






ROS多机通信与话题控制
第一次写博客,写得不好大家见谅
任务描述
背景:师兄在仿真中完成了多机建图,想要在真机上验证一下。具体需求:对于单个机器人,师兄想要得到某个时刻这个机器人的一些状态信息,并且要保存成npy格式;并且实现多机协同(多个机器人的数据获取和控制)。下面是具体的解决方案。
键盘控制获取数据
需要安装 pynput 这个库,如果是python3,直接install即可;如果是python2,需要寻找该库的就版本以支持python2。
#!/usr/bin/env python
# -*-coding:utf-8-*
import rospy
from pynput import keyboard
count = 0
def on_press(key):
global count
if key == keyboard.Key.space:
count += 1
print(count)
def main():
rospy.init_node('keyboard_counter', anonymous=True)
rospy.loginfo("按空格键来增加计数。")
# 收听键盘事件
listener = keyboard.Listener(on_press=on_press)
listener.start()
# 保持节点运行直到被关闭
rospy.spin()
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
pass
利用键盘保存当前时刻机器人的数据
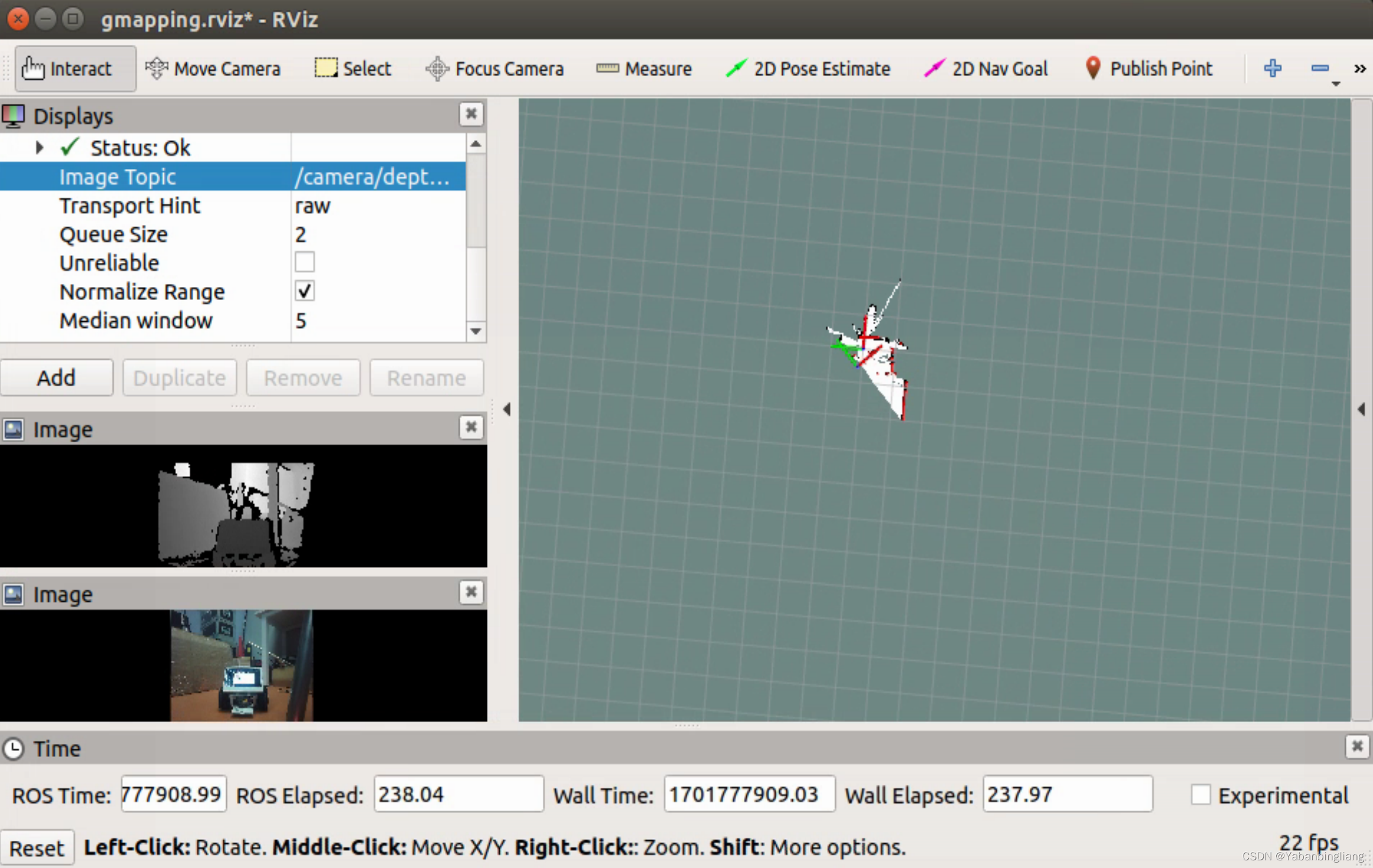
单个机器人启动底盘、相机和 gmapping后效果如图
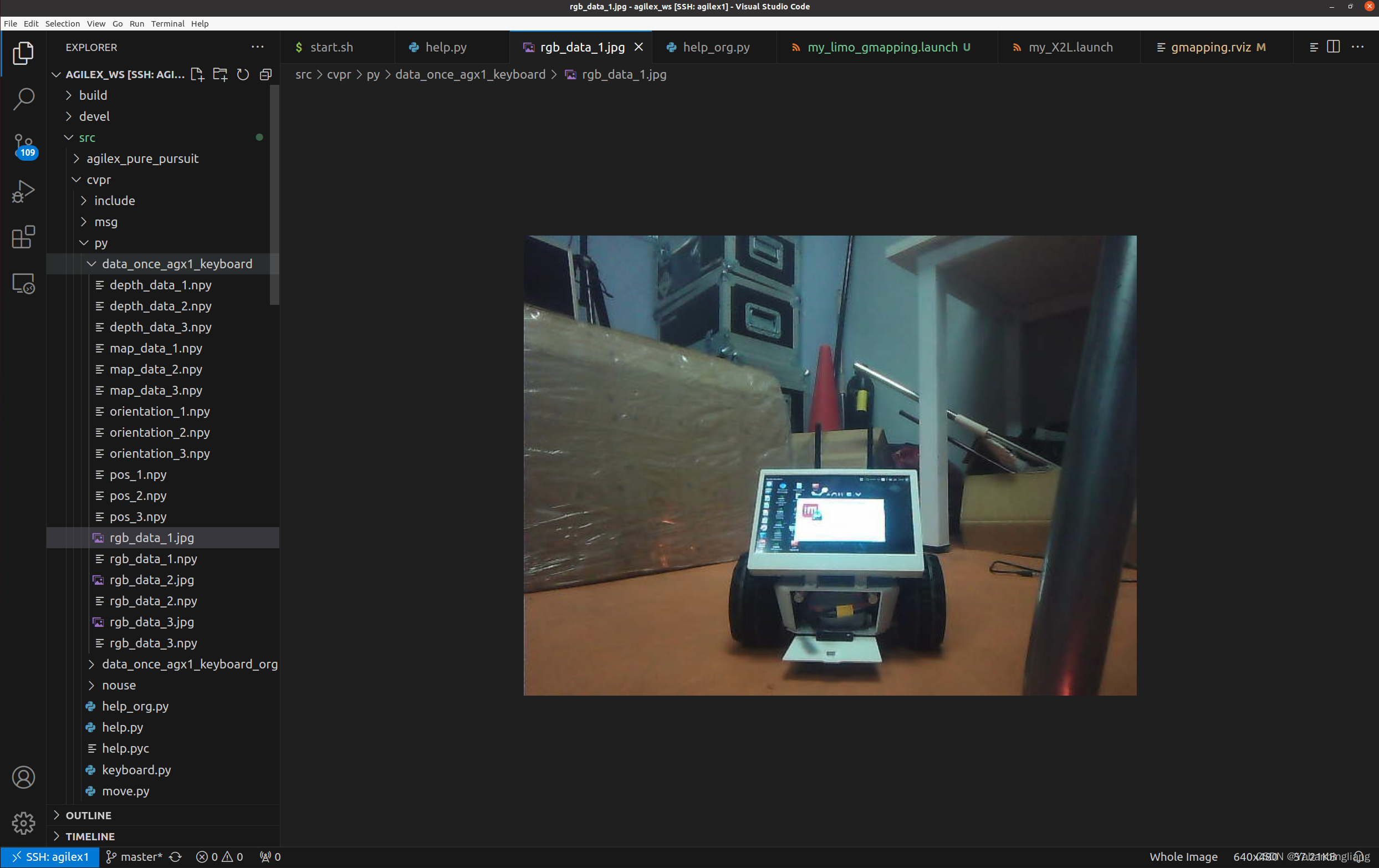
help.py如下 主要功能是获取小车的odom、rgb、depth 和 map,并且能够通过敲击键盘保存当前小车的这四个信息。
import os
import rospy
import numpy as np
from sensor_msgs.msg import Image
from nav_msgs.msg import Odometry
from nav_msgs.msg import OccupancyGrid
from cv_bridge import CvBridge, CvBridgeError
import cv2
import time
import json
import pickle
from pynput import keyboard
import threading
from cvpr.msg import save
class getMsg(object):
def __init__(self, check_topic=True, saveimg=False):
self.keyNum = 0
self.counts = 0
self.saveNum = 0
self.rgb_callback_count = 0
self.depth_callback_count = 0
self.rgb = None
self.depth = None
self.odom = None
self.map = None
self.saveimg = saveimg
self.rgb_init = False
self.depth_init = False
self.odom_init = False
self.map_init = False
self.map_sub = rospy.Subscriber("/map", OccupancyGrid, self.map_callback)
self.odom_sub = rospy.Subscriber("/odom", Odometry, self.odom_callback)
self.rgb_sub = rospy.Subscriber("/camera/rgb/image_raw", Image, self.rgb_callback)
self.depth_sub = rospy.Subscriber("/camera/depth/image_raw", Image, self.depth_callback)
self.save_sub = rospy.Subscriber("/save", save, self.save_callback)
self.data = None
self.rgb_callback_np = [] # N * 480 * 640 * 3
self.depth_callback_np = [] # N * 480 * 640 * 3
self.pos_np = [] # x y z
self.orientation_np = [] # x y z w
self.map_data_np = [] # 1984 * 1984 array
self.map_meta_data_np = [] # x y z + x y z w
self.data_num = 0
if check_topic:
while not self.rgb_init:
continue
while not self.depth_init:
continue
while not self.odom_init:
continue
while not self.map_init:
continue
rospy.loginfo("getMsg Finish Subscriber Init...")
else:
rospy.loginfo("Jump Subscriber Init...")
def rgb_callback(self, msg):
self.rgb_init = True
self.rgb = msg
def depth_callback(self, msg):
self.depth_init = True
self.depth = msg
def odom_callback(self, msg):
self.odom_init = True
self.odom = msg
self.counts = 1
def map_callback(self, msg):
self.map_init = True
self.map = msg
def save_callback(self, msg):
self.save = msg
print("save = %d", msg)
def msg2npy(self, once=False):
rgb_msg = self.rgb
bridge = CvBridge()
cv_image = bridge.imgmsg_to_cv2(rgb_msg, "bgr8")
rgb = np.array(cv_image)
depth_msg = self.depth
bridge = CvBridge()
cv_image = bridge.imgmsg_to_cv2(depth_msg, desired_encoding="32FC1")
depth = np.array(cv_image)
pos = self.odom.pose.pose.position
orientation = self.odom.pose.pose.orientation
self.pos_np.append([pos.x, pos.y, pos.z])
self.orientation_np.append([orientation.x, orientation.y, orientation.z, orientation.w])
map = self.map
map_meta_data = map.info
map_data = np.array(map.data).reshape(map_meta_data.width, map_meta_data.height)
self.map_data_np.append(map_data)
self.map_meta_data_np = [map_meta_data.origin.position.x, map_meta_data.origin.position.y, map_meta_data.origin.position.z,
map_meta_data.origin.orientation.x, map_meta_data.origin.orientation.y, map_meta_data.origin.orientation.z, map_meta_data.origin.orientation.w
]
self.data_num += 1
if once:
dir_name = "data_once_agx1"
# print(dir_name)
if not os.path.exists(dir_name):
os.makedirs(dir_name)
np.save(dir_name + "/rgb_data_{}.npy".format(self.data_num), rgb)
np.save(dir_name + "/depth_data_{}.npy".format(self.data_num), depth)
# np.save(dir_name + "/" + "pos_" + self.data_num + ".npy", pos)
np.save(dir_name + "/pos_{}.npy".format(self.data_num), [pos.x, pos.y, pos.z])
np.save(dir_name + "/orientation_{}.npy".format(self.data_num), [orientation.x, orientation.y, orientation.z, orientation.w])
np.save(dir_name + "/map_data_{}.npy".format(self.data_num), map_data)
def onPress(self, key):
if key == keyboard.Key.space:
rgb_msg = self.rgb
bridge = CvBridge()
cv_image = bridge.imgmsg_to_cv2(rgb_msg, "bgr8")
rgb = np.array(cv_image)
depth_msg = self.depth
bridge = CvBridge()
cv_image = bridge.imgmsg_to_cv2(depth_msg, desired_encoding="32FC1")
depth = np.array(cv_image)
pos = self.odom.pose.pose.position
orientation = self.odom.pose.pose.orientation
# print(orientation)
map = self.map
map_meta_data = map.info
map_data = np.array(map.data).reshape(map_meta_data.width, map_meta_data.height)
self.keyNum += 1
# rospy.loginfo(f"cur num: {self.keyNum}")
print("cur num %d" % self.keyNum)
dir_name = "data_once_agx1_keyboard"
if not os.path.exists(dir_name):
os.makedirs(dir_name)
np.save(dir_name + "/rgb_data_{}.npy".format(self.keyNum), rgb)
np.save(dir_name + "/depth_data_{}.npy".format(self.keyNum), depth)
np.save(dir_name + "/pos_{}.npy".format(self.keyNum), [pos.x, pos.y, pos.z])
# np.save(dir_name + "/pos_{}.npy".format(self.keyNum), [0, 0, self.keyNum])
np.save(dir_name + "/orientation_{}.npy".format(self.keyNum), [orientation.x, orientation.y, orientation.z, orientation.w])
np.save(dir_name + "/map_data_{}.npy".format(self.keyNum), map_data)
if self.saveimg:
cv2.imwrite(dir_name + "/rgb_data_{}.jpg".format(self.keyNum), rgb)
rospy.sleep(0.5)
else:
print("wait")
def getData(self):
return self.pos_np, self.orientation_np, self.map_data_np, self.map_meta_data_np
def save(self, once=True, vedio=True):
# self.data["pos"] = self.pos_np
# self.data["orientation"] = self.orientation_np
dir_name = "data_agx3"
if not os.path.exists(dir_name):
os.makedirs(dir_name)
if not once:
np.save(dir_name + "/" + "pos.npy", self.pos_np)
np.save(dir_name + "/" + "orientation.npy", self.orientation_np)
np.save(dir_name + "/" + "map_data.npy", self.map_data_np)
np.save(dir_name + "/" + "map_meta_data.npy", self.map_meta_data_np)
if vedio:
np.save(dir_name + "/" + "rgb_callback_np.npy", self.rgb_callback_np)
np.save(dir_name + "/" + "depth_callback_np.npy", self.depth_callback_np)
rospy.loginfo("rgb_callback_np saved %f data", len(self.rgb_callback_np))
rospy.loginfo("depth_callback_np saved %f data", len(self.depth_callback_np))
def visualMap(self):
map = self.map
map_meta_data = map.info
map_data = np.array(map.data).reshape(map_meta_data.width, map_meta_data.height)
row, col = map_data.shape
# print row, col
tmp = np.zeros((row, col))
for i in range(row):
for j in range(col):
if map_data[i][j] == -1:
tmp[i][j] = 255
else:
tmp[i][j] = map_data[i][j]
cv2.imwrite("map_image.png", tmp)
rospy.loginfo("map_image saved")
# cv2.imshow("map", tmp)
# cv2.waitKey(0)
def getMap(self):
return self.map
if __name__ == '__main__':
rospy.init_node('msg2npy', anonymous=True)
data2npy = getMsg()
curNum = 0
rospy.loginfo("Ready to rec msg and save")
data2npy.msg2npy()
keyboard.py如下 运行环境是python2
#!/usr/bin/env python2
# -*-coding:utf-8-*
import rospy
from pynput import keyboard
from help import getMsg
if __name__ == '__main__':
try:
rospy.init_node('keyboard_control', anonymous=True)
print("按空格键来增加计数。")
data2npy = getMsg(check_topic=True, saveimg=True)
# 收听键盘事件
listener = keyboard.Listener(on_press=data2npy.onPress)
listener.start()
# 保持节点运行直到被关闭
rospy.spin()
except rospy.ROSInterruptException:
pass
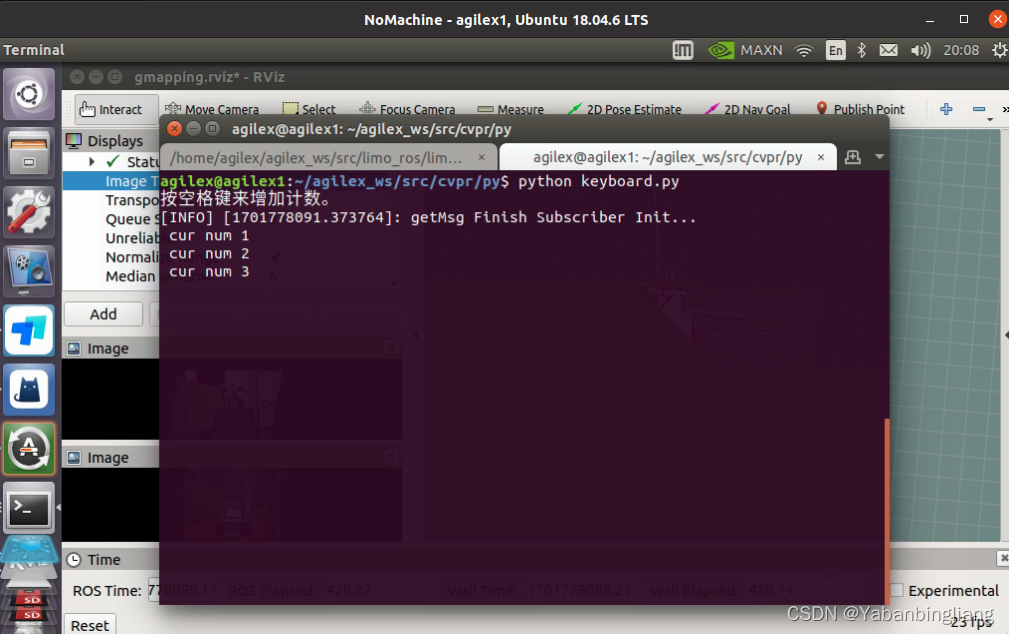
启动后实现的效果如图
多个机器人通信和控制
1. ros的多机通信
我这里的实验硬件配置是三台Agilex的Limo小车(Ubuntu 18.04),一台笔记本(Ubuntu 20.04)和一个无线路由器,四台电脑同时在一个局域网。
ros多机通信参考是赵虚左老师的博客 link
这部分需要做的就是设置好主机和从机的环境变量以及IP,通过修改 .bashrc 和 /etc/hosts 两个文件实现
1.1 主机
在 .bashrc 中添加如下两行, 192.168.1.101 是笔记本(主机)在局域网内的ip地址,通过 ifconfig 命令可以查看到,没有这个命令的话安装一下就好了。
export ROS_MASTER_URI=http://192.168.1.101:11311
export ROS_HOSTNAME=192.168.1.101
第一行的意思是将master设置在主机上(四台电脑都是ros1,是有ros master的,ros2就没有master了)。第二行是把 ROS_HOSTNAME 设置为本机的ip地址就好了。
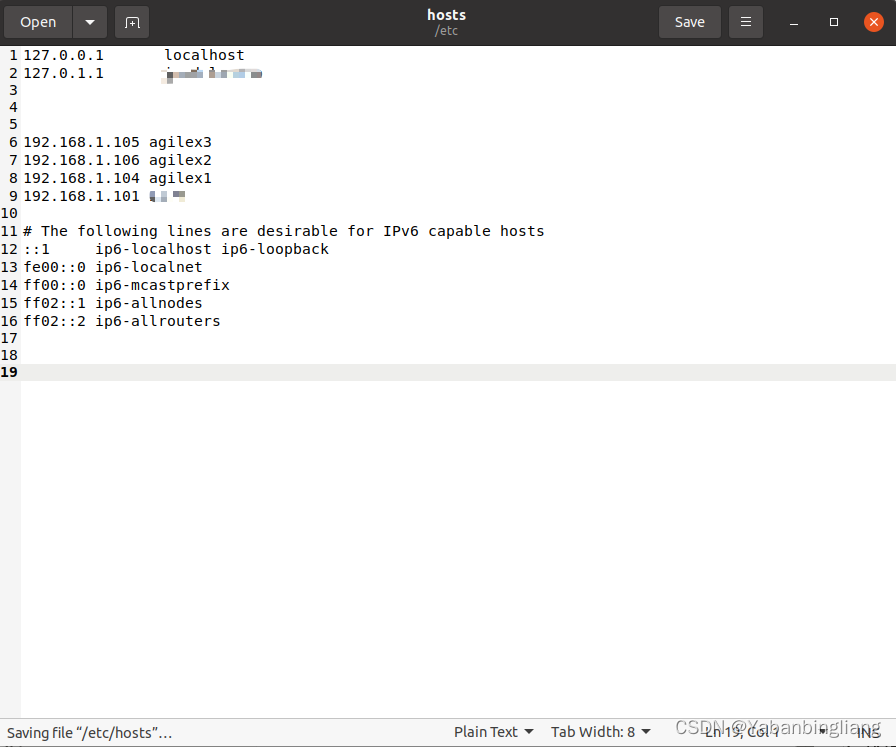
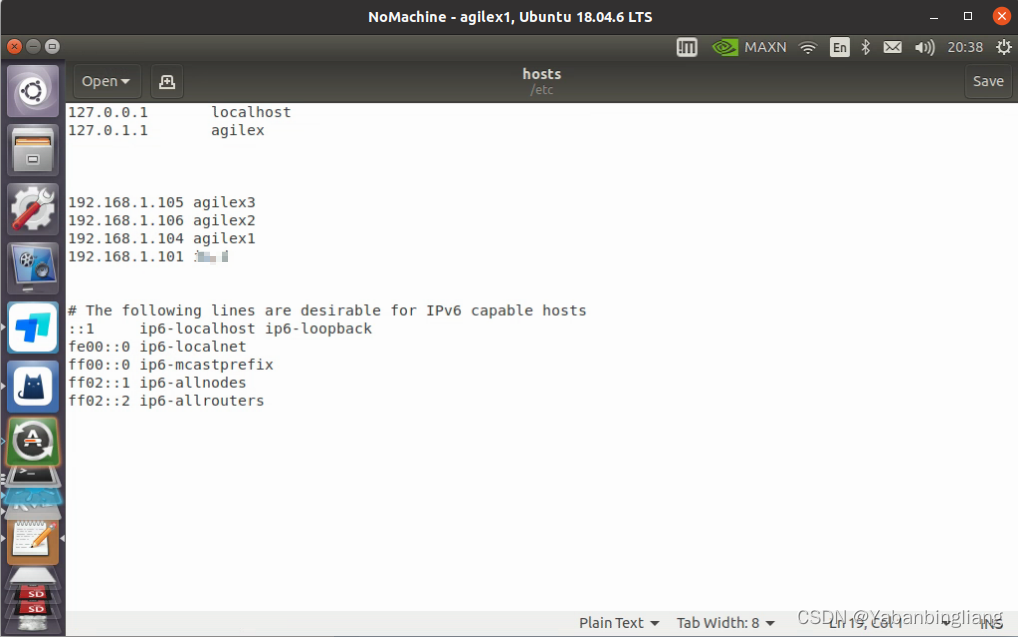
在 /etc/hosts 中添加如下几行
192.168.1.105 agilex3
192.168.1.106 agilex2
192.168.1.104 agilex1
192.168.1.101 xxxx(主机的用户名,就是终端 xx@xxx @前面那个)
这几行的意思就是把局域网内若干主机的ip地址和用户名对应起来,添加后如图。
1.2 从机(以limo1为例)
在 .bashrc 中添加如下两行, 192.168.1.101 是笔记本(主机)在局域网内的ip地址,192.168.1.104 是agilex1(从机)在局域网内的ip地址。
export ROS_MASTER_URI=http://192.168.1.101:11311
export ROS_HOSTNAME=192.168.1.104
在 /etc/hosts 中添加如下几行
192.168.1.105 agilex3
192.168.1.106 agilex2
192.168.1.104 agilex1
192.168.1.101 xxxx
其实无论是主机还是从机,/etc/hosts 中需要添加的内容都是一样的,就是把局域网内若干主机的ip地址和用户名对应起来,添加后如图。
1.3 验证
做好上述准备工作之后,就要检验一下子了。验证的方式也很简单,笔记本(master)启动roscore,如果每个从机都能看到话题,那就说明ros的多机通信是没有问题了。当然也可以用稍微复杂的方式来验证,分别在三台不同的主机上启动如下三行命令移动小乌龟了!
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
2. 话题(topic)重映射
话题(topic)重映射指的是将ros中节点的某个话题重新修改一个名字就叫作话题重映射。为什么需要话题重映射呢?因为如果每个机器人都启动完全相同的节点,那么话题肯定会重复的,一定会发生冲突的,无法实现给不同的机器人不同的命令,所以话题重映射是多机协同必须的一步。
在获取单个机器人数据的时候,为了方便启动机器人的底盘、gmapping和相机,我把 roslaunch 启动都放到一个sh脚本中了。
启动文件 single.sh
gnome-terminal --window -e "roslaunch limo_bringup limo_start.launch pub_odom_tf:=false" & sleep 7s
gnome-terminal --window -e "roslaunch limo_bringup limo_gmapping.launch" & sleep 3s
gnome-terminal --window -e "roslaunch astra_camera dabai_u3.launch"
而在多机协同的时候,每一个roslaunch 的启动都需要修改里面节点的话题,下面来详细说明每一个launch文件是怎么修改的。
2.1 limo_start.launch → my_limo_start.launch
原limo_start.launch如下
<?xml version="1.0"?>
<launch>
<!-- ttyTHS1 for NVIDIA nano serial port-->
<!-- ttyUSB0 for IPC USB serial port -->
<arg name="port_name" default="ttyTHS1" />
<arg name="use_mcnamu" default="false" />
<arg name="pub_odom_tf" default="" />
<include file="$(find limo_base)/launch/limo_base.launch">
<arg name="port_name" default="$(arg port_name)" />
<arg name="use_mcnamu" default="$(arg use_mcnamu)" />
<arg name="pub_odom_tf" default="$(arg pub_odom_tf)" />
</include>
<include file="$(find ydlidar_ros)/launch/X2L.launch" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_camera_link" args="0.105 0 0.1 0.0 0.0 0.0 /base_link /camera_link 10" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_imu_link" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /imu_link 10" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser_link" args="0.105 0.0 0.08 0.0 0.0 0.0 /base_link /laser_link 10" />
</launch>
简单分析以下,这个launch文件包含了 limo_base.launch X2L.launch 并作了三个静态的坐标变化。这三个部分就都需要作相应的修改,my_limo_start.launch具体如下:
<?xml version="1.0"?>
<launch>
<!-- ttyTHS1 for NVIDIA nano serial port-->
<!-- ttyUSB0 for IPC USB serial port -->
<arg name="port_name" default="ttyTHS1" />
<arg name="use_mcnamu" default="false" />
<arg name="pub_odom_tf" default="" />
<arg name="rb_name" default="limo_1" />
<arg name="odom_frame" default="odom" />
<arg name="base_frame" default="base_link" />
<!-- <group ns="$(arg second_tb3)/map_merge"> -->
<group ns="$(arg rb_name)">
<node name="limo_base_node" pkg="limo_base" type="limo_base_node" output="screen" >
<param name="port_name" value="$(arg port_name)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="use_mcnamu" value="$(arg use_mcnamu)" />
<param name="pub_odom_tf" value="$(arg pub_odom_tf)" />
<!-- <param name="rb_name" value="$(arg rb_name)" /> -->
<remap from="/odom" to="/$(arg rb_name)/odom" />
<remap from="/cmd_vel" to="/$(arg rb_name)/cmd_vel" />
<remap from="/imu" to="/$(arg rb_name)/imu" />
<remap from="/limo_status" to="/$(arg rb_name)/limo_status" />
</node>
<include file="$(find ydlidar_ros)/launch/my_X2L.launch" >
<arg name="rb_name" value="$(arg rb_name)" />
</include>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_camera_link" args="0.105 0 0.1 0.0 0.0 0.0 $(arg rb_name)/base_link $(arg rb_name)/camera_link 10" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_imu_link" args="0.0 0.0 0.0 0.0 0.0 0.0 $(arg rb_name)/base_link $(arg rb_name)/imu_link 10" />
<node pkg="tf" type="static_transform_publisher" name="base_link_to_laser_link" args="0.105 0.0 0.08 0.0 0.0 0.0 $(arg rb_name)/base_link $(arg rb_name)/laser_link 10" />
</group>
</launch>
<group ns="$(arg rb_name)">标签是添加命名空间,这样这个标签内启动的所有的节点名字签名都会有rb_name这个前缀
<remap from="/odom" to="/$(arg rb_name)/odom" /> 是将节点的话题重新映射,注意不要忽略to里面第一个 \ ,否则会出现重复的前缀。(这部分涉及到的知识点好像是ros中的全局命名和私有命令,有点忘记了)
其它的话题也是同理
关于静态坐标变化也是同样的添加若干个变量前缀即可
最后是 my_X2L.launch 中主要是添加了一个变量,然后通过传递修改一下 frame_id , 别的就没有了
<launch>
<!-- <arg name="rb_name" default="limo_3" /> -->
<arg name="rb_name"/>
<node name="ydlidar_node" pkg="ydlidar_ros" type="ydlidar_node" output="screen" respawn="false" >
<param name="port" type="string" value="/dev/ydlidar"/>
<param name="baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="/$(arg rb_name)/laser_link"/>
<param name="resolution_fixed" type="bool" value="true"/>
<param name="auto_reconnect" type="bool" value="true"/>
<param name="reversion" type="bool" value="true"/>
<param name="angle_min" type="double" value="-90" />
<param name="angle_max" type="double" value="90" />
<param name="range_min" type="double" value="0.1" />
<param name="range_max" type="double" value="12.0" />
<param name="ignore_array" type="string" value="" />
<param name="frequency" type="double" value="8"/>
<param name="samp_rate" type="int" value="3"/>
<param name="isSingleChannel" type="bool" value="true"/>
</node>
</launch>
2.2 limo_gmapping.launch →my_limo_gmapping.launch
原limo_gmapping.launch如下
<?xml version="1.0"?>
<launch>
<!-- use robot pose ekf to provide odometry-->
<node pkg="robot_pose_ekf" name="robot_pose_ekf" type="robot_pose_ekf">
<param name="output_frame" value="odom" />
<param name="base_footprint_frame" value="base_link"/>
<!--<remap from="imu_data" to="imu" />-->
</node>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find limo_bringup)/rviz/gmapping.rviz" />
</launch>
修改后的my_limo_gmapping.launch如下
<?xml version="1.0"?>
<launch>
<arg name="rb_name" default="limo_1" />
<!-- <arg name="set_base_frame" default="$(arg rb_name)/base_link"/>
<arg name="set_odom_frame" default="$(arg rb_name)/odom"/>
<arg name="set_map_frame" default="$(arg rb_name)/map"/> -->
<!-- use robot pose ekf to provide odometry-->
<group ns="$(arg rb_name)">
<node pkg="robot_pose_ekf" name="robot_pose_ekf" type="robot_pose_ekf">
<param name="output_frame" value="/$(arg rb_name)/odom" />
<param name="base_footprint_frame" value="/$(arg rb_name)/base_link"/>
<!--<remap from="imu_data" to="imu" />-->
</node>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg rb_name)/base_link"/>
<param name="odom_frame" value="$(arg rb_name)/odom"/>
<param name="map_frame" value="$(arg rb_name)/map"/>
<remap from="scan" to="/$(arg rb_name)/scan"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</group>
<node pkg="rviz" type="rviz" name="rviz_1" args="-d $(find limo_bringup)/rviz/multi_gmapping.rviz" />
</launch>
主要修改就是给一些参考系加个前缀,还有就是话题重映射,修改的内容如下
<param name="output_frame" value="/$(arg rb_name)/odom" />
<param name="base_footprint_frame" value="/$(arg rb_name)/base_link"/>
<param name="base_frame" value="$(arg rb_name)/base_link"/>
<param name="odom_frame" value="$(arg rb_name)/odom"/>
<param name="map_frame" value="$(arg rb_name)/map"/>
<remap from="scan" to="/$(arg rb_name)/scan"/>
2.3 dabai_u3.launch
这部分最省事了,因为小车来的时候本身安装好了相机的驱动,然后里面考虑到了相机前缀的问题了,所以就改个名字就好了,哈哈哈哈和。
<arg name="camera" default="camera" />
启动文件 multi.sh
为了能够保留原来所有single的功能,修改的launch文件基本上都是复制个副本,然后在副本里面进行修改,所以最后启动的sh就变成下面这个样子了
gnome-terminal --window -e "roslaunch limo_bringup my_limo_start.launch pub_odom_tf:=false" & sleep 7s
gnome-terminal --window -e "roslaunch limo_bringup my_limo_gmapping.launch" & sleep 3s
gnome-terminal --window -e "roslaunch astra_camera dabai_u3.launch"
2.4 验证
完成了上述工作之后,也需要做个简单的检验。验证的方式和之前也是类似的,在笔记本上启动 roscore,三台小车都启动 multi.sh ,然后各个小车都有独立的话题和节点就可以了,还可以通过 rostopic pub 小车cmd 看看能不能单独控制小车。
好了,到此为止,终于算是完成了ros多机协同的基本配置了,接下来就是写代码获取机器人的数据并控制了~
3. 编程
以下所有代码均在笔记本(python3)的环境下完成的
multi_robot.py
#!/usr/bin/env python3
import rospy
import tf
import math
import numpy as np
import cv2
import os
# from cv2 import CvBridge
from cv_bridge import CvBridge
from sensor_msgs.msg import Image
from geometry_msgs.msg import Twist
from geometry_msgs.msg import TwistStamped
from nav_msgs.msg import Odometry
from nav_msgs.msg import OccupancyGrid
from cvpr.msg import control
from pynput import keyboard
# from cvpr.msg import control
# from help import getMsg
class Robot():
def __init__(self, rb_name="limo_1", check_topic=False):
self.rb_name = rb_name
self.rgb_count = 0
self.depth_count = 0
self.rgb = None
self.depth = None
self.odom = None
self.pos = None
self.orientation = None
self.map =None
self.rgb_init = False
self.depth_init = False
self.odom_init = False
self.map_init = False
self.moveMsg = Twist()
self.moveMsg.linear.x = 0
self.moveMsg.linear.y = 0
self.moveMsg.linear.z = 0
self.moveMsg.angular.x = 0
self.moveMsg.angular.y = 0
self.moveMsg.angular.z = 0
self.curYaw = 0
self.cv_bridge = CvBridge()
camera_prefix = "camera" + self.rb_name[-1]
# print(camera_prefix)
self.rgb_sub = rospy.Subscriber(camera_prefix + "/rgb/image_raw", Image, self.rgb_callback)
self.depth_sub = rospy.Subscriber(camera_prefix + "/depth/image_raw", Image, self.depth_callback)
self.odom_sub = rospy.Subscriber(self.rb_name + "/odom", Odometry, self.odom_callback)
self.map_sub = rospy.Subscriber(self.rb_name + "/map", OccupancyGrid, self.map_callback)
self.type_sub = rospy.Subscriber(self.rb_name + "/type", control, self.type_rec_callback)
self.type_pub = rospy.Publisher(self.rb_name + '/cmd_vel', Twist, queue_size = 1)
if check_topic:
rospy.loginfo("%s Start Subscriber Init...", rb_name)
while not self.rgb_init:
continue
while not self.depth_init:
continue
while not self.odom_init:
continue
while not self.map_init:
continue
rospy.loginfo("%s Finish Subscriber Init...", rb_name)
else:
rospy.loginfo("%s Jump Subscriber Init...", rb_name)
def rgb_callback(self, msg):
self.rgb_init = True
tmp = msg
# self.rgb = msg
# self.rgb_count += 1
# dir_name = "rgb_" + self.rb_name
# if not os.path.exists(dir_name):
# os.makedirs(dir_name)
# way1
cv_image = self.cv_bridge.imgmsg_to_cv2(tmp, "bgr8")
self.rgb = np.array(cv_image)
# way2
# cv_img = np.frombuffer(tmp.data, dtype=np.uint8).reshape(tmp.height, tmp.width, -1)
# cv_img = cv2.cvtColor(cv_img, cv2.COLOR_RGB2BGR)
# self.rgb = np.array(cv_img)
# print(self.rgb.shape)
# way1
# np.save(dir_name + "/rgb_data_{}.npy".format(self.rgb_count), self.rgb)
# way2
# cv2.imwrite(dir_name + "/rgb_data_{}.jpg".format(self.rgb_count), self.rgb)
# rospy.loginfo("%s rgb count: %d", self.rb_name, self.rgb_count)
def depth_callback(self, msg):
self.depth_init = True
tmp = msg
self.depth_count += 1
# self.depth = msg
cv_image = self.cv_bridge.imgmsg_to_cv2(tmp, desired_encoding="32FC1")
self.depth = np.array(cv_image)
# dir_name = "depth_" + self.rb_name
# if not os.path.exists(dir_name):
# os.makedirs(dir_name)
# print(self.depth.shape)
# cv2.imwrite(dir_name + "/depth_data_{}.jpg".format(self.depth_count), self.depth)
# self.depth_count += 1
# rospy.loginfo("%s depth count: %d", self.rb_name, self.depth_count)
def odom_callback(self, msg):
self.odom_init = True
self.odom = msg
self.pos = [self.odom.pose.pose.position.x, self.odom.pose.pose.position.y, self.odom.pose.pose.position.z]
self.orientation = [self.odom.pose.pose.orientation.x, self.odom.pose.pose.orientation.y,
self.odom.pose.pose.orientation.z, self.odom.pose.pose.orientation.w]
# print(self.orientation)
# print(self.pos)
(_, _, yaw) = tf.transformations.euler_from_quaternion(self.orientation)
if yaw < 0:
yaw += 2 * math.pi
self.curYaw = yaw
def map_callback(self, msg):
self.map_init = True
tmp = msg
self.map = np.array(tmp.data).reshape(tmp.info.width, tmp.info.height)
# print(self.map.shape)
# print(self.map)
def type_rec_callback(self, data):
# rospy.loginfo("Received control message: %d", data.type)
if data.type == 8:
self.moveMsg.linear.x = 0
self.moveMsg.linear.y = 0
self.moveMsg.linear.z = 0
self.moveMsg.angular.x = 0
self.moveMsg.angular.y = 0
self.moveMsg.angular.z = 0
self.moveMsg.linear.x = 0.1
rospy.loginfo("%s Received control message: %d forward", self.rb_name, data.type)
elif data.type == 2:
self.moveMsg.linear.x = 0
self.moveMsg.linear.y = 0
self.moveMsg.linear.z = 0
self.moveMsg.angular.x = 0
self.moveMsg.angular.y = 0
self.moveMsg.angular.z = 0
self.moveMsg.linear.x = -0.1
rospy.loginfo("%s Received control message: %d backward", self.rb_name, data.type)
elif data.type == 4:
self.moveMsg.linear.x = 0
self.moveMsg.linear.y = 0
self.moveMsg.linear.z = 0
self.moveMsg.angular.x = 0
self.moveMsg.angular.y = 0
self.moveMsg.angular.z = 0
self.moveMsg.angular.z = 0.3
rospy.loginfo("%s Received control message: %d left turn", self.rb_name, data.type)
elif data.type == 6:
self.moveMsg.linear.x = 0
self.moveMsg.linear.y = 0
self.moveMsg.linear.z = 0
self.moveMsg.angular.x = 0
self.moveMsg.angular.y = 0
self.moveMsg.angular.z = 0
self.moveMsg.angular.z = -0.3
rospy.loginfo("%s Received control message: %d right turn", self.rb_name, data.type)
else:
rospy.loginfo("%s Received control message: %d STOP", self.rb_name, data.type)
self.moveMsg.linear.x = 0
self.moveMsg.angular.z = 0
self.type_pub.publish(self.moveMsg)
def getData(self):
return [self.pos, self.orientation, self.rgb, self.depth, self.map]
def getAngle(self):
return math.degrees(self.curYaw)
class MultiRobot():
def __init__(self, all_check_topic=True):
self.rb3 = Robot(rb_name="limo_3", check_topic=all_check_topic)
self.rb2 = Robot(rb_name="limo_2", check_topic=all_check_topic)
self.rb1 = Robot(rb_name="limo_1", check_topic=all_check_topic)
self.data_count = 0
self.merge_map = None
self.merge_map_init = False
self.merge_map_sub = rospy.Subscriber("/map", OccupancyGrid, self.merge_map_callback)
def merge_map_callback(self, msg):
self.merge_map_init = True
tmp ~~= msg
self.merge_map = np.array(tmp.data).reshape(tmp.info.width, tmp.info.height)~~
def onPress(self, key):
# print(key)
# return [self.pos, self.orientation, self.rgb, self.depth, self.map]
dir_name = "data"
if not os.path.exists(dir_name):
os.makedirs(dir_name)
rb1_dir = dir_name + "/" + self.rb1.rb_name
if not os.path.exists(rb1_dir):
os.makedirs(rb1_dir)
rb2_dir = dir_name + "/" + self.rb2.rb_name
if not os.path.exists(rb2_dir):
os.makedirs(rb2_dir)
rb3_dir = dir_name + "/" + self.rb3.rb_name
if not os.path.exists(rb3_dir):
os.makedirs(rb3_dir)
if key == keyboard.Key.space:
self.data_count += 1
print(self.data_count)
data_rb1 = self.rb1.getData()
data_rb2 = self.rb2.getData()
data_rb3 = self.rb3.getData()
# print(data_rb1[0])
# np.save(rb1_dir + "/pos_{}.npy".format(self.data_count), [0, 0, 0])
np.save(rb1_dir + "/pos_{}.npy".format(self.data_count), data_rb1[0])
np.save(rb1_dir + "/orientation_{}.npy".format(self.data_count), data_rb1[1])
np.save(rb1_dir + "/map_data_{}.npy".format(self.data_count), data_rb1[4])
np.save(rb2_dir + "/pos_{}.npy".format(self.data_count), data_rb2[0])
np.save(rb2_dir + "/orientation_{}.npy".format(self.data_count), data_rb2[1])
np.save(rb2_dir + "/map_data_{}.npy".format(self.data_count), data_rb2[4])
np.save(rb3_dir + "/pos_{}.npy".format(self.data_count), data_rb3[0])
np.save(rb3_dir + "/orientation_{}.npy".format(self.data_count), data_rb3[1])
np.save(rb3_dir + "/map_data_{}.npy".format(self.data_count), data_rb3[4])
else:
print("wait")
if __name__ == '__main__':
try:
rospy.init_node('multi_robot', anonymous=True)
multi_robot = MultiRobot()
# pos, orientation, rgb, depth, map_data = multi_robot.rb2.getData()
# print(pos) #list
# print(orientation) #list
# print(rgb.shape) #numpy
# print(depth.shape) #numpy
# print(map_data.shape) #numpy
rospy.spin()
except rospy.ROSInterruptException:
pass
其实就是定义了 Robot 和 MultiRobot 两个类,在Robot 里面实现简单的话题数据获取和话题控制,然后在MultiRobot 里面实例化三个Robot ,Robot的具体实现细节和单个机器人几乎每什么差,就是注意一下各种命名。
然后有个自定义消息 control ,这个也很简单,就定义了一个八字节的变量,因为师兄想要的就是能前后左右动就可以了,比较简单。
int8 type
里面有很多测试的代码注释了,还有其他的一些相同功能的替代方法,懒得整理了,各位观众老爷看个乐子,不要喷俺
其中有一行 self.merge_map_sub = rospy.Subscriber("/map", OccupancyGrid, self.merge_map_callback) ,这块是师兄一开始想用multi_map_merge,我也跑通了。但是后来吧,我用的无初始点的方式测试了好多遍,效果不是很显示,最重要的是师兄发现这个功能包给不了他想要的东西(简直是白弄了阿qaq),也就拉倒了。
验证
然后写完代码,当然是要验证拉~
这部分就是通过敲击一次空格,然后能够保存三个机器人的odom、rgb、depth和map这么几组信息就说明是没有问题了~
multi_keyboard.py
#!/usr/bin/env python3
# -*-coding:utf-8-*
import rospy
from pynput import keyboard
from multi_robot import MultiRobot
count = 0
def on_press(key):
global count
if key == keyboard.Key.space:
count += 1
print(count)
if __name__ == '__main__':
try:
rospy.init_node('keyboard_counter', anonymous=True)
rospy.loginfo("按空格键来增加计数。")
multi_robot = MultiRobot(all_check_topic=True)
# 收听键盘事件
# listener = keyboard.Listener(on_press=on_press)
listener = keyboard.Listener(on_press=multi_robot.onPress)
listener.start()
# 保持节点运行直到被关闭
rospy.spin()
except rospy.ROSInterruptException:
pass
还有就是需要验证机器人确实能够被独立的控制,这里我是让三个机器人作左转和右转,然后转的角速度不同,这样就能验证三个机器人是不是同时被独立控制了。
multi_control.py
import rospy
from multi_robot import MultiRobot
from cvpr.msg import control
from pynput import keyboard
if __name__ == "__main__":
rospy.init_node('test_msg', anonymous=True)
multi_limo = MultiRobot(all_check_topic=True)
# return [self.pos, self.orientation, self.rgb, self.depth, self.map]
[rb1_pos, rb1_orientation, rb1_rgb, rb1_depth, rb1_map] = multi_limo.rb1.getData()
[rb2_pos, rb2_orientation, rb2_rgb, rb2_depth, rb2_map] = multi_limo.rb2.getData()
[rb3_pos, rb3_orientation, rb3_rgb, rb3_depth, rb3_map] = multi_limo.rb3.getData()
n = 100
multi_limo.rb1.rgb_save = True
multi_limo.rb2.rgb_save = True
multi_limo.rb3.rgb_save = True
multi_limo.rb1.depth_save = True
multi_limo.rb2.depth_save = True
multi_limo.rb3.depth_save = True
while not rospy.is_shutdown():
multi_limo.rb1.move(n=1, type=6, angular=0.3)
multi_limo.rb2.move(n=1, type=4, angular=0.5)
multi_limo.rb3.move(n=1, type=6, angular=1.0)
rospy.sleep(1)
if n <= 0:
multi_limo.rb1.rgb_save = False
n -= 1
# print(rb1_pos)
# print(rb2_orientation)
# print(rb3_map)
rospy.spin()
至此,为了能够完成多机协同需要做的多机通信和控制就全部完成了,如果有不合理或者不合适的地方,欢迎批评指正,希望我的学习过程对你能够有所帮助~















 900
900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









