







文章目录
前言
版本要求:
Ubuntu22.04 LTS + ROS2-Humble
一、UR功能包配置
1.开启终端创建工作空间
mkdir ur5e_ws
cd ur5e_ws
mkdir src
cd src
2.下载相应版本驱动和安装包
git clone https://github.com/UniversalRobots/Universal_Robots_ROS2_Driver.git -b humble
git clone https://github.com/UniversalRobots/Universal_Robots_ROS2_Description.git -b humble
git clone https://github.com/UniversalRobots/Universal_Robots_ROS2_Gazebo_Simulation.git
3.编译安装包
cd ..
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
echo "source ~/ur5e_ws/install/local_setup.sh">>~/.bashrc
二、功能包仿真测试
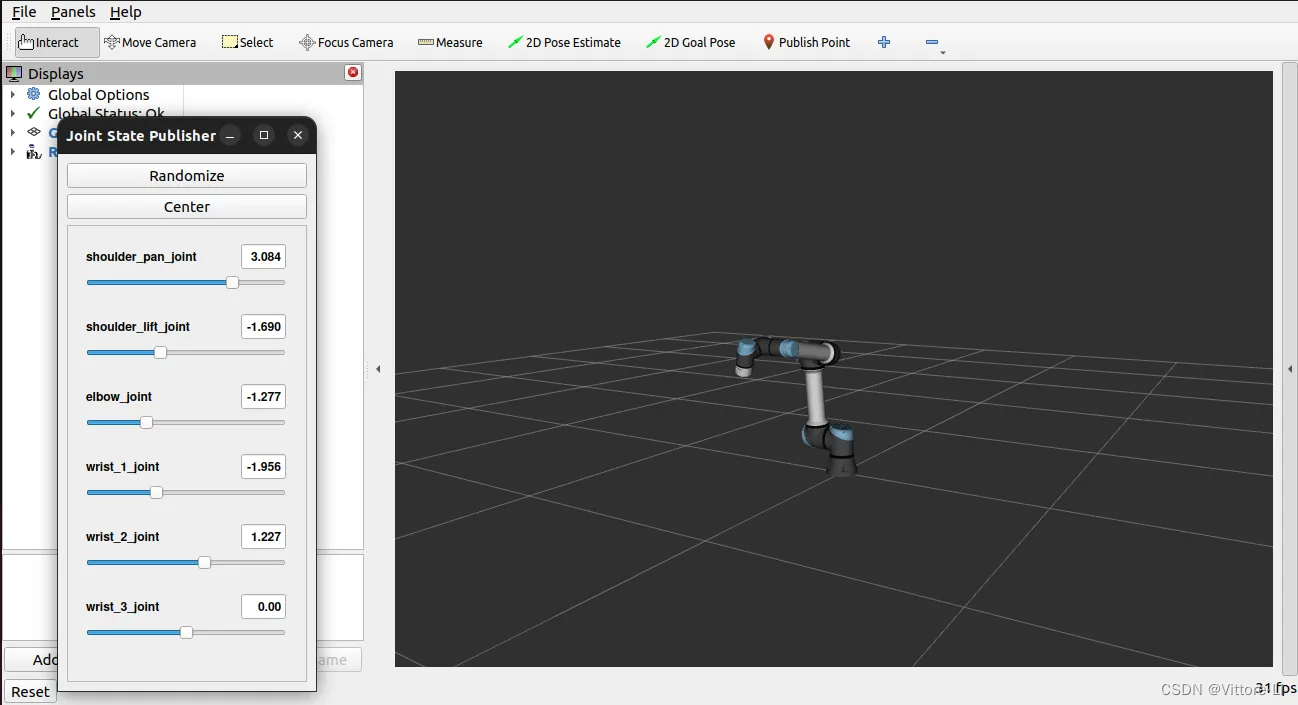
1.description功能包手动示教仿真测试
source install/setup.bash
ros2 launch ur_description view_ur.launch.py ur_type:=ur5e
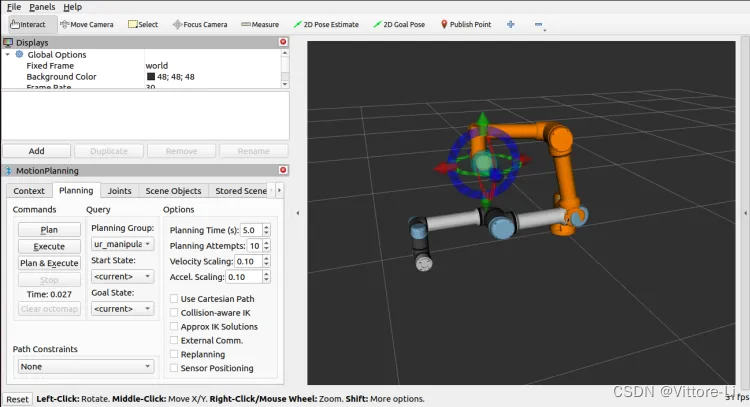
2.moveit_config功能包Rviz-Moveit拖动示教仿真测试
source install/setup.bash
ros2 launch ur_moveit_config ur_moveit.launch.py ur_type:=ur5e launch_rviz:=true
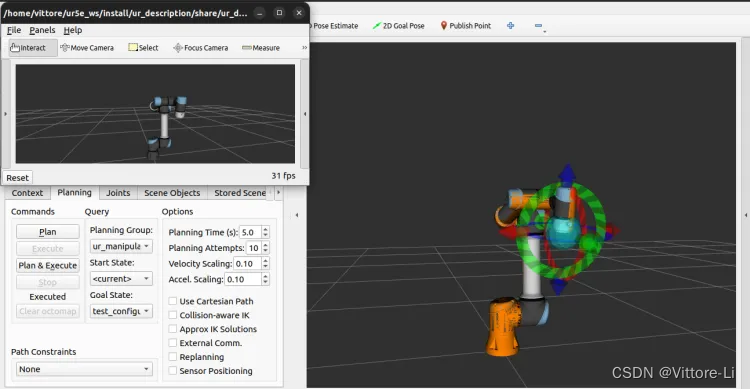
3.driver功能包仿真测试
终端1:
source install/setup.bash
ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur5e robot_ip:=192.168.56.1 use_fake_hardware:=true launch_rviz:=true
终端2:
source install/setup.bash
ros2 launch ur_moveit_config ur_moveit.launch.py ur_type:=ur5e launch_rviz:=true
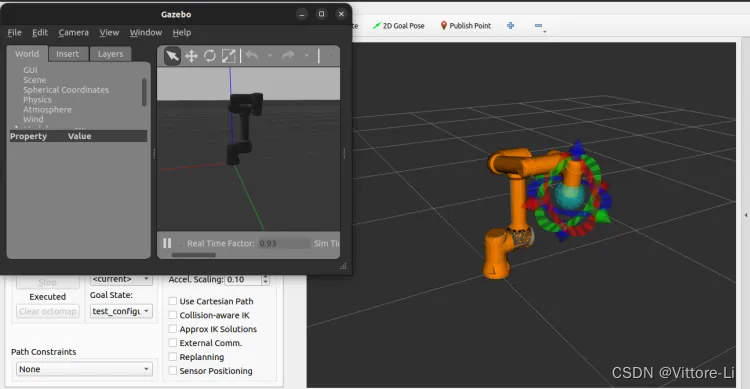
4.MoveIt+Gazebo仿真
source install/setup.bash
ros2 launch ur_simulation_gazebo ur_sim_moveit.launch.py
















 5757
5757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











