







如果没使用不过Automation Studio 4.10软件,想要控制一个电机可能无从下手,那就练习一个小demo,熟悉熟悉使用程序控制贝加莱电机吧。
1.创建电机驱动的plc工程,在上一篇文章中已经说明,连接如下:
基于Automation Studio 4.10贝加莱PLC 电机驱动操作——新建工程
2.程序控制
2.2 例子控制程序
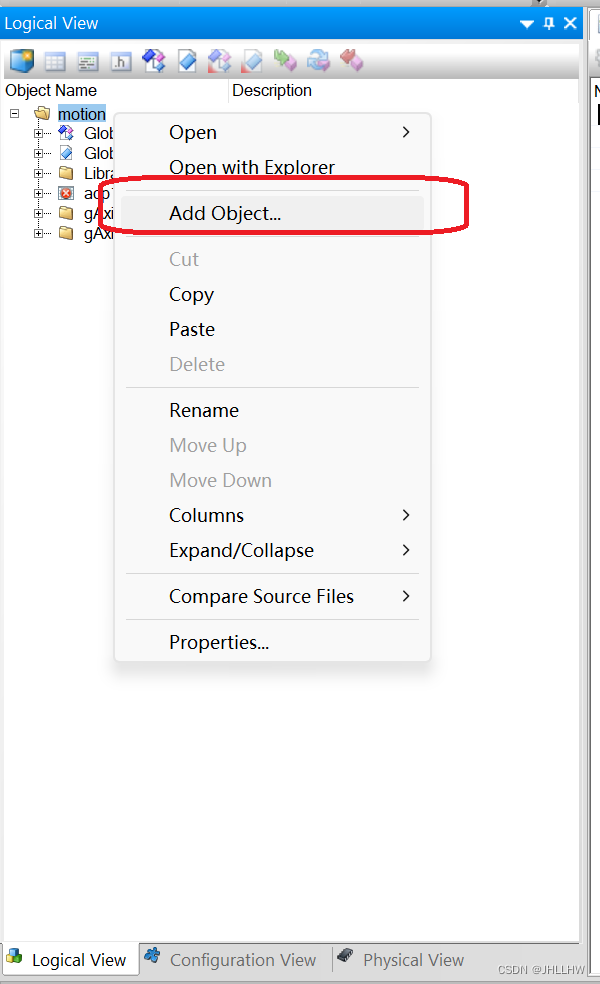
2.2.1 添加例程控制程序sample,新建用户程序文件夹,右击程序工程motion->add boject->package->双击“package empey”

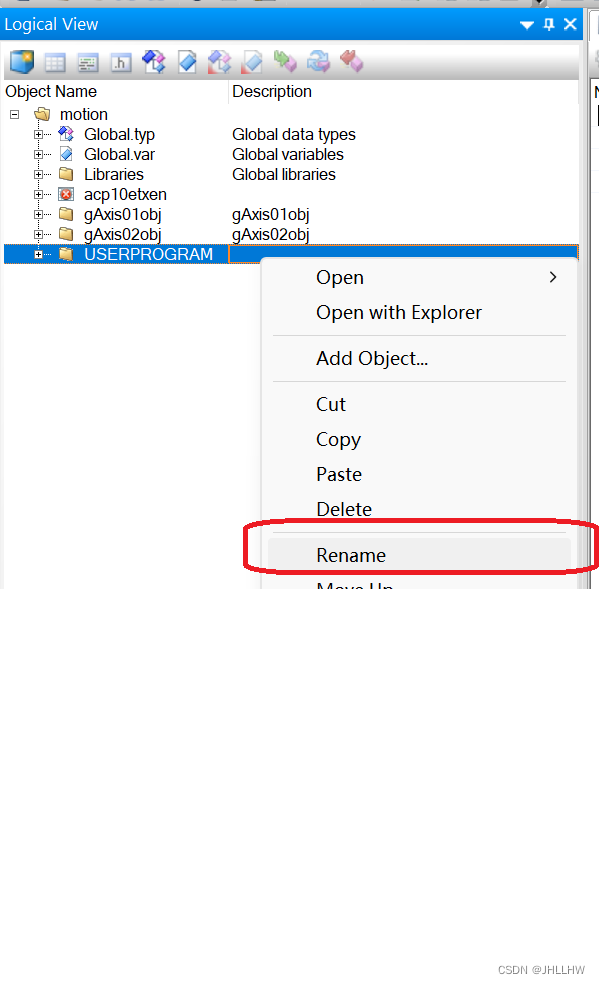
2.2.2 重命名新建文件夹PACKAGE->USERPROGRAM
2.2.3添加轴控例子程序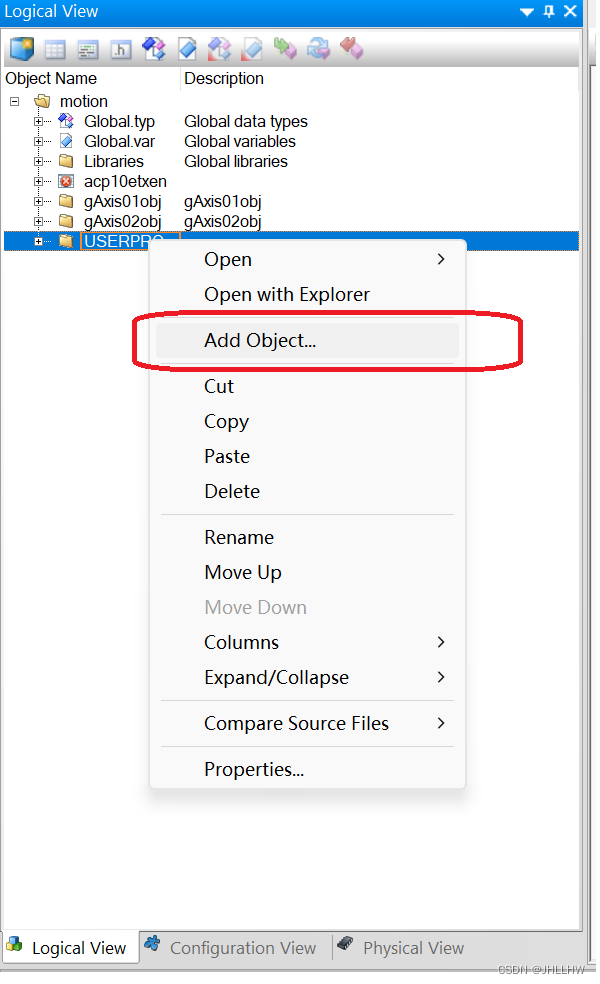
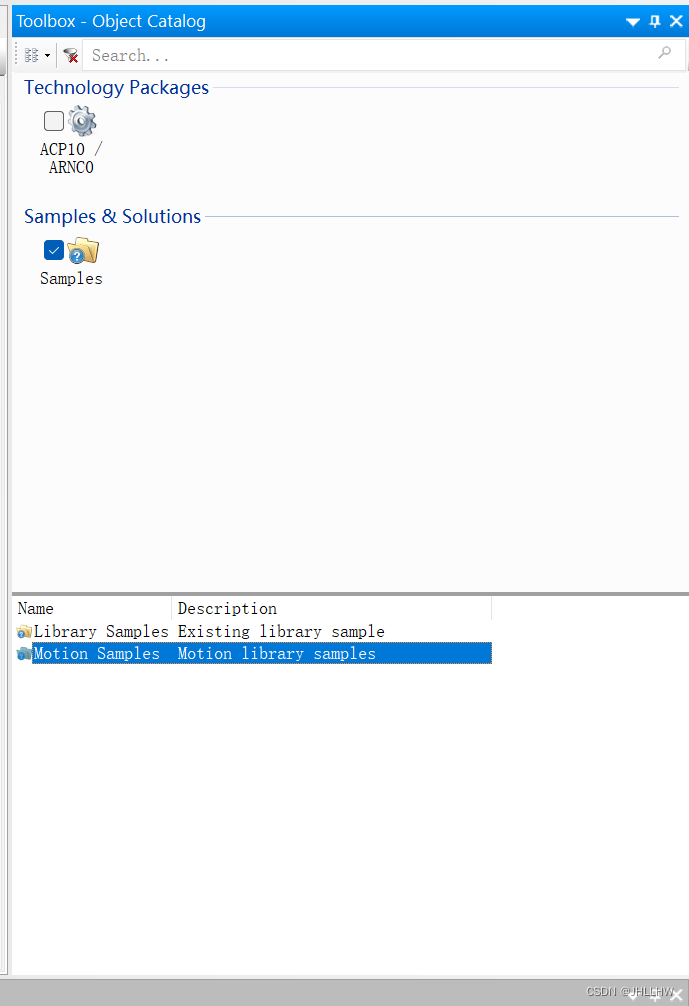
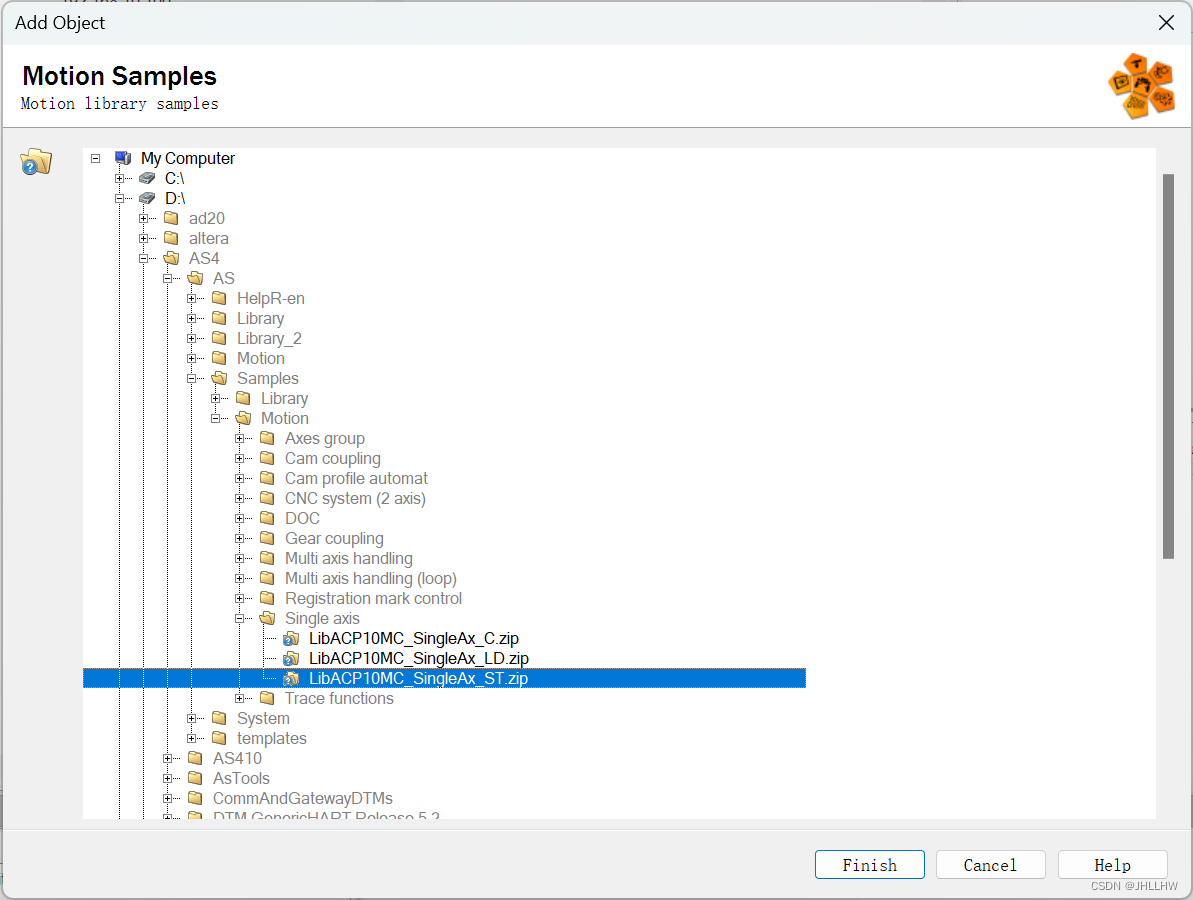
2.2.4添加轴控例子程序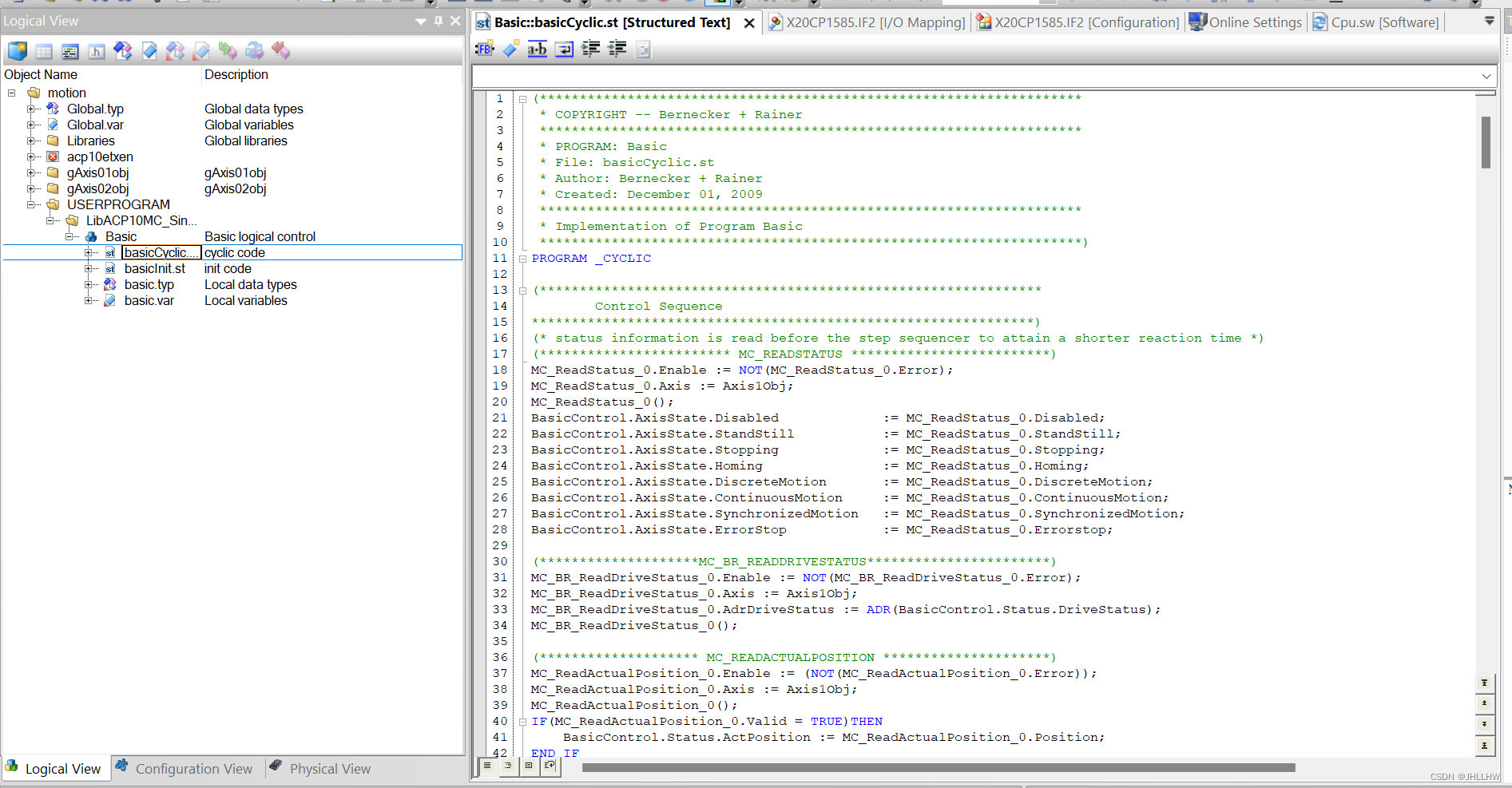
2.2.5控制程序如下
(********************************************************************
* COPYRIGHT -- Bernecker + Rainer
********************************************************************
* PROGRAM: Basic
* File: basicCyclic.st
* Author: Bernecker + Rainer
* Created: December 01, 2009
********************************************************************
* Implementation of Program Basic
********************************************************************)
PROGRAM _CYCLIC
(***************************************************************
Control Sequence
***************************************************************)
(* status information is read before the step sequencer to attain a shorter reaction time *)
(************************ MC_READSTATUS *************************)
MC_ReadStatus_0.Enable := NOT(MC_ReadStatus_0.Error);
MC_ReadStatus_0.Axis := Axis1Obj;
MC_ReadStatus_0();
BasicControl.AxisState.Disabled := MC_ReadStatus_0.Disabled;
BasicControl.AxisState.StandStill := MC_ReadStatus_0.StandStill;
BasicControl.AxisState.Stopping := MC_ReadStatus_0.Stopping;
BasicControl.AxisState.Homing := MC_ReadStatus_0.Homing;
BasicControl.AxisState.DiscreteMotion := MC_ReadStatus_0.DiscreteMotion;
BasicControl.AxisState.ContinuousMotion := MC_ReadStatus_0.ContinuousMotion;
BasicControl.AxisState.SynchronizedMotion := MC_ReadStatus_0.SynchronizedMotion;
BasicControl.AxisState.ErrorStop := MC_ReadStatus_0.Errorstop;
(********************MC_BR_READDRIVESTATUS***********************)
MC_BR_ReadDriveStatus_0.Enable := NOT(MC_BR_ReadDriveStatus_0.Error);
MC_BR_ReadDriveStatus_0.Axis := Axis1Obj;
MC_BR_ReadDriveStatus_0.AdrDriveStatus := ADR(BasicControl.Status.DriveStatus);
MC_BR_ReadDriveStatus_0();
(******************** MC_READACTUALPOSITION *********************)
MC_ReadActualPosition_0.Enable := (NOT(MC_ReadActualPosition_0.Error));
MC_ReadActualPosition_0.Axis := Axis1Obj;
MC_ReadActualPosition_0();
IF(MC_ReadActualPosition_0.Valid = TRUE)THEN
BasicControl.Status.ActPosition := MC_ReadActualPosition_0.Position;
END_IF
(******************** MC_READACTUALVELOCITY *********************)
MC_ReadActualVelocity_0.Enable := (NOT(MC_ReadActualVelocity_0.Error));
MC_ReadActualVelocity_0.Axis := Axis1Obj;
MC_ReadActualVelocity_0();
IF(MC_ReadActualVelocity_0.Valid = TRUE)THEN
BasicControl.Status.ActVelocity := MC_ReadActualVelocity_0.Velocity;
END_IF
(************************ MC_READAXISERROR **********************)
MC_ReadAxisError_0.Enable := NOT(MC_ReadAxisError_0.Error);
MC_ReadAxisError_0.Axis := Axis1Obj;
MC_ReadAxisError_0.DataAddress := ADR(BasicControl.Status.ErrorText);
MC_ReadAxisError_0.DataLength := SIZEOF(BasicControl.Status.ErrorText);
MC_ReadAxisError_0.DataObjectName := 'acp10etxen';
MC_ReadAxisError_0();
(**************** CHECK FOR GENERAL AXIS ERROR ******************)
IF ((MC_ReadAxisError_0.AxisErrorID <> 0) AND (MC_ReadAxisError_0.Valid = TRUE)) THEN
AxisStep := STATE_ERROR_AXIS;
(***************** CHECK IF POWER SHOULD BE OFF *******************)
ELSIF ((BasicControl.Command.Power = FALSE) AND (MC_ReadAxisError_0.Valid = TRUE)) THEN
IF ((MC_ReadStatus_0.Errorstop = TRUE) AND (MC_ReadStatus_0.Valid = TRUE)) THEN
AxisStep := STATE_ERROR_RESET;
ELSE
AxisStep := STATE_WAIT;
END_IF
END_IF
(* central monitoring OF stop command attains a shorter reaction TIME in CASE OF emergency stop *)
(******************CHECK FOR STOP COMMAND************************)
IF (BasicControl.Command.Stop = TRUE) THEN
IF ((AxisStep >= STATE_HOME) AND (AxisStep <= STATE_ERROR)) THEN
(* reset all FB execute inputs we use *)
MC_Home_0.Execute := 0;
MC_Stop_0.Execute := 0;
MC_MoveAbsolute_0.Execute := 0;
MC_MoveAdditive_0.Execute := 0;
MC_MoveVelocity_0.Execute := 0;
MC_ReadAxisError_0.Acknowledge := 0;
MC_Reset_0.Execute := 0;
MC_Halt_0.Execute := 0;
(* reset user commands *)
BasicControl.Command.Halt := 0;
BasicControl.Command.Home := 0;
BasicControl.Command.MoveJogPos := 0;
BasicControl.Command.MoveJogNeg := 0;
BasicControl.Command.MoveVelocity := 0;
BasicControl.Command.MoveAbsolute := 0;
BasicControl.Command.MoveAdditive := 0;
AxisStep := STATE_STOP;
END_IF
END_IF
CASE AxisStep OF
(******************** WAIT *************************)
STATE_WAIT: (* STATE: Wait *)
IF (BasicControl.Command.Power = TRUE) THEN
AxisStep := STATE_POWER_ON;
ELSE
MC_Power_0.Enable := FALSE;
END_IF
(* reset all FB execute inputs we use *)
MC_Home_0.Execute := FALSE;
MC_Stop_0.Execute := FALSE;
MC_MoveAbsolute_0.Execute := FALSE;
MC_MoveAdditive_0.Execute := FALSE;
MC_MoveVelocity_0.Execute := FALSE;
MC_Halt_0.Execute := FALSE;
MC_ReadAxisError_0.Acknowledge := FALSE;
MC_Reset_0.Execute := FALSE;
(* reset user commands *)
BasicControl.Command.Stop := FALSE;
BasicControl.Command.Halt := FALSE;
BasicControl.Command.Home := FALSE;
BasicControl.Command.MoveJogPos := FALSE;
BasicControl.Command.MoveJogNeg := FALSE;
BasicControl.Command.MoveVelocity := FALSE;
BasicControl.Command.MoveAbsolute := FALSE;
BasicControl.Command.MoveAdditive := FALSE;
BasicControl.Status.ErrorID := 0;
(******************** POWER ON **********************)
STATE_POWER_ON: (* STATE: Power on *)
MC_Power_0.Enable := TRUE;
IF (MC_Power_0.Status = TRUE) THEN
AxisStep := STATE_READY;
END_IF
(* if a power error occured go to error state *)
IF (MC_Power_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_Power_0.ErrorID;
AxisStep := STATE_ERROR;
END_IF
(******************** READY **********************)
STATE_READY: (* STATE: Waiting for commands *)
IF (BasicControl.Command.Home = TRUE)THEN
BasicControl.Command.Home := FALSE;
AxisStep := STATE_HOME;
ELSIF (BasicControl.Command.Stop = TRUE) THEN
AxisStep := STATE_STOP;
ELSIF (BasicControl.Command.MoveJogPos = TRUE) THEN
AxisStep := STATE_JOG_POSITIVE;
ELSIF (BasicControl.Command.MoveJogNeg = TRUE) THEN
AxisStep := STATE_JOG_NEGATIVE;
ELSIF (BasicControl.Command.MoveAbsolute = TRUE) THEN
BasicControl.Command.MoveAbsolute := FALSE;
AxisStep := STATE_MOVE_ABSOLUTE;
ELSIF (BasicControl.Command.MoveAdditive = TRUE) THEN
BasicControl.Command.MoveAdditive := FALSE;
AxisStep := STATE_MOVE_ADDITIVE;
ELSIF (BasicControl.Command.MoveVelocity = TRUE) THEN
BasicControl.Command.MoveVelocity := FALSE;
AxisStep := STATE_MOVE_VELOCITY;
ELSIF (BasicControl.Command.Halt = TRUE) THEN
BasicControl.Command.Halt := FALSE;
AxisStep := STATE_HALT;
END_IF
(******************** HOME **********************)
STATE_HOME: (* STATE: start homing process *)
MC_Home_0.Position := BasicControl.Parameter.HomePosition;
MC_Home_0.HomingMode := BasicControl.Parameter.HomeMode;
MC_Home_0.Execute := TRUE;
IF (MC_Home_0.Done = TRUE) THEN
MC_Home_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* if a homing error occured go to error state *)
IF (MC_Home_0.Error = TRUE) THEN
MC_Home_0.Execute := FALSE;
BasicControl.Status.ErrorID := MC_Home_0.ErrorID;
AxisStep := STATE_ERROR;
END_IF
(***********************HALT_MOVEMENT***************************)
STATE_HALT: (* STATE: Halt movement *)
MC_Halt_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_Halt_0.Execute := TRUE;
IF (MC_Halt_0.Done = TRUE) THEN
MC_Halt_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* check if error occured *)
IF (MC_Halt_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_Halt_0.ErrorID;
MC_Halt_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(*********************** STOP MOVEMENT *************************)
STATE_STOP: (* STATE: Stop movement *)
MC_Stop_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_Stop_0.Execute := TRUE;
(* if axis is stopped go to ready state *)
IF ((MC_Stop_0.Done = TRUE) AND (BasicControl.Command.Stop = FALSE)) THEN
MC_Stop_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* check if error occured *)
IF (MC_Stop_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_Stop_0.ErrorID;
MC_Stop_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** START JOG MOVEMENT POSITVE **********************)
STATE_JOG_POSITIVE: (* STATE: Start jog movement in positive direction *)
MC_MoveVelocity_0.Velocity := BasicControl.Parameter.JogVelocity;
MC_MoveVelocity_0.Acceleration := BasicControl.Parameter.Acceleration;
MC_MoveVelocity_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_MoveVelocity_0.Direction := mcPOSITIVE_DIR;
MC_MoveVelocity_0.Execute := TRUE;
IF (BasicControl.Command.MoveJogPos = FALSE) THEN
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_HALT;
END_IF
(* check if error occured *)
IF (MC_MoveVelocity_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_MoveVelocity_0.ErrorID;
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** START JOG MOVEMENT NEGATIVE **********************)
STATE_JOG_NEGATIVE: (* STATE: Start jog movement in negative direction *)
MC_MoveVelocity_0.Velocity := BasicControl.Parameter.JogVelocity;
MC_MoveVelocity_0.Acceleration := BasicControl.Parameter.Acceleration;
MC_MoveVelocity_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_MoveVelocity_0.Direction := mcNEGATIVE_DIR;
MC_MoveVelocity_0.Execute := TRUE;
IF (BasicControl.Command.MoveJogNeg = FALSE) THEN
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_HALT;
END_IF
(* check if error occured *)
IF (MC_MoveVelocity_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_MoveVelocity_0.ErrorID;
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** START ABSOLUTE MOVEMENT **********************)
STATE_MOVE_ABSOLUTE: (* STATE: Start absolute movement *)
MC_MoveAbsolute_0.Position := BasicControl.Parameter.Position;
MC_MoveAbsolute_0.Velocity := BasicControl.Parameter.Velocity;
MC_MoveAbsolute_0.Acceleration := BasicControl.Parameter.Acceleration;
MC_MoveAbsolute_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_MoveAbsolute_0.Direction := BasicControl.Parameter.Direction;
MC_MoveAbsolute_0.Execute := TRUE;
(* check if commanded position is reached *)
IF (BasicControl.Command.Halt) THEN
BasicControl.Command.Halt := FALSE;
MC_MoveAbsolute_0.Execute := FALSE;
AxisStep := STATE_HALT;
ELSIF (MC_MoveAbsolute_0.Done = TRUE) THEN
MC_MoveAbsolute_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* check if error occured *)
IF (MC_MoveAbsolute_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_MoveAbsolute_0.ErrorID;
MC_MoveAbsolute_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** START ADDITIVE MOVEMENT **********************)
STATE_MOVE_ADDITIVE: (* STATE: Start additive movement *)
MC_MoveAdditive_0.Distance := BasicControl.Parameter.Distance;
MC_MoveAdditive_0.Velocity := BasicControl.Parameter.Velocity;
MC_MoveAdditive_0.Acceleration := BasicControl.Parameter.Acceleration;
MC_MoveAdditive_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_MoveAdditive_0.Execute := TRUE;
(* check if commanded distance is reached *)
IF (BasicControl.Command.Halt) THEN
BasicControl.Command.Halt := FALSE;
MC_MoveAdditive_0.Execute := FALSE;
AxisStep := STATE_HALT;
ELSIF (MC_MoveAdditive_0.Done = TRUE) THEN
MC_MoveAdditive_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* check if error occured *)
IF (MC_MoveAdditive_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_MoveAdditive_0.ErrorID;
MC_MoveAdditive_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** START VELOCITY MOVEMENT **********************)
STATE_MOVE_VELOCITY: (* STATE: Start velocity movement *)
MC_MoveVelocity_0.Velocity := BasicControl.Parameter.Velocity;
MC_MoveVelocity_0.Acceleration := BasicControl.Parameter.Acceleration;
MC_MoveVelocity_0.Deceleration := BasicControl.Parameter.Deceleration;
MC_MoveVelocity_0.Direction := BasicControl.Parameter.Direction;
MC_MoveVelocity_0.Execute := TRUE;
(* check if commanded velocity is reached *)
IF (BasicControl.Command.Halt) THEN
BasicControl.Command.Halt := FALSE;
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_HALT;
ELSIF (MC_MoveVelocity_0.InVelocity = TRUE) THEN
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_READY;
END_IF
(* check if error occured *)
IF (MC_MoveVelocity_0.Error = TRUE) THEN
BasicControl.Status.ErrorID := MC_MoveVelocity_0.ErrorID;
MC_MoveVelocity_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** FB-ERROR OCCURED *************************)
STATE_ERROR: (* STATE: Error *)
(* check if FB indicates an axis error *)
IF (MC_ReadAxisError_0.AxisErrorCount<>0) THEN
AxisStep := STATE_ERROR_AXIS;
ELSE
IF (BasicControl.Command.ErrorAcknowledge = TRUE) THEN
BasicControl.Command.ErrorAcknowledge := FALSE;
BasicControl.Status.ErrorID := 0;
(* reset axis if it is in axis state ErrorStop *)
IF ((MC_ReadStatus_0.Errorstop = TRUE) AND (MC_ReadStatus_0.Valid = TRUE)) THEN
AxisStep := STATE_ERROR_RESET;
ELSE
AxisStep := STATE_WAIT;
END_IF
END_IF
END_IF
(******************** AXIS-ERROR OCCURED *************************)
STATE_ERROR_AXIS: (* STATE: Axis Error *)
IF (MC_ReadAxisError_0.Valid = TRUE) THEN
IF (MC_ReadAxisError_0.AxisErrorID <> 0) THEN
BasicControl.Status.ErrorID := MC_ReadAxisError_0.AxisErrorID;
END_IF
MC_ReadAxisError_0.Acknowledge := FALSE;
IF (BasicControl.Command.ErrorAcknowledge = TRUE) THEN
BasicControl.Command.ErrorAcknowledge := FALSE;
(* acknowledge axis error *)
IF (MC_ReadAxisError_0.AxisErrorID <> 0) THEN
MC_ReadAxisError_0.Acknowledge := TRUE;
END_IF
END_IF
IF (MC_ReadAxisError_0.AxisErrorCount = 0) THEN
(* reset axis if it is in axis state ErrorStop *)
BasicControl.Status.ErrorID := 0;
IF ((MC_ReadStatus_0.Errorstop = TRUE) AND (MC_ReadStatus_0.Valid = TRUE)) THEN
AxisStep := STATE_ERROR_RESET;
ELSE
AxisStep := STATE_WAIT;
END_IF
END_IF
END_IF
(******************** RESET DONE *************************)
STATE_ERROR_RESET: (* STATE: Wait for reset done *)
MC_Reset_0.Execute := TRUE;
(* reset MC_Power.Enable if this FB is in Error*)
IF (MC_Power_0.Error = TRUE) THEN
MC_Power_0.Enable := FALSE;
END_IF
IF(MC_Reset_0.Done = TRUE)THEN
MC_Reset_0.Execute := FALSE;
AxisStep := STATE_WAIT;
ELSIF(MC_Reset_0.Error = TRUE) THEN
MC_Reset_0.Execute := FALSE;
AxisStep := STATE_ERROR;
END_IF
(******************** SEQUENCE END *************************)
END_CASE
(***************************************************************
Function Block Calls
***************************************************************)
(************************** MC_POWER ****************************)
MC_Power_0.Axis := Axis1Obj; (* pointer to axis *)
MC_Power_0();
(************************** MC_HOME *****************************)
MC_Home_0.Axis := Axis1Obj;
MC_Home_0();
(********************** MC_MOVEABSOLUTE *************************)
MC_MoveAbsolute_0.Axis := Axis1Obj;
MC_MoveAbsolute_0();
(********************** MC_MOVEADDITIVE *************************)
MC_MoveAdditive_0.Axis := Axis1Obj;
MC_MoveAdditive_0();
(********************** MC_MOVEVELOCITY *************************)
MC_MoveVelocity_0.Axis := Axis1Obj;
MC_MoveVelocity_0();
(************************** MC_STOP *****************************)
MC_Stop_0.Axis := Axis1Obj;
MC_Stop_0();
(***************************MC_HALT******************************)
MC_Halt_0.Axis := Axis1Obj;
MC_Halt_0();
(************************** MC_RESET ****************************)
MC_Reset_0.Axis := Axis1Obj;
MC_Reset_0();
END_PROGRAM
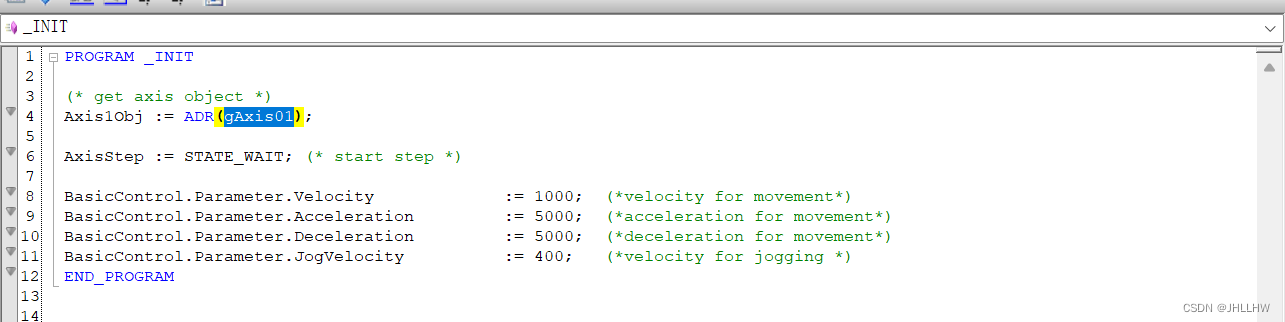
初始化程序
PROGRAM _INIT
(* get axis object *)
Axis1Obj := ADR(gAxis01);
AxisStep := STATE_WAIT; (* start step *)
BasicControl.Parameter.Velocity := 1000; (*velocity for movement*)
BasicControl.Parameter.Acceleration := 5000; (*acceleration for movement*)
BasicControl.Parameter.Deceleration := 5000; (*deceleration for movement*)
BasicControl.Parameter.JogVelocity := 400; (*velocity for jogging *)
END_PROGRAM
2.2.6 例程控制程序仿真
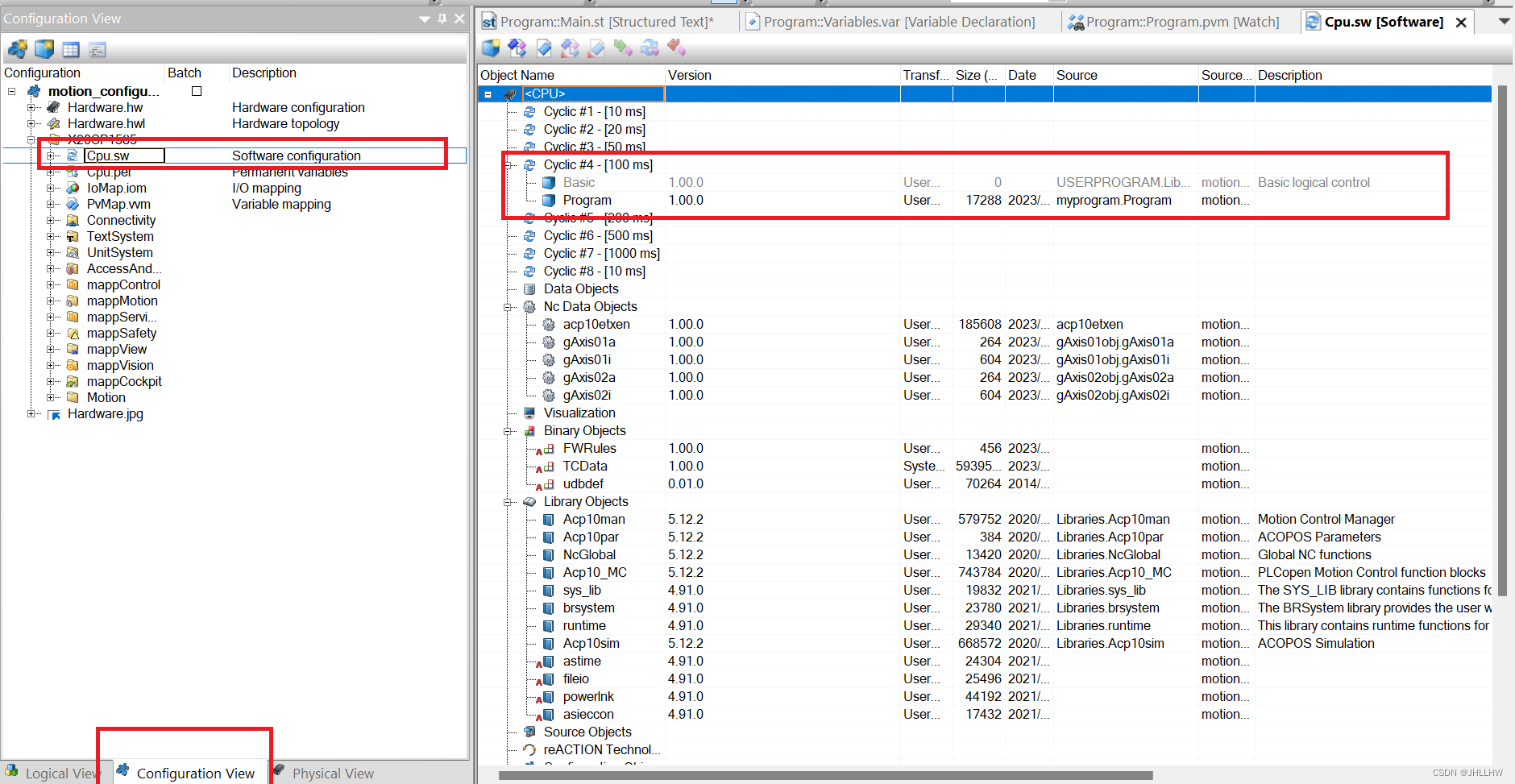
2.2.7查看自己轴名,匹配到程序中

将程序中的轴名改成自己的轴名
2.2.8下载或者烧卡,这里选择烧卡

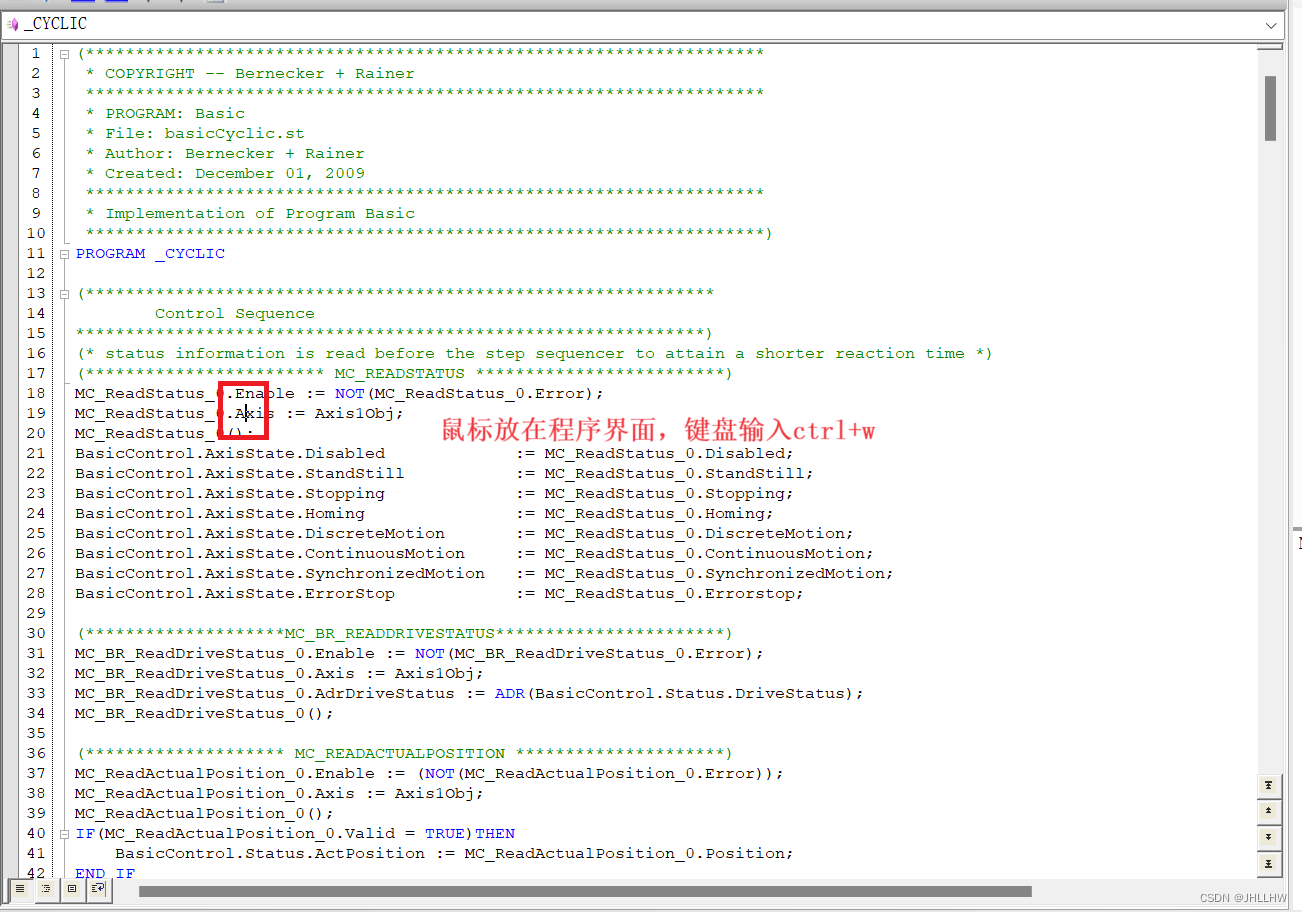
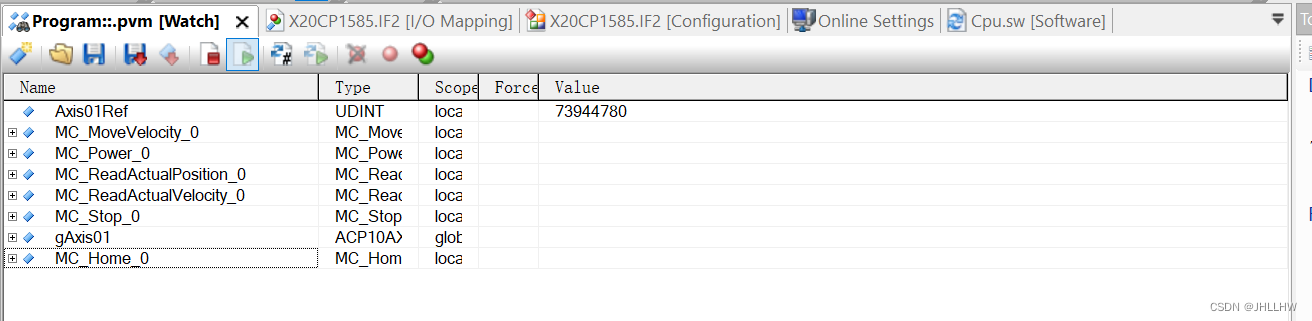
2.2.9打开仿真界面,鼠标放在程序窗口,ctrl+w,即可打开仿真界面
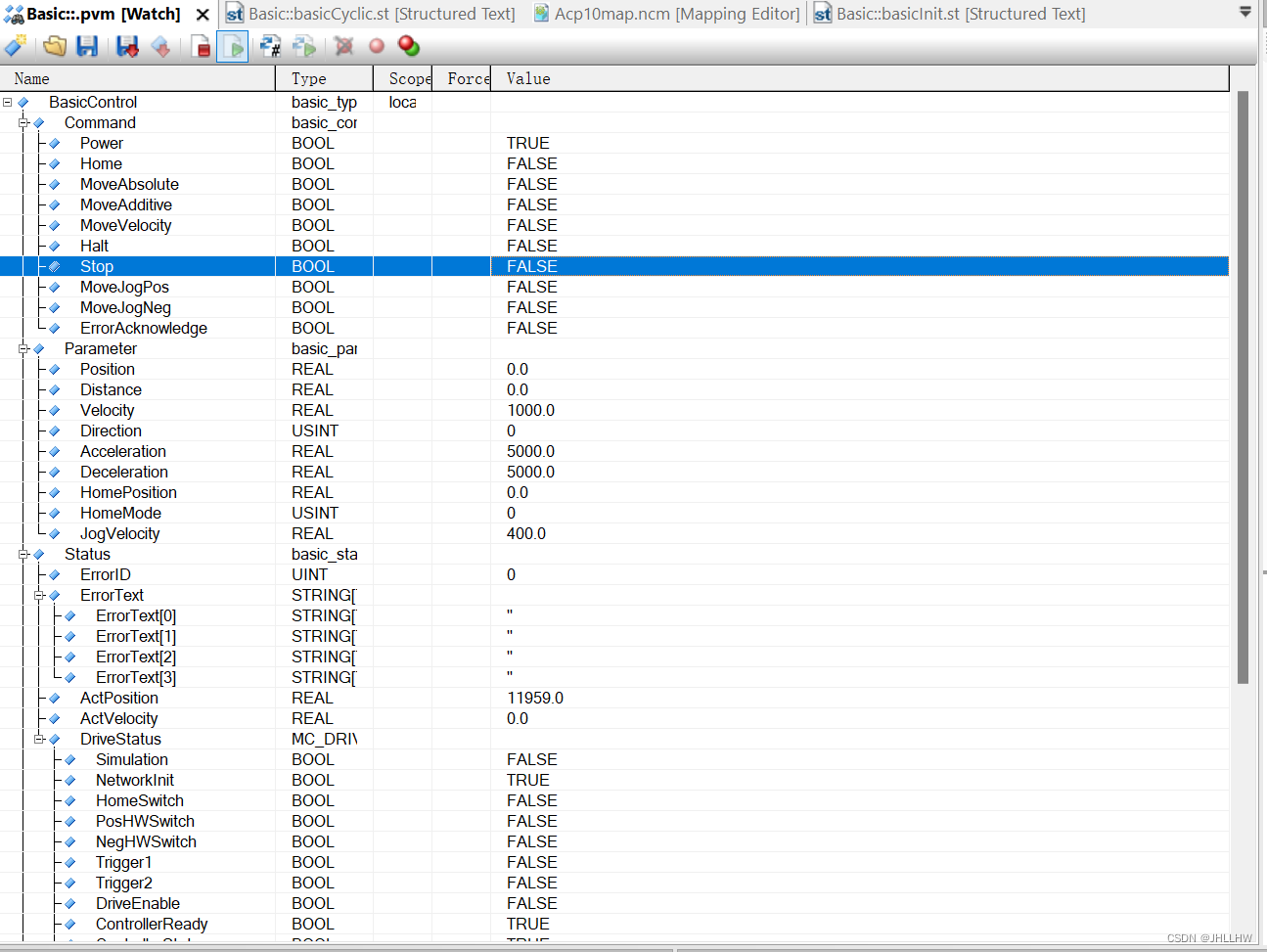
2.2.10 在仿真页面(watch)添加要观察的变量
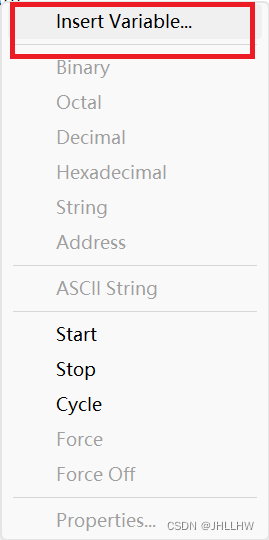
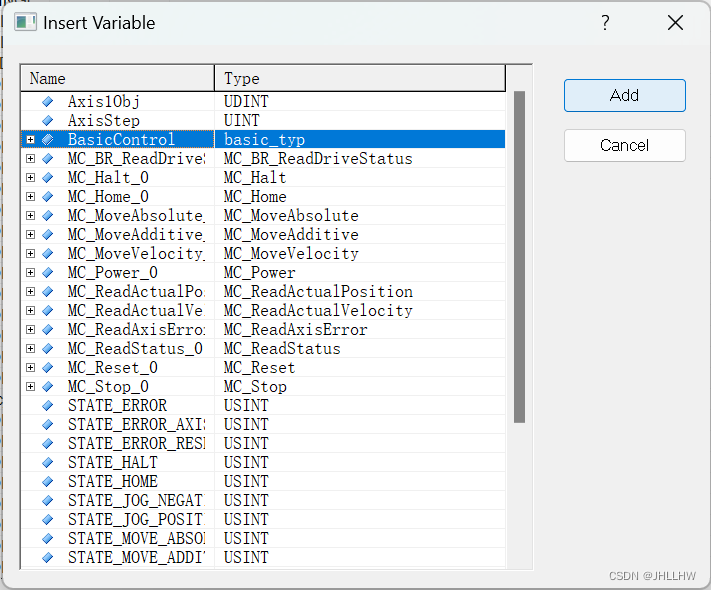
2.2.11 在仿真页面(watch)运行仿真
2.3 自建控制程序
2.3.1 新建自己工程的文件夹,仿照2.2.1和2.2.2
2.3.2 添加自己的控制程序文件
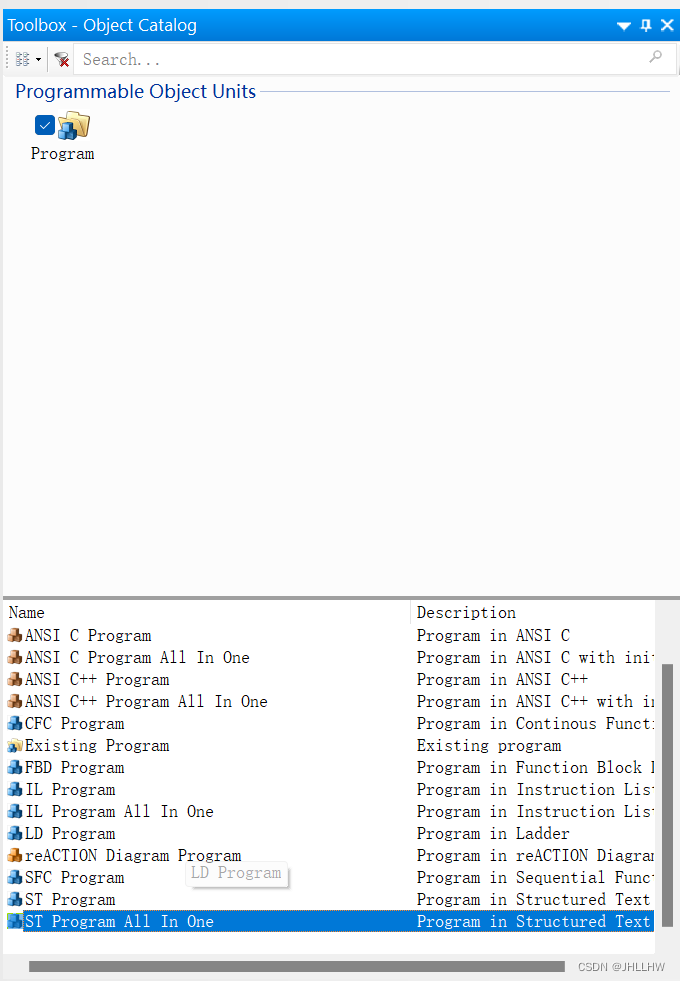
2.3.3 编写自己的控制程序
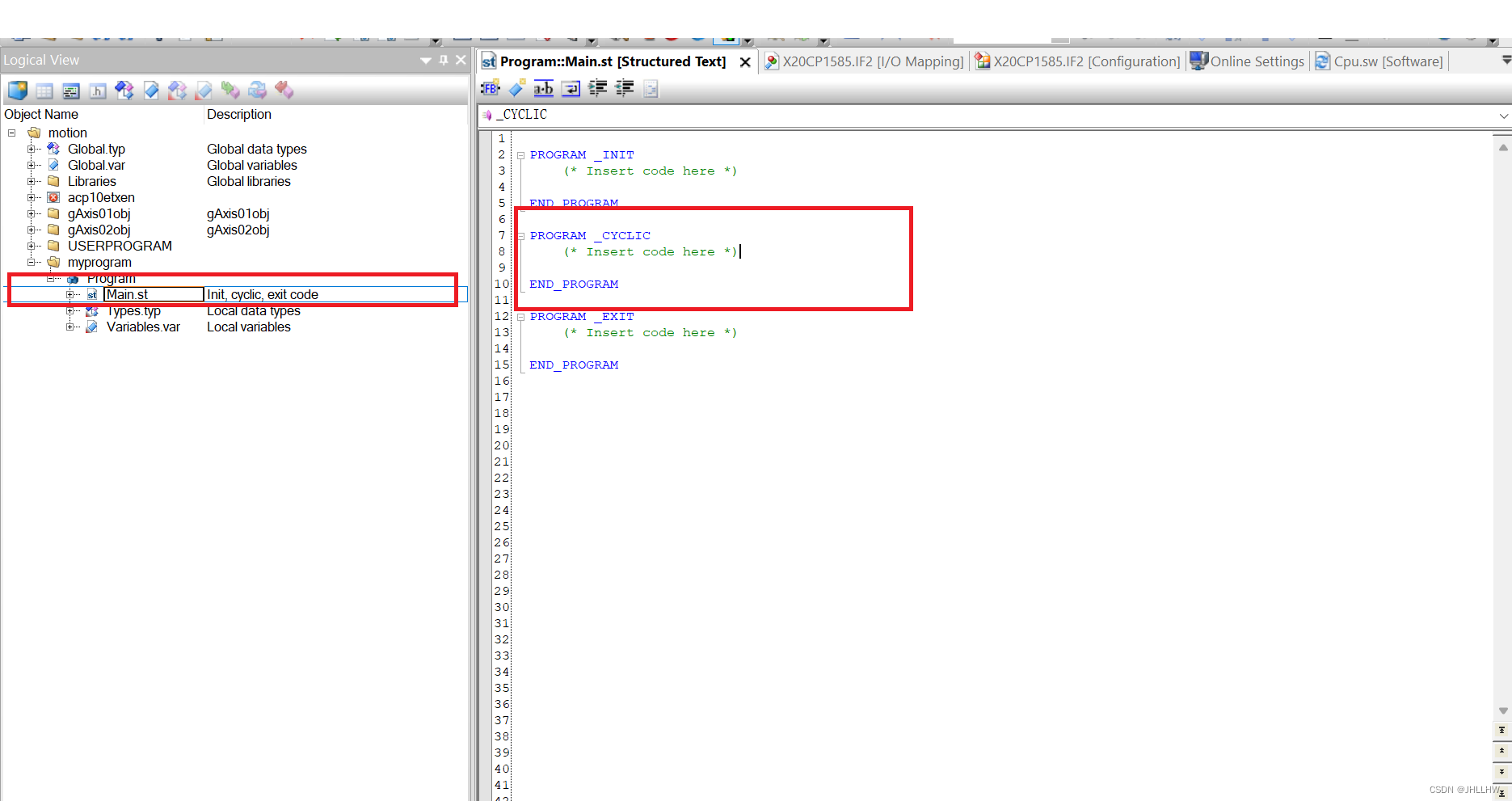
2.3.4代码如下
PROGRAM _INIT
(* Insert code here *)
Axis01Ref := ADR(gAxis01);
END_PROGRAM
PROGRAM _CYCLIC
(* Insert code here *)
//使能
MC_Power_0.Axis:=Axis01Ref;
MC_Power_0.Enable:=MC_Power_0.Enable;
MC_Power_0();
//回零
MC_Home_0.Axis:=Axis01Ref;
MC_Home_0.Execute:=MC_Home_0.Execute ;
MC_Home_0.Position:=0;
MC_Home_0.HomingMode:=mcHOME_DIRECT ;
MC_Home_0();
//读取实际位置
MC_ReadActualPosition_0.Axis:=Axis01Ref ;
MC_ReadActualPosition_0.Enable:=1 ;
MC_ReadActualPosition_0();
//读取实际速度
MC_ReadActualVelocity_0.Axis:= Axis01Ref;
MC_ReadActualVelocity_0.Enable:=1 ;
MC_ReadActualVelocity_0();
//停止
MC_Stop_0.Axis:= Axis01Ref;
MC_Stop_0.Execute:=MC_Stop_0.Execute ;
MC_Stop_0.Deceleration:=100 ;
MC_Stop_0();
//连续运动
MC_MoveVelocity_0.Axis:=Axis01Ref ;
MC_MoveVelocity_0.Execute:=MC_MoveVelocity_0.Execute ;
MC_MoveVelocity_0.Velocity:=MC_MoveVelocity_0.Velocity ;
MC_MoveVelocity_0.Acceleration:=1000 ;
MC_MoveVelocity_0.Deceleration:=1000 ;
MC_MoveVelocity_0.Direction:=mcPOSITIVE_DIR;
MC_MoveVelocity_0( );
END_PROGRAM
PROGRAM _EXIT
(* Insert code here *)
END_PROGRAM
2.3.5 开始仿真,仿照2.2.7-2.2.8-2.2.9-2.2.10,打开watch
注意:仿真时cpu运行程序不能由冲突
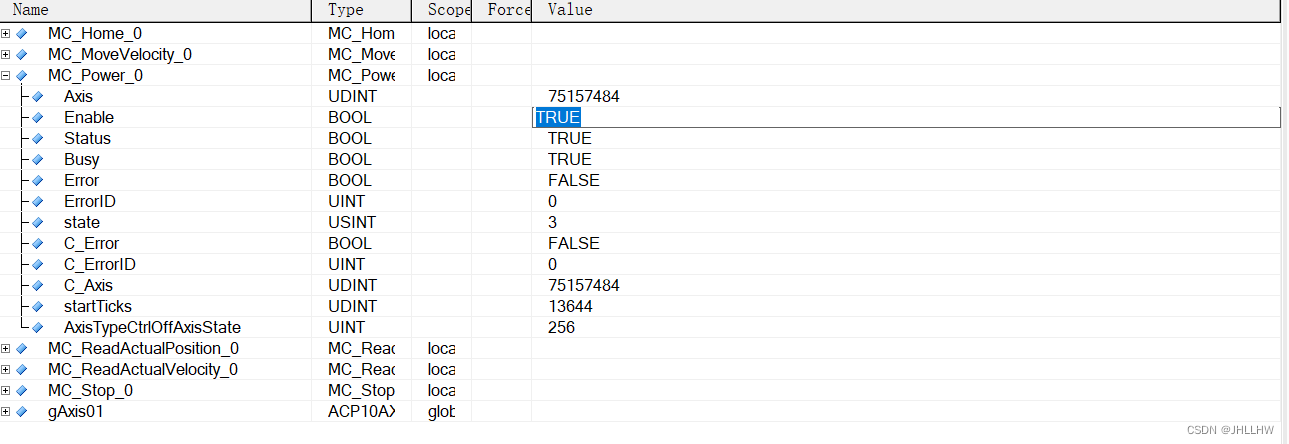
2.3.7 设置变量,验证代码
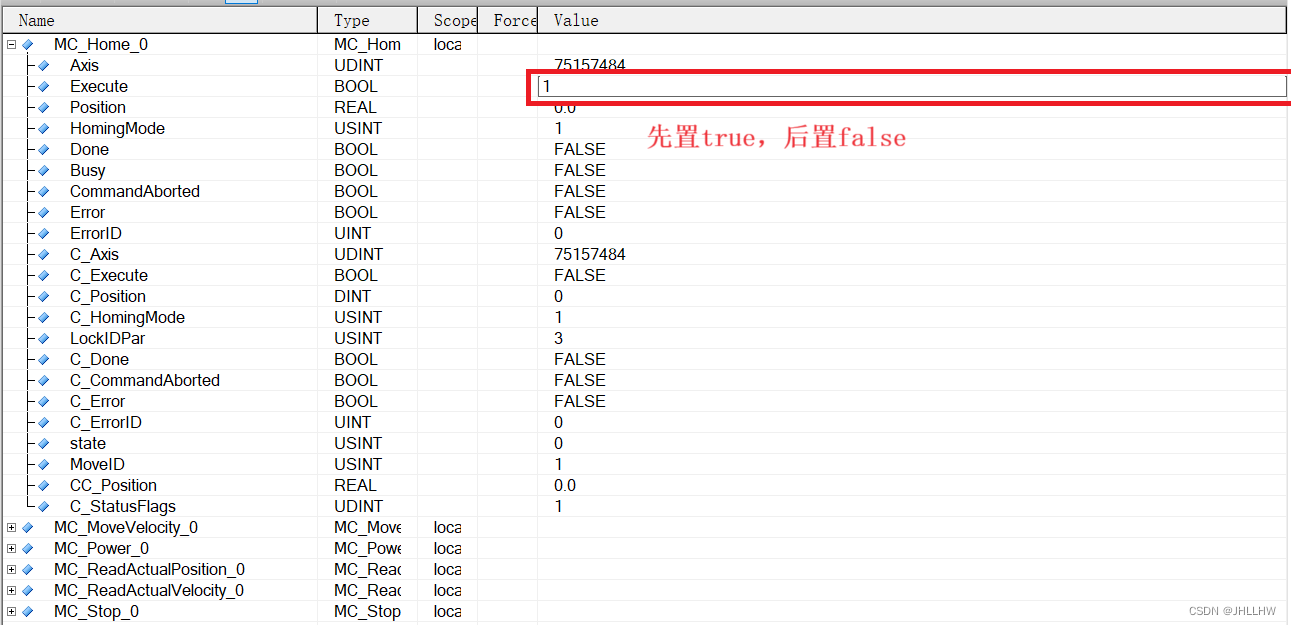
1. 打开使能
2. 回零
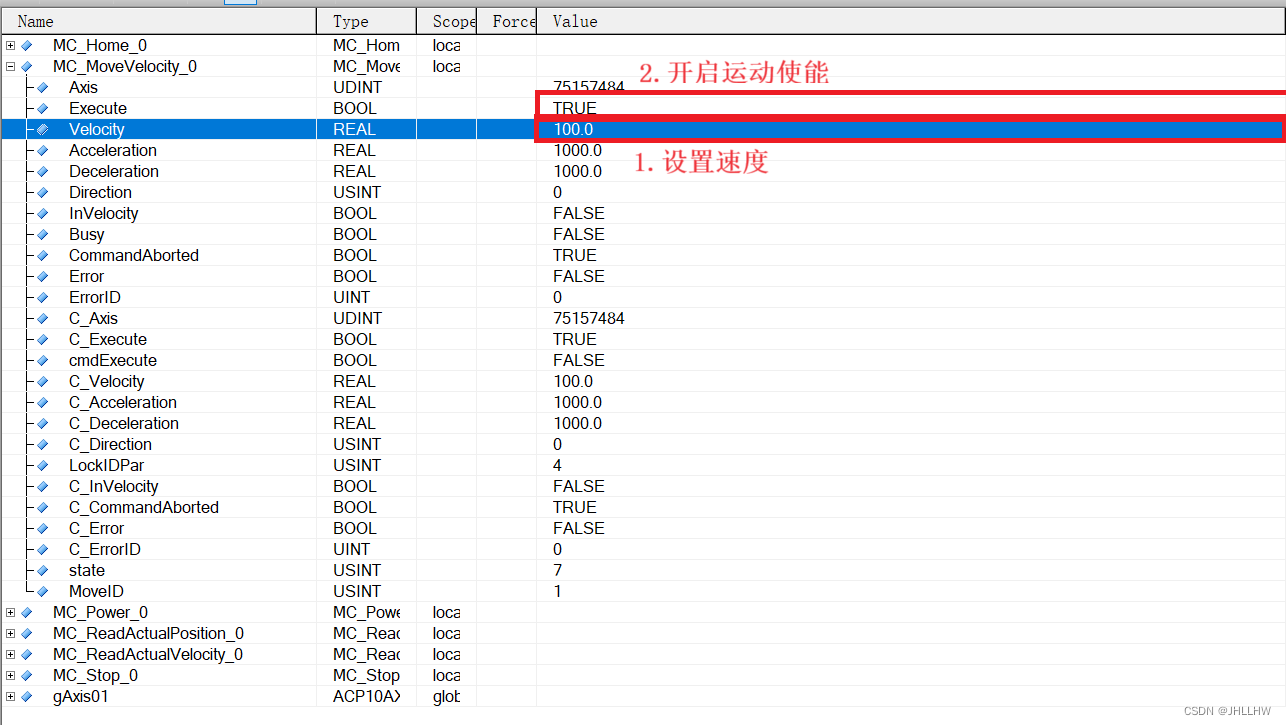
3.设置速度开启运动
4.查看实时速度和位置
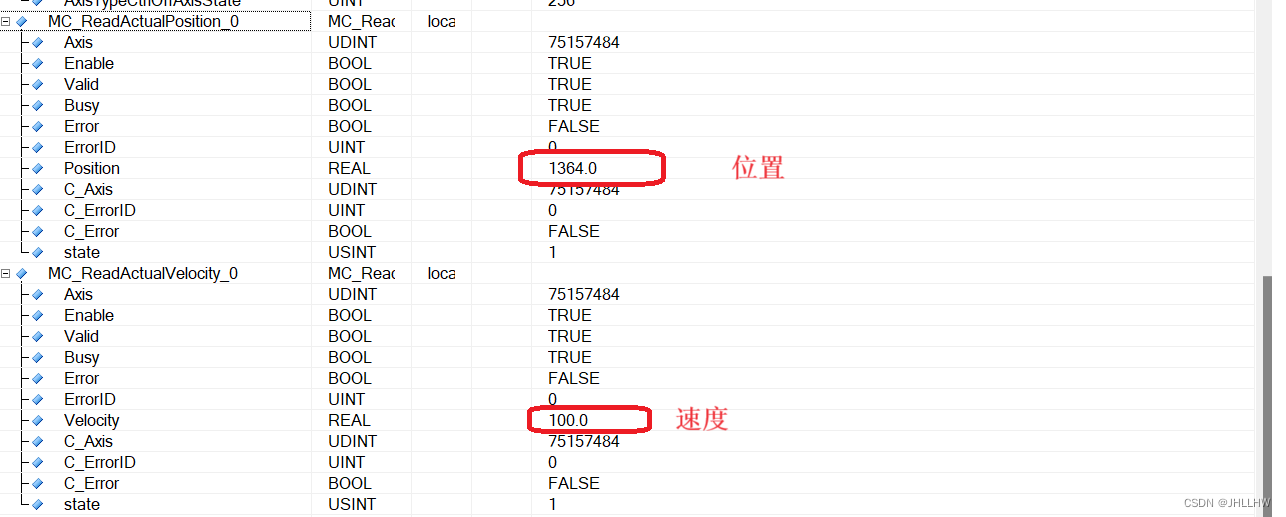
完成验证。

















 7732
7732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









