]包括10209张高分辨率图像(约2000×1500像素),分为十类:行人、人、自行车、汽车、货车、卡车、三轮车、遮阳三轮车、公共汽车和汽车。该数据集包含6471张用于训练的图像、548张用于验证的图像和3190张用于测试的图像。由于评估服务器已关闭,在[12]、[13]之后,我们使用验证集进行评估。UAVDT[48]由38327张图像组成,平均分辨率为1080×540像素。该数据集包括三类,即汽车、公共汽车和卡车。该数据集包含23258张用于训练的图像和15069张用于测试的图像。
B. Evaluation Metrics
根据MS COCOCO[4]数据集的评估协议,我们使用AP、AP50和AP75作为我们的评估指标。AP表示所有类别的平均精度,而AP50和AP75表示在所有类别的IoU阈值0.5和0.75下计算的平均精度。此外,我们报告了每个对象类别的平均精度,以衡量每个类的性能。此外,为了衡量不同对象尺度的性能,我们采用了三个指标,即APsmall、APmedium和APlarge。最后,我们还通过测量每个GPU一个原始图像的处理时间来报告我们方法的效率。
C. Implementation Details
我们提出的方法是使用开源的MMDetection工具箱实现的,采用具有Hourglass-104[49]骨干网的CenterNet[16]作为基线方法。该模型使用动量为0.9、权重衰减为0.0001的SGD优化器训练了160个迭代周期。它在GeForce RTX 2080 Ti GPU平台上运行,批量大小为2。通过线性预热将初始学习率设置为0.01。两个数据集的输入分辨率都设置为1024×640。

D. Experimental Results
表一和表二分别显示了VisDrone[47]和UAVDT[48]数据集上与最先进方法的定量比较。结果表明,我们提出的模型在两个数据集上始终优于其他方法。值得注意的是,在VisDrone[47]上,由于航空图像中存在大量小物体实例和不均匀的数据分布,Faster R-CNN[1]和CenterNet[16]等通用物体探测器的性能不佳。然而,无锚检测模型(即CenterNet[16])的性能优于基于锚的检测方法(即Faster RCNN[1]),这与前面提到的分析是一致的。
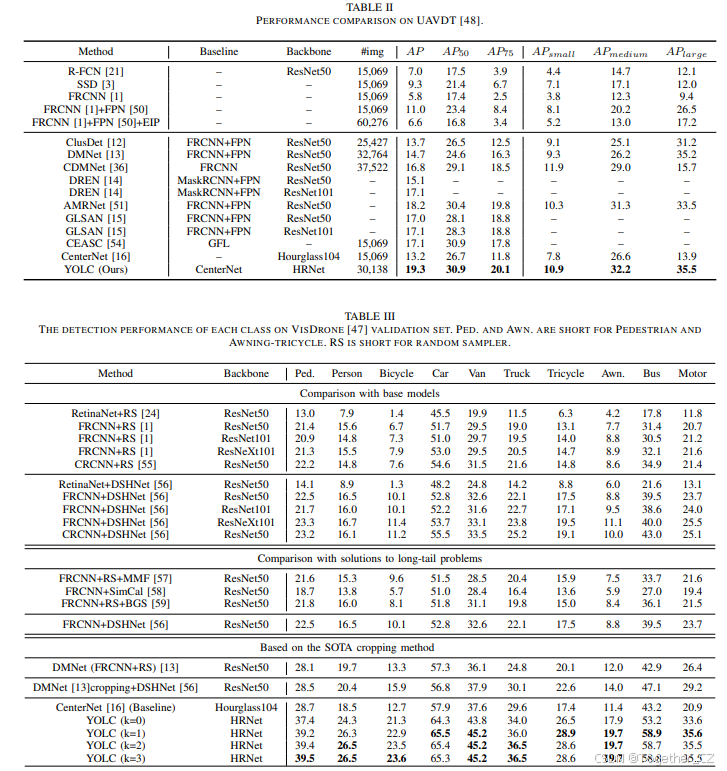
即使不使用LSM,我们提出的YOLC也优于现有的方法,如ClusSet[12]和DMNet[13]。然而,在加入LSM后,性能得到了进一步的提升。通过使用优化方案,我们实现了38.3 AP的最佳性能。我们还使用多尺度测试评估了检测结果,这使AP进一步提高了1.8%。值得注意的是,我们提出的YOLC显著提高了小型物体的检测性能,而中型和大型物体的改进并不明显。这是可以接受的,因为小物体在航空图像中占大多数,提高它们的检测能力可以显著提高整体性能。此外,我们提出的方法以相对较少的处理图像(#img)、较高的推理速度(s/img)和参数较少的更简单框架实现了最佳检测结果。这表明了我们方法的有效性和效率。如表II所示,对UAVDT数据集的性能评估揭示了与VisDrone[47]数据集类似的结论。它表明,一般的物体检测器无法达到令人满意的检测结果,而我们提出的YOLC优于最先进的模型,并在19.3的AP下实现了最高的性能。值得注意的是,YOLC不断提高小型、中型和大型物体的准确性,这验证了我们专用检测框架的有效性。
我们在表三中进一步分析了VisDrone[47]上的按类别的AP。我们提出的YOLC在很大程度上始终优于基本模型,包括RetinaNet[24]、Faster R-CNN[1]和Cascade R-CNN[55],特别是对于行人和人等小物体。然而,我们观察到,与自行车和遮阳篷自行车等其他类别相比,汽车和公共汽车等类别的检测性能更好,这可能是由于数据集中严重的类别不平衡造成的。已经提出了几种方法来解决这个问题,包括重新采样[60]、[61]、重新加权[62]、重新平衡[63]、[64]和两阶段训练范式[56]、[58]。尽管没有关注长尾问题,但与为长尾问题设计的几个模型相比,我们的方法在所有类别中仍然取得了最高的性能,如表三所示。
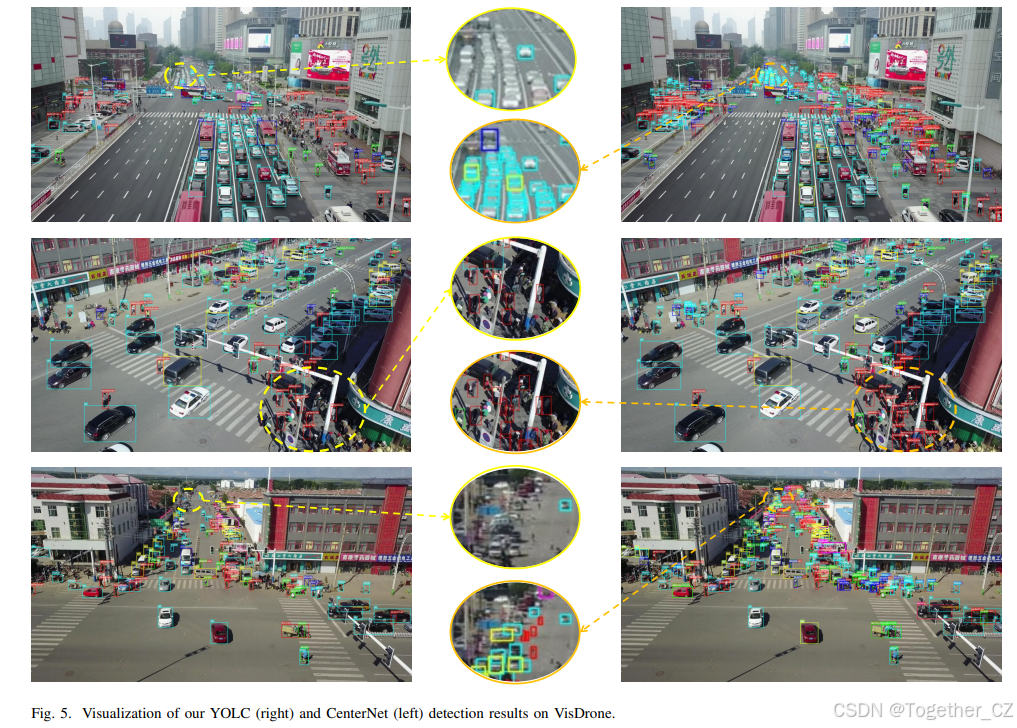
此外,我们在图4中可视化了两个数据集的检测结果。从这些可视化结果中,我们可以观察到我们提出的方法实现了有前景的检测精度。特别是,我们的方法可以检测到许多普通探测器很容易错过的小物体,如第二列中的图像所示。此外,我们的方法可以获得非均匀分布物体的准确检测结果,如第一行第三幅图像所示。此外,我们在图5中将YOLC的结果与CenterNet进行了比较。YOLC可以比CenterNet更准确地检测密集区域中的对象,特别是小对象。
E. Ablation Study
为了证明我们模型中组件的有效性,我们在VisDrone上进行了消融实验[47]。在我们的框架中,LSM是关键组件,在整体性能方面表现出最显著的改进。
•不同的骨干。为了增强对航空图像中小物体的检测,我们用高分辨率网络HRNet[38]取代了CenterNet[16]中的沙漏骨干网。表I显示,这种简单的修改使性能提高了1.3%,证明了使用HRNet提取更稳健特征的有效性,特别是对于小对象。因此,在我们后续的实验中,我们使用HRNet作为骨干网络。
•LSM的影响。我们提出了一个LSM模块来解决非均匀分布问题。如表I所示,我们观察到,当裁剪聚类区域的数量设置为k=1时,性能提高了2.2%。值得注意的是,小物体的性能提升更为显著,提高了3.3%。然而,随着k的增加,性能改进达到饱和。当k=2和k=3时,我们观察到APsmall的进一步改善分别为0.3%和0.1%。因此,为了充分利用LSM模块的优势,我们在后续实验中设置k=3。
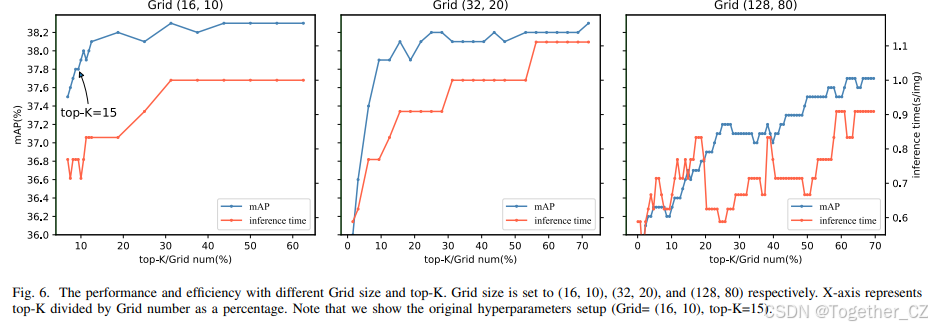
•LSM中的超参数。我们展示了LSM中两个超参数Grid和top-K的消融(见图6)。Grid表示网格的大小,top-K表示候选区域的数量。特别地,我们观察到初始超参数配置不是最优的。当Grid为(16,10)且top-K超过Grid总数的30%时,可以获得最佳结果,达到38.3%mAP。
•不同的损失函数。为了优化所提出的YOLC网络,我们对回归损耗进行了几处修改。具体来说,我们用GWD损耗[19]替换了原始的L1损耗,并尝试了基于IoU的损耗,如GIoU[43]、DIoU[44]和CIoU[46]。我们还使用了修改后的GIoU损耗来调整我们的无锚探测器[52]。选择这些损失是为了解决对规模变化的敏感性以及度量和损失之间的不一致性。这些实验的结果如表四所示。当使用替代回归损失时,我们观察到AP的性能进一步提高了0.4%和0.8%,APsmall的性能提高了0.5%和0.9%。然而,APmedium和APlarge下降了。根据第III-E节的分析,我们发现GWD+L1损失缓解了这一现象,APsmall进一步改善了1.3%。
•细化模块的效果。为了进一步提高YOLC网络在小对象上的性能,我们引入了一个可变形的卷积模块来细化回归头。该模块可以动态提取点特征,为每个对象生成更精确的表示。表V表明,所提出的可变形卷积将AP75提高了1.4%,表明边界框回归实现了更高的定位精度。此外,所有评估指标都显示出一致的改进,对于较大的对象观察到更大的增益。这种改进可以归因于可变形卷积能够更好地捕获整个对象,特别是对于传统卷积可能难以覆盖对象整体的大型对象。
•解耦热图分支的影响。为了提高对象定位的准确性,我们将热图分支拆分为并行分支,其中每个分支独立地为相应的对象类别生成热图。表VI中的结果表明,这种方法在所有评估指标上都取得了一致的改进,验证了解耦热图的有效性。值得注意的是,APsmall进一步提高了0.4%,表明该技术对于检测小物体特别有效。
CONCLUSIONS
本文介绍了YOLC框架,这是一种无锚网络,旨在解决空中目标检测中的两个具有挑战性的问题:检测小目标和处理严重不均匀的数据分布。为了解决前一个问题,我们提出了一种基于CenterNet的改进模型,该模型使用转置卷积输出高分辨率特征图,并解耦热图以学习不同对象类别的专用表示。这种方法显著提高了检测性能,特别是对于小物体。对于后一个问题,我们引入了一个局部缩放模块,该模块自适应地搜索聚类对象区域并对其进行重新缩放,以更好地适应对象检测器。为了进一步提高网络的性能,我们采用基于GWD的损耗函数来代替原始CenterNet中的尺寸回归损耗,该模型将模型集中在小对象上。为了弥补上述损失造成的大型物体性能下降,我们建议使用L1损失来辅助GWD损失。此外,我们利用可变形模块来细化边界框回归。我们的框架通过LSM平衡了准确性和速度。与最先进的方法相比,我们通过在两个航空图像数据集上进行的广泛实验证明了我们的方法的有效性和优越性。在未来的工作中,我们将努力将我们的方法扩展到特征级别,用于微小目标检测。例如,该模型可以直接学习放大图像的特征,而不是将放大图像输入骨干网络以获得特征。



















 3381
3381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











