






1.下载 bag2mat工具。https://github.com/neufieldrobotics/bag2mat
这个一会我单独传上去
2.解压后放在工作空间下,使用catkin_make进行编译。
mkdir -p your_project_path/src
cd your_project_path/src
catkin_init_workspace
cd ../到 your_project_path
catkin_make
编译的时候缺什么下什么
3. source devel/setup.bash
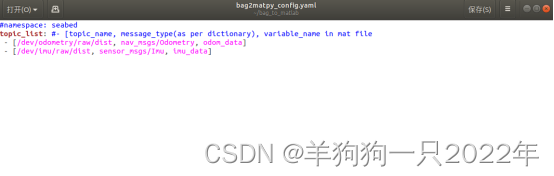
4.修改 bag2mat内的config文件
我们这里要odom和imu
5.将rosbag录制的包和第四步修改的配置文件放入同一文件夹。
6.在source环境变量的终端下输入
rosrun bag2mat bag2matpy -i (录制的包名) -c (修改的配置参数)
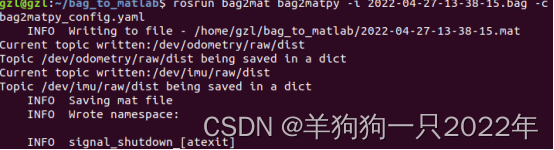
等待.mat文件生成,即可在matlab中使用。















 1508
1508











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









