







本篇文章主要是介绍毫米波雷达的基础知识中的系统设计,主要包含三个知识点
2D-FFT的过程
在设计帧的时候,根据一些参数进行的折中
雷达距离的等式
2D-FFT
range-FFT
雷达处理接收天线接收回来的数据,对每一个接收回来的chirp做range-fft,然后range-fft处理后的数据按行存储到L3或DDR中,由于range-fft对应的频率,距离与中频成正比,因此可以将x轴绘制为距离轴,如下图:
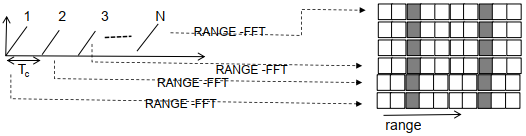
在上面的图中,在距离维度上的range=3和range=8的距离处有物体,但是有几个物体不知道,只是知道雷达前方有物体,
注意:
- 在大多数雷达的实现中,range-fft是在将ADC样本存储到内存之前完成的
doppler-FFT
在执行完range-fft之后,要在chirp index方向上做doppler-fft,做doppler-fft的时候,要将数据从L3或DDR内存中取出,然后再执行doppler-fft,由于dopper-fft对应离散角频率,离散角频率与速度成正比,因此可以将y轴绘制为速度轴。
如下图:
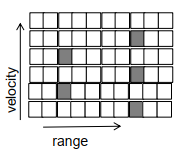
对做了range-fft的数据做doppler-fft,会发现在距离为range=3处有两个物体,速度分别为1和4,在range=8处有三个物体,速度分别为1、3和5。
注意:
- 只有一个frame中的全部chirp做了range-fft之后才可以执行doppler-fft,因此系统中必须有足够的存储器来存储执行range-fft之后的数据
设计chirp的参数要求
最大速度:
v
m
a
x
=
λ
4
T
c
⇒
T
c
=
λ
4
v
m
a
x
v_{max}=\frac{\lambda}{4T_c} \Rightarrow T_c=\frac{\lambda}{4v_{max}}
vmax=4Tcλ⇒Tc=4vmaxλ
T
c
Tc
Tc的取值受限于雷达可测的最大速度
速度分辨率:
v
r
e
s
=
λ
2
T
f
⇒
T
f
=
λ
2
v
r
e
s
v_{res}=\frac{\lambda}{2T_f}\Rightarrow T_f=\frac{\lambda}{2v_{res}}
vres=2Tfλ⇒Tf=2vresλ
T
f
T_f
Tf的取值受限于雷达可测的速度分辨率
距离分辨率:
d
r
e
s
=
c
2
B
⇒
B
=
c
2
d
r
e
s
d_{res}=\frac{c}{2B}\Rightarrow B=\frac{c}{2d_{res}}
dres=2Bc⇒B=2dresc
B
B
B的取值受限于雷达可测的距离分辨率
由于chirp的带宽和持续时间确定,那么意味着chirp的斜率S也就确定
在实际的确定参数的过程中,可能会受到雷达设备自身的限制
- 设备可能不支持最大的中频带宽,由于 f I F m a x = S 2 d m a x c f_{IF_max}=\frac{S2d_{max}}{c} fIFmax=cS2dmax,因此 S S S和 d m a x d_{max} dmax之间要有一个折中, d m a x d_{max} dmax增大, S S S减小
- 设备要能够生成所需要的chirp的斜率
- 在两个相邻的chirp之间,指定的idle time,也需要满足设备
- 设备必须有足够的内存来存储frame中全部的chirps
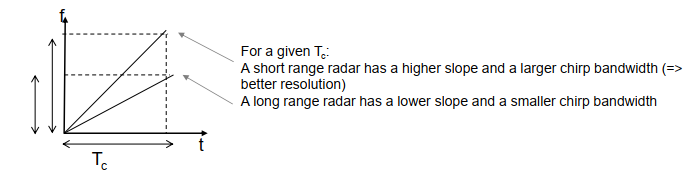
假设 T c T_c Tc已经由 v m a x v_{max} vmax决定,短距离的雷达的chirp的斜率更高,因此有一个更大的带宽(B),有更好的距离分辨率,长距离的雷达的chirp的斜率更低,因此有一个较小的带宽(B),距离分辨率就会变差。
雷达的距离方程
ADC的采样率会限制雷达探测的最远距离,还有一个因素是最大的距离物体的发射信号应具有足够的强度,才能够被雷达检测到
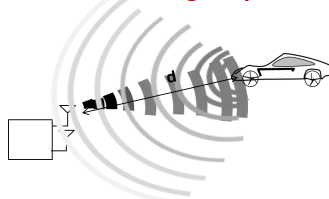
雷达辐射的密度公式为:
P
t
G
T
X
4
π
d
2
W
/
m
2
\frac{P_tG_{TX}}{4\pi d^2}W/m^2
4πd2PtGTXW/m2,
P
t
P_t
Pt为雷达的发射功率,在空间中,功率密度随距离的平方增加而不断减小,
G
T
X
G_{TX}
GTX为发射天线的增益。
当信号碰到物体,反射的功率为:
P
t
G
T
X
σ
4
π
d
2
W
\frac{P_tG_{TX}\sigma}{4\pi d^2}W
4πd2PtGTXσW,
σ
\sigma
σ是物体的发射截面积(Radar Cross Section of the Target,RCS)
在接收天线处的接收功率密度为:
P
t
G
T
X
σ
(
4
π
)
2
d
4
W
/
m
2
\frac{P_tG_{TX}\sigma}{(4\pi)^2 d^4}W/m^2
(4π)2d4PtGTXσW/m2,在信号返回的空间中,功率密度随距离的平方增加而不断减小
在接收天线处的捕获的功率为:
P
t
G
T
X
σ
A
R
X
(
4
π
)
2
d
4
W
\frac{P_tG_{TX}\sigma A_{RX}}{(4\pi)^2 d^4}W
(4π)2d4PtGTXσARXW,
A
R
X
=
G
R
X
λ
2
4
π
A_{RX}=\frac{G_{RX}\lambda^2}{4\pi}
ARX=4πGRXλ2,进行替换,得到
P
t
G
T
X
σ
G
R
X
λ
2
(
4
π
)
3
d
4
W
\frac{P_tG_{TX}\sigma G_{RX}\lambda^2}{(4\pi)^3 d^4}W
(4π)3d4PtGTXσGRXλ2W,
A
R
X
A_{RX}
ARX是接收天线的有效的孔径的面积
接收器是否能够看到目标不仅取决于接收到信号的功率,还取决于信号能量于噪声能量的比率,也就是信噪比(SNR)
公式:
S
N
R
=
σ
P
t
G
T
X
G
R
X
λ
2
T
m
e
a
s
(
4
π
)
3
d
4
k
T
F
SNR=\frac{\sigma P_tG_{TX}G_{RX}\lambda^2T_{meas}}{(4\pi)^3d^4kTF}
SNR=(4π)3d4kTFσPtGTXGRXλ2Tmeas
T
m
e
a
s
T_{meas}
Tmeas是总共的测量时间,
T
m
e
a
s
=
N
T
c
T_{meas}=NT_c
Tmeas=NTc,N表示有多少个chirp,
T
c
T_c
Tc是说明每个chirp持续的时间
kT是接收器的热噪声,k是玻尔兹曼常数,T是天线的温度
检测物体所需要的最小信噪比 S N R m i n SNR_{min} SNRmin,在距离速度图中检测到的信噪比只要小于 S N R m i n SNR_{min} SNRmin就不会被视为有效的目标,是漏检(missed detection)和虚警(false alarm)的折衷。典型的值的范围是15dB~20dB。
当指定了
S
N
R
m
i
n
SNR_{min}
SNRmin,最大距离
d
m
a
x
d_{max}
dmax就可以确定:
d
m
a
x
=
(
σ
P
t
G
T
X
G
R
X
λ
2
T
m
e
a
s
(
4
π
)
3
S
N
R
m
i
n
k
T
F
)
1
4
d_{max}=(\frac{\sigma P_tG_{TX}G_{RX}\lambda^2 T_{meas}}{(4\pi)^3SNR_{min}kTF})^{\frac{1}{4}}
dmax=((4π)3SNRminkTFσPtGTXGRXλ2Tmeas)41
参考文献:
- 《mmwaveSensing-FMCW-offlineviewing》


















 263
263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











