







前言
plot3d函数是将STL格式的零件在MATLAB中真实地显示出来,而STL格式的零件也是由三维软件设计后转换而来。一般情况下设计师会根据各自的习惯设计零件,最后零件的造型虽是一样的,但基坐标的建立各不相同。设计师并不会按照标准DH参数的坐标系去设计,因此在你拿来别人的模型进行使用时,导入到MATLAB会发现零部件都是散的,不是一个整体,所以更改零件基坐标系是关键的一步,以ABB120的solidworks模型为例。
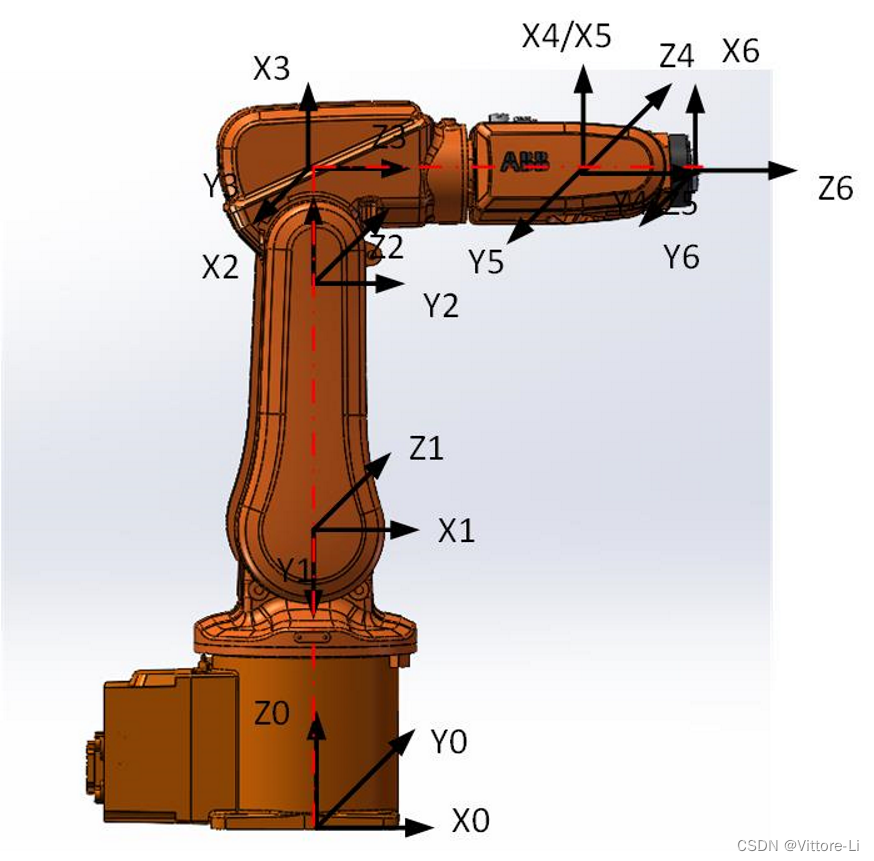
一、创建标准DH参数坐标系(必须是标准型)
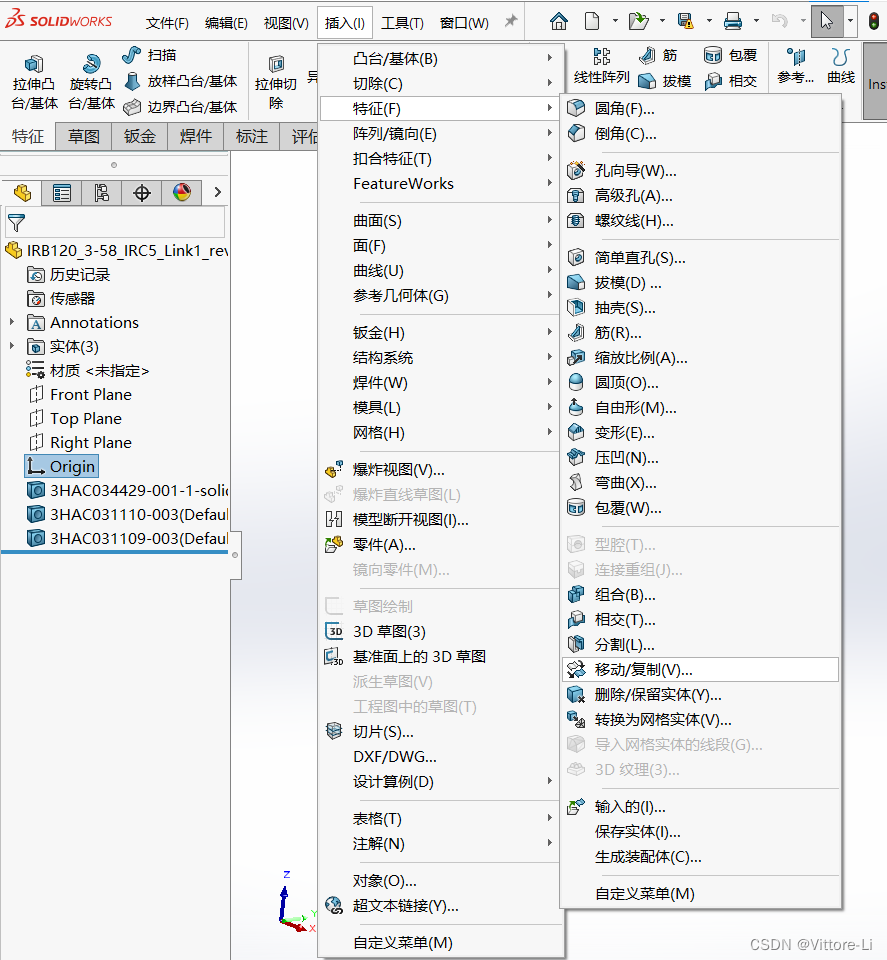
二、在Solidworks中更改零件基坐标系
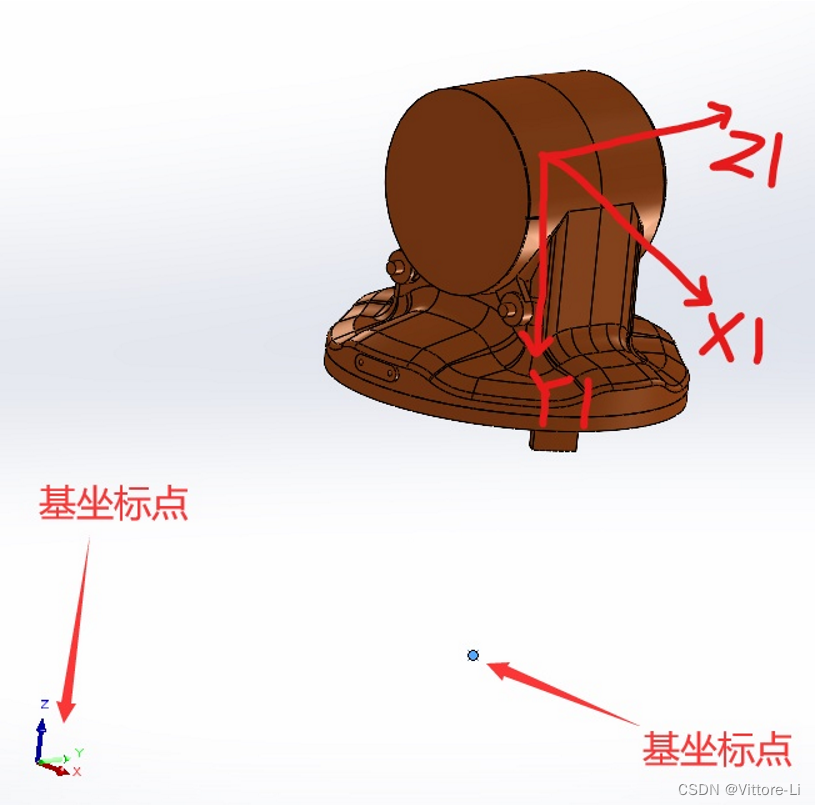
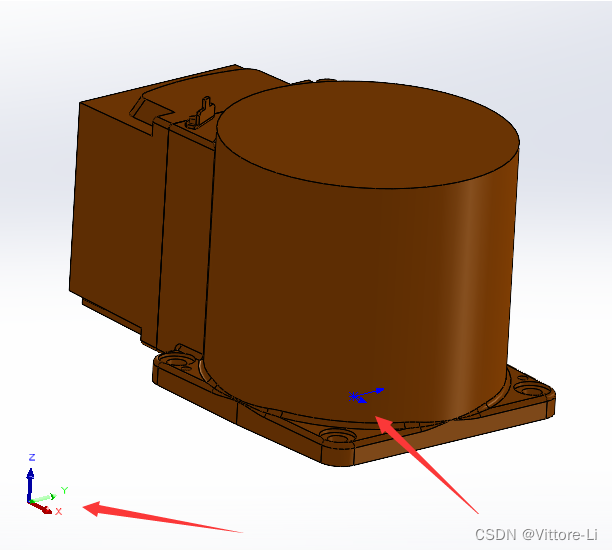
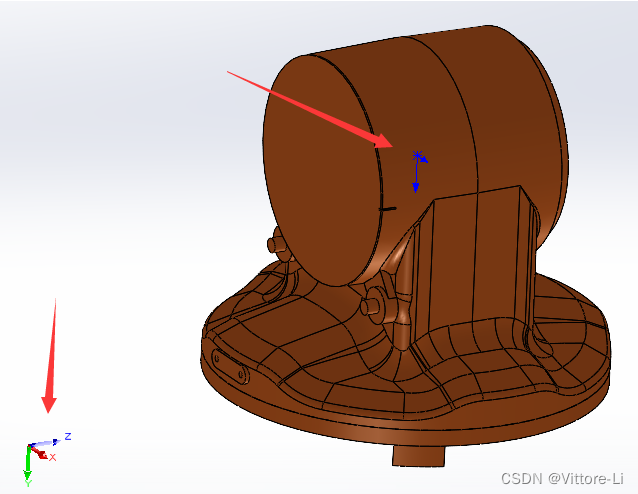
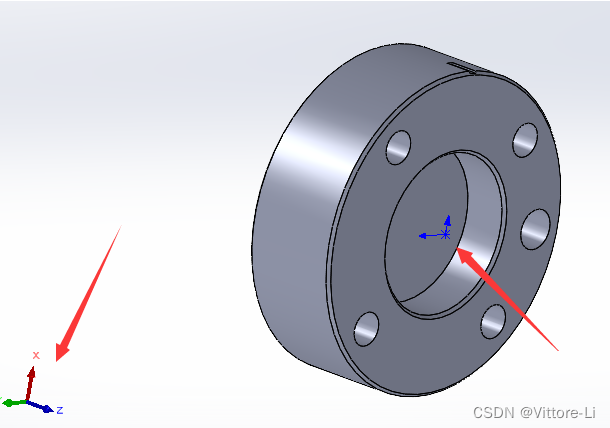
以机器人转座为例,记住我们要确定的方向(X1、Y1、Z1),此时我们基坐标的坐标轴如图所示,那个点和我们需要的不仅坐标系方向有差别,位置也有差别。
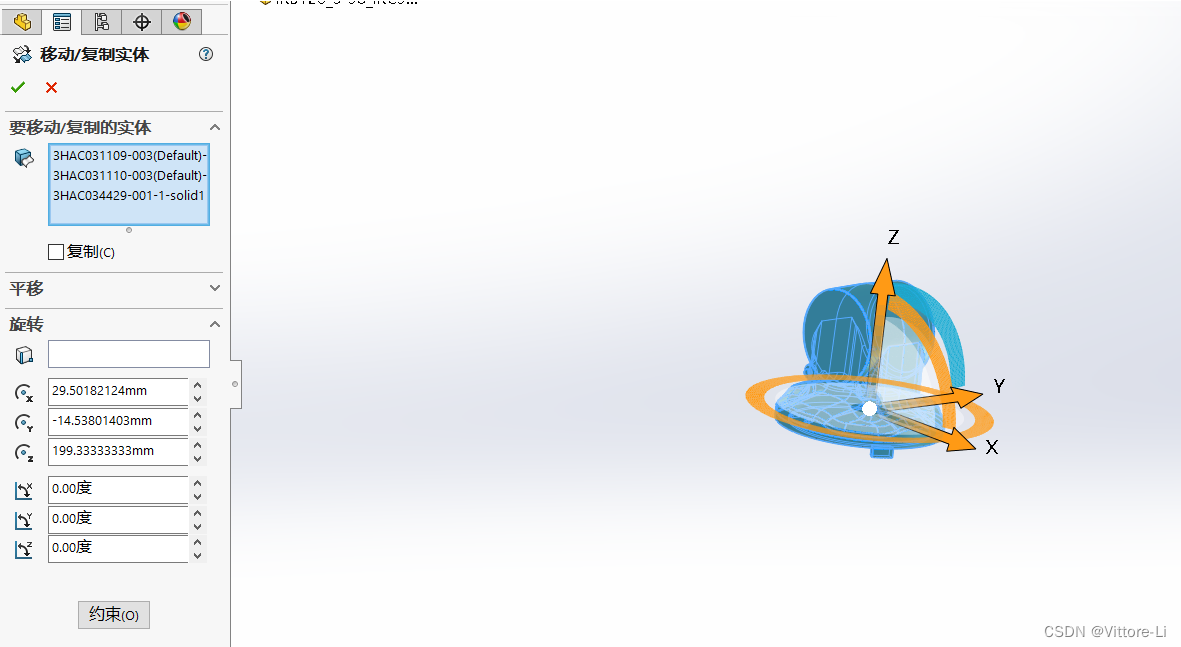
在顶栏处打开插入-特征-移动/复制,全选中实体,自己计算一下需要朝哪个方向移动,需要转动哪根轴(需要熟悉DH参数建模),其中距离测量可以通过参考面、参考线等方法创建参考点(即X1、Y1、Z1交点),测量参考点与基坐标点距离,旋转方向按照DH旋转方向反向进行(比如轴1连杆转角-pi/2,那这里设置成零件绕X轴旋转90度)
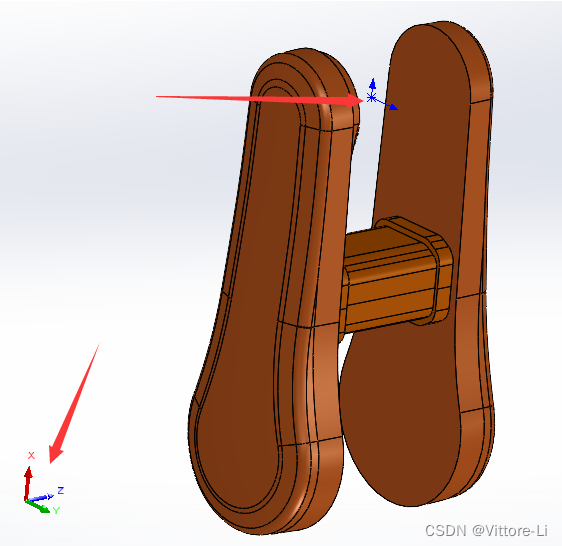
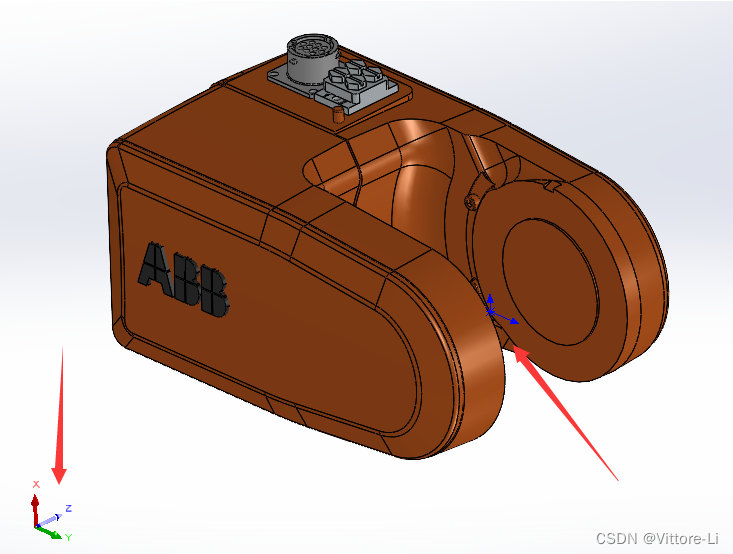
按照上述方法得到机器人7个部件坐标系如图所示,与DH模型坐标系相同即可。


















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











