






地图服务与AMCL定位
costmap(代价地图)
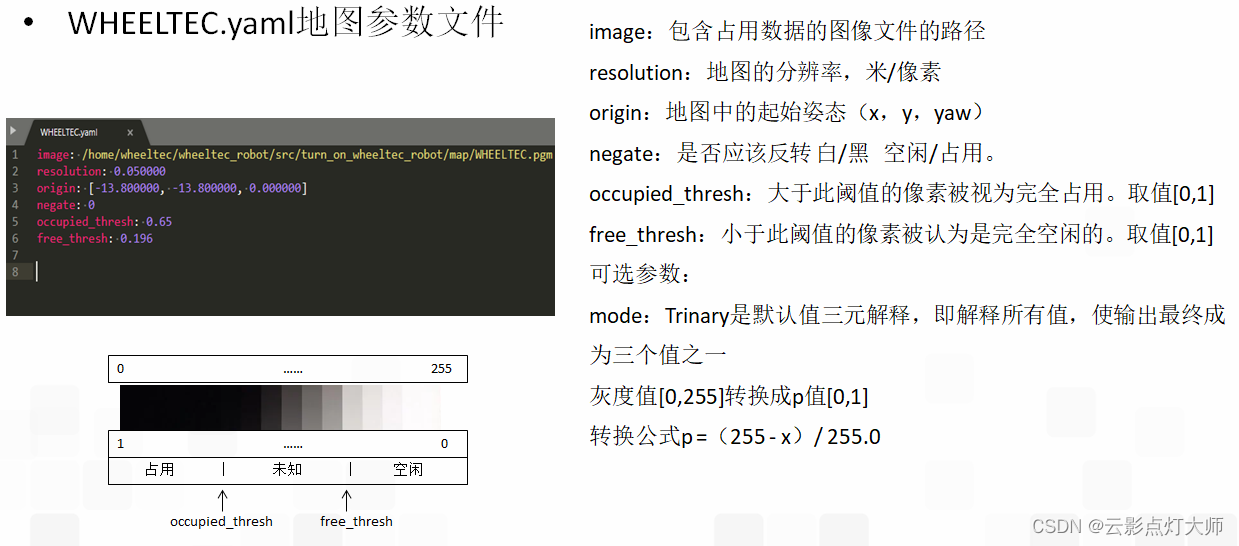
1.地图文件格式:除了pgm(便携式灰度图)外,还支持jpg、png等常用图片格式,还可以用画图工具修改或重画地图:
2.地图参数文件
 3.地图膨胀
3.地图膨胀
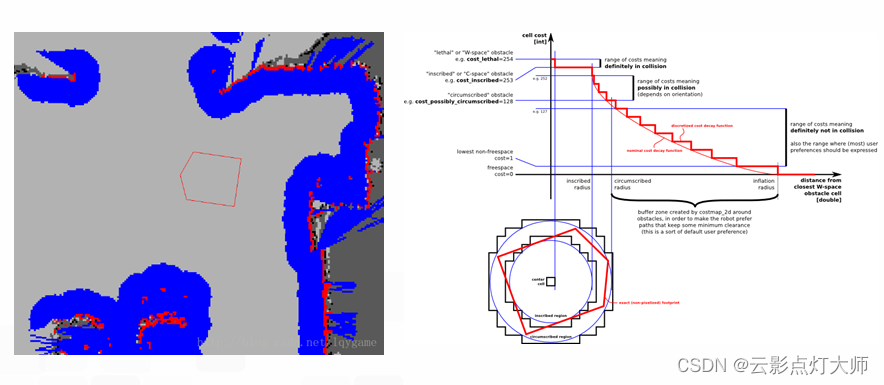
地图膨胀,为了保护小车以免遭受碰撞。红色是障碍物,蓝色是按照一定的半径膨胀出来的。代价地图就是要保证小车与障碍物不发生碰撞。
官方提供了三种碰撞情况:最严重的是小车中心与红色相交,一定会发生碰撞。第二是障碍物以小车的内切圆为半径膨胀,小车的中心也不能蓝色部分相交,否则也一定会发生碰撞。第三是障碍物以小车的外接圆为半径膨胀,这时小车中心与蓝色部分相交,有可能发生碰撞。
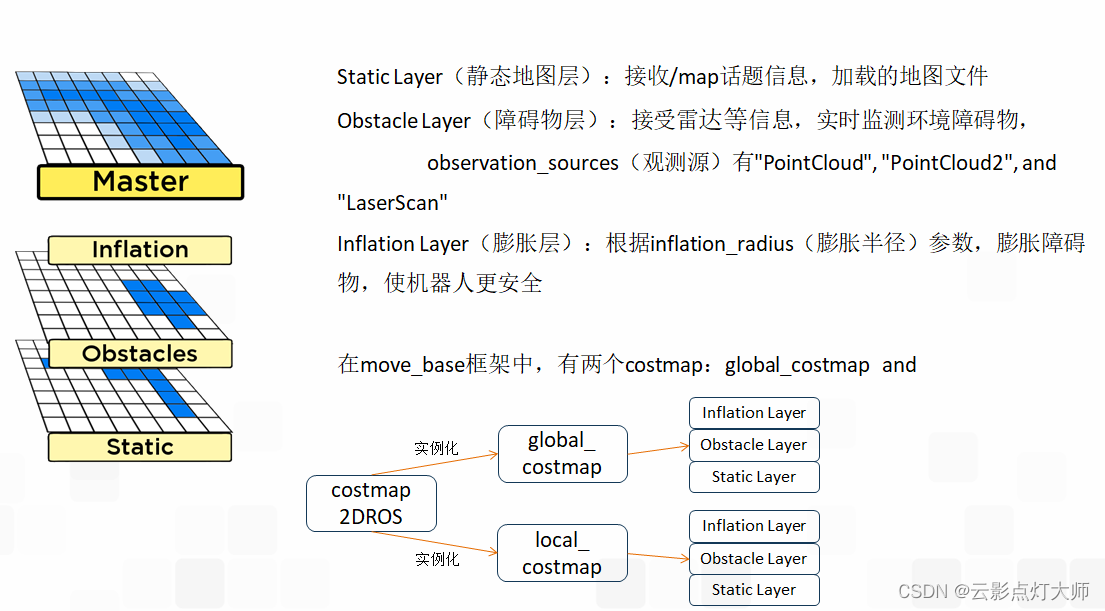
三层地图来组成代价地图,代价地图又分为全局代价地图和局部代价地图
 4.恢复行为
4.恢复行为
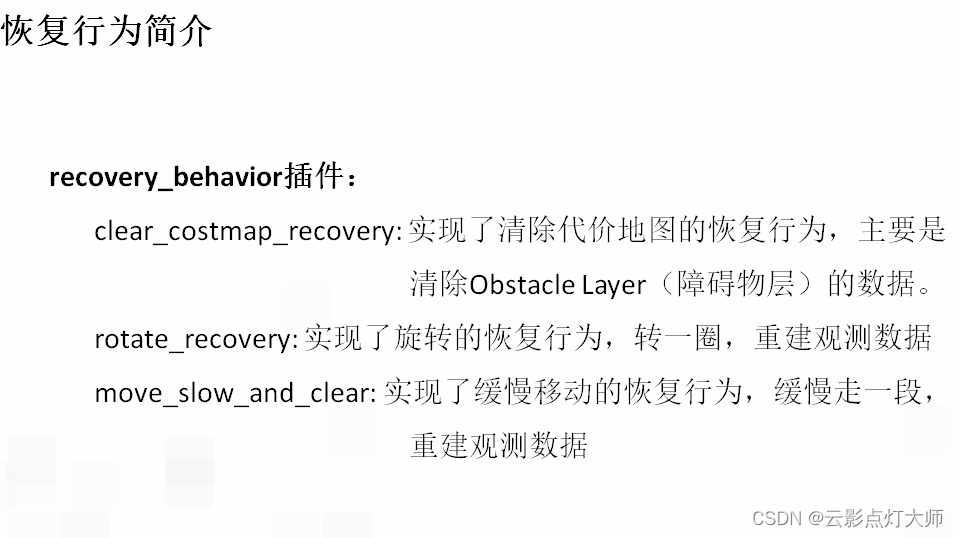
当物体运动的导航路线受阻的时候,会触发这个插件的功能,来对导航路线进行调整,如果调整失败,会结束导航。
AMCL定位(自适应蒙特卡罗定位)
解决的问题是目前自己所处地图的位置,利用的是粒子滤波算法。
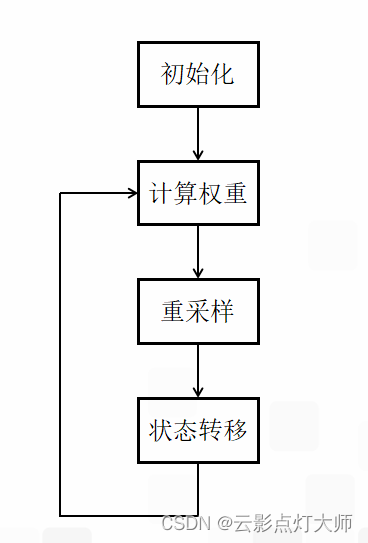
粒子滤波:初始化.计算权重.重采样.状态转移.
1.初始化
产生N个位置假设。(采样)随机分布,我们叫它们为粒子。
 2.计算权重
2.计算权重
通过传感器收集到的数据(一般是激光雷达),来估算每个粒子位置的可能性。对可能性较大的粒子位置赋比较大的权重
3.重采样
重新撒点,跟初始化不同的是每个位置撒点的可能性是不一样的,依照的是上一步权重。权重越大,可能性越高,重采样中的粒子也集中在这些地方。所以重采样的新粒子会出现在旧粒子权重大的地方。现在由于所有的粒子是新采样得到的,所以每个粒子又都是相同的权重了。
 4.状态转移阶段
4.状态转移阶段
物体继续运动,粒子也跟着一起运动,再进行计算权重,重采样…
不断循环这个过程。
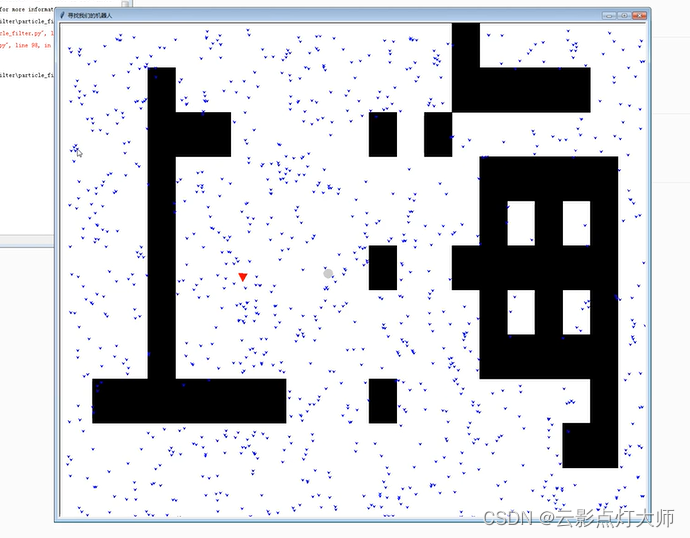
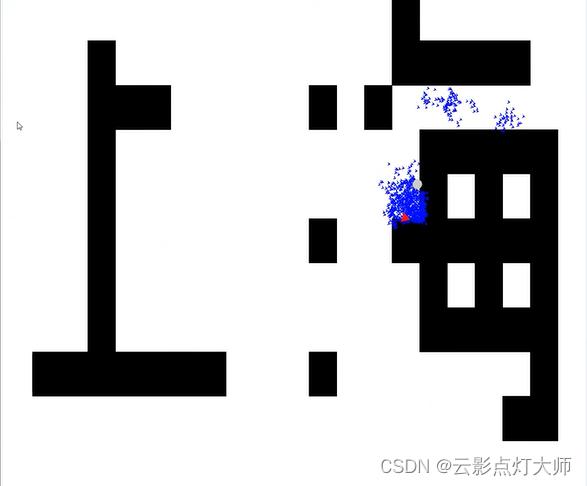
移动1
开始移动
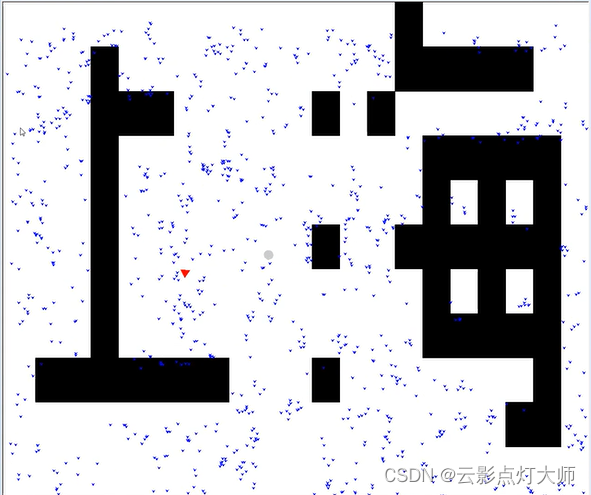
移动2
开始集中

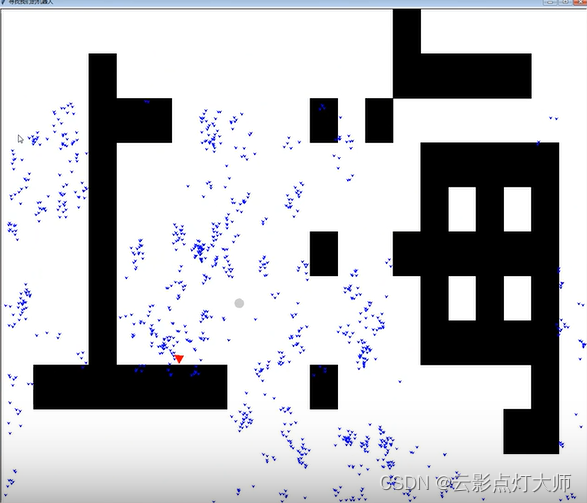
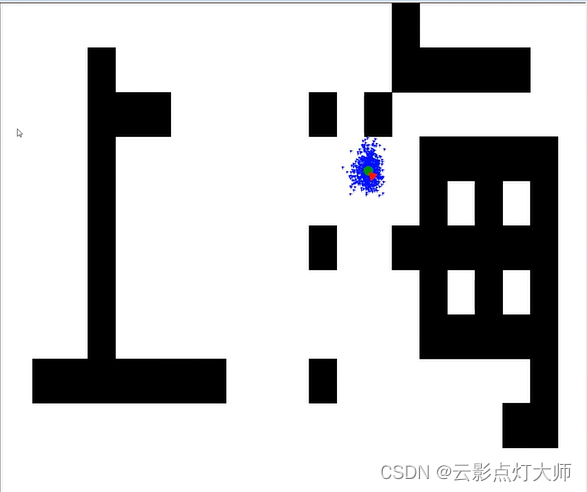
移动3
越来越集中
移动4
粒子集中在一团,然后就能估算出物体的实际位置。
有问题可以私聊我咯~
可以加企鹅群 658476482 交流
另外承接各种单片机 FPGA设计~
















 1519
1519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











