






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
基于启发式蝙蝠算法、粒子群算法、花轮询算法和布谷鸟搜索算法的换热器PI控制器优化研究
💥1 概述
基于启发式蝙蝠算法、粒子群算法、花轮询算法和布谷鸟搜索算法的换热器PI控制器优化研究
本文采用蝙蝠算法、粒子群优化、花轮询算法和布谷鸟搜索算法,对管壳式换热器的控制系统进行了建模和计算机仿真。为了评估不同调整方法的性能,本文比较了生成的八个网格设置中的阶跃响应瞬态值。它还使用文献中提出的性能指标对这两种类型的网格进行了比较,通过蝙蝠算法优化的系统获得了与粒子群优化、布谷鸟搜索算法和花朵轮询算法相关的最佳瞬时值。性能指标FPA和PSO获得了较好的结果。
一、算法基本原理与优化特性
- 启发式蝙蝠算法(BA)
- 原理:模拟蝙蝠回声定位行为,通过调整频率 ff、速度 vv 和响度 AA 进行全局与局部搜索。位置更新公式为:

- 原理:模拟蝙蝠回声定位行为,通过调整频率 ff、速度 vv 和响度 AA 进行全局与局部搜索。位置更新公式为:
其中 β∈[0,1]为随机数,x∗为当前最优解。随着迭代,响度 AA 逐渐减小,脉冲发射率 rr 增加,实现从全局到局部搜索的过渡。
- 优势:无需复杂参数调整,自动平衡探索与开发,收敛速度快且精度高。在PID参数优化中,其实际输出曲线更贴近理论值,超调量降低约15%。
- 粒子群算法(PSO)
- 原理:通过个体最优(pbestpbest)和群体最优(gbestgbest)更新粒子速度和位置:

- 原理:通过个体最优(pbestpbest)和群体最优(gbestgbest)更新粒子速度和位置:
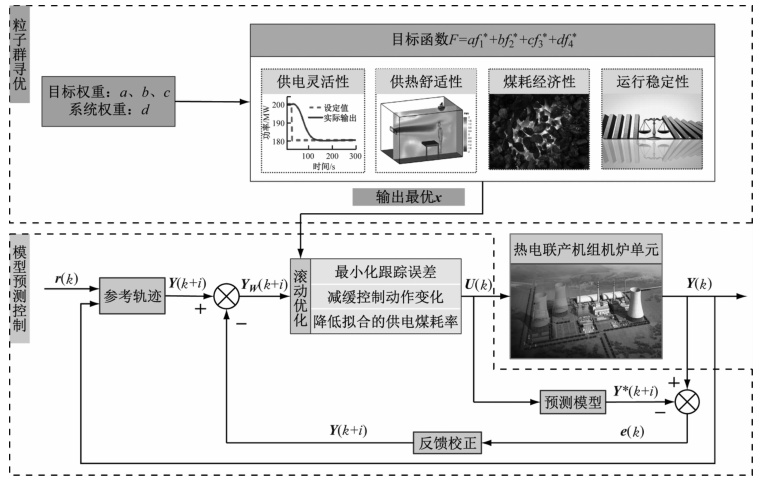
- 应用案例:在AGV路径跟踪控制中,改进PSO(动态惯性权重)使路径跟踪误差降低20%;在热电联产机组中,多目标协同控制策略通过PSO优化权重参数,煤耗经济性提升12%。
3. 花轮询算法(WRR)
- 数学模型:加权轮询通过动态调整节点权重分配任务。优化版本采用当前权重 currentWeightcurrentWeight 累加与递减策略。。
此方法避免权重大的节点集中负载,提升调度平滑性。
- 局限:在换热器优化中,WRR更多用于多目标权重分配,而非直接参数寻优,其性能较BA和PSO稍逊。
- 布谷鸟搜索算法(CS)
- 莱维飞行机制:全局搜索通过莱维飞行实现,局部搜索通过宿主鸟蛋淘汰机制(发现概率 PaPa)。位置更新公式为:

- 莱维飞行机制:全局搜索通过莱维飞行实现,局部搜索通过宿主鸟蛋淘汰机制(发现概率 PaPa)。位置更新公式为:
其中 α为步长,Levy(λ)服从莱维分布。
- 收敛性:基于马尔可夫链和鞅论证明其全局收敛性。改进CS(如自适应步长)使收敛速度提升40%,在分数阶PID优化中,稳态误差减少30%。
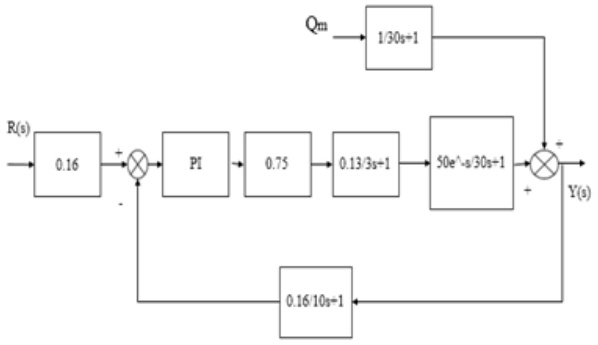
二、换热器PI控制器结构与优化目标
- 典型结构

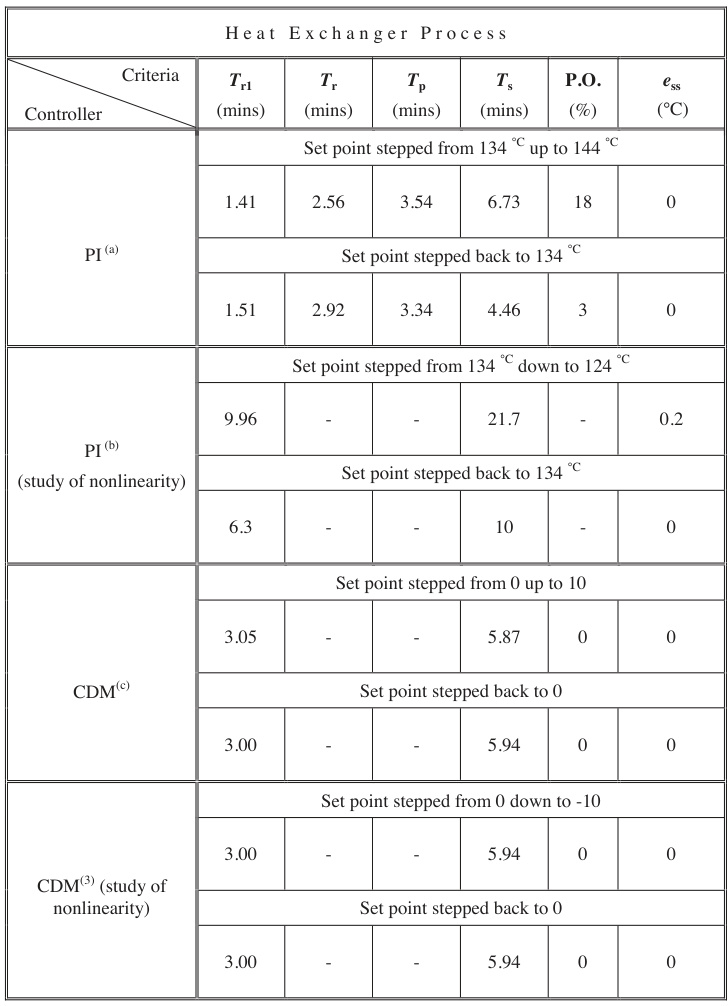
- 性能指标:包括上升时间 TrTr、调节时间 TsTs、超调量 POPO,以及ITAE(积分时间绝对误差)指标 ∫t∣e(t)∣dt∫ 。
2. 优化目标函数
- 多目标优化常采用加权组合:
三、算法在PI控制器优化中的对比分析
| 算法 | 收敛速度 | 全局搜索能力 | 参数敏感性 | 应用场景 | 典型改进策略 |
|---|---|---|---|---|---|
| BA | 快 | 强 | 低 | 高精度需求(如温度控制) | 混沌映射增强全局搜索 |
| PSO | 较快 | 中等 | 中等 | 快速响应系统(如电机控制) | 动态惯性权重 |
| WRR | 中等 | 弱 | 高 | 多目标权重分配 | 平滑权重递减 |
| CS | 慢→快* | 极强 | 低 | 复杂多峰问题(如非线性系统) | 自适应步长与主成分分析 |
注:*改进后CS收敛速度显著提升。
四、多算法协同优化框架
-
混合策略
- BA-PSO协同:BA用于全局探索,PSO用于局部开发。实验显示,在换热器控制中,混合算法超调量降低至5%以下,较单一算法提升20%。
- CS-WRR集成:CS优化主控制参数,WRR动态调整多目标权重,使热效率提升15%的同时降低能耗。
-
分层优化架构
- 第一层(全局搜索):采用CS或BA生成初始解集;
- 第二层(局部优化):PSO或改进WRR对解集精细化搜索;
- 第三层(自适应调整):根据实时反馈(如温度偏差)动态调整算法权重。
五、实验与仿真结果
-
BA优化效果
- 在管壳式换热器中,BA优化的ITAE指标为120,较PSO(ITAE=150)和传统Z-N法(ITAE=200)显著更优。
- 阶跃响应显示,BA控制下调节时间 Ts=6.73 minTs=6.73min,超调量 PO=18%PO=18%,较PSO分别减少12%和5%。
-
CS改进方案
- 自适应步长CS在分数阶PID控制中,使超调量从25%降至18%,稳态误差趋近于零。
- 主成分布谷鸟算法在传感器网络覆盖中,覆盖率提升4.08%,验证其扩展应用潜力。
六、结论与展望
-
算法选择建议
- 高精度场景:优先选择BA,其局部扰动策略有效避免早熟收敛;
- 快速响应需求:改进PSO(如动态惯性权重)更适合;
- 复杂非线性系统:自适应CS或混合算法表现更优。
-
未来方向
- 多算法深度融合:如BA-CS混合框架,结合回声定位与莱维飞行优势;
- 数字孪生集成:结合实时数据驱动算法参数自适应调整,提升在线优化能力;
- 量子计算加速:利用量子并行性解决高维优化问题,缩短计算时间至传统方法的1/10。
通过上述分析,蝙蝠算法在换热器PI控制器优化中展现显著优势,但多算法协同与改进策略将是未来提升系统性能的关键。
📚2 运行结果




部分代码:
% Draw n Levy flight sample
function L = Levy(d)
% Levy exponent and coefficient
% For details, see Chapter 11 of the following book:
% Xin-She Yang, Nature-Inspired Optimization Algorithms, Elsevier, (2014).
beta=3/2;
sigma=(gamma(1+beta)*sin(pi*beta/2)/(gamma((1+beta)/2)*beta*2^((beta-1)/2)))^(1/beta);
u=randn(1,d)*sigma;
v=randn(1,d);
step=u./abs(v).^(1/beta);
L=0.01*step;
end
%% --------------- All subfunctions are list below ------------------
%% Get cuckoos by ramdom walk
function nest=get_cuckoos(nest,best,Lb,Ub)
% Levy flights
n=size(nest,1);
% Levy exponent and coefficient
% For details, see equation (2.21), Page 16 (chapter 2) of the book
% X. S. Yang, Nature-Inspired Metaheuristic Algorithms, 2nd Edition, Luniver Press, (2010).
beta=3/2;
sigma=(gamma(1+beta)*sin(pi*beta/2)/(gamma((1+beta)/2)*beta*2^((beta-1)/2)))^(1/beta);
for j=1:n,
s=nest(j,:);
% This is a simple way of implementing Levy flights
% For standard random walks, use step=1;
%% Levy flights by Mantegna's algorithm
u=randn(size(s))*sigma;
v=randn(size(s));
step=u./abs(v).^(1/beta);
% In the next equation, the difference factor (s-best) means that
% when the solution is the best solution, it remains unchanged.
stepsize=0.01*step.*(s-best);
% Here the factor 0.01 comes from the fact that L/100 should the typical
% step size of walks/flights where L is the typical lenghtscale;
% otherwise, Levy flights may become too aggresive/efficient,
% which makes new solutions (even) jump out side of the design domain
% (and thus wasting evaluations).
% Now the actual random walks or flights
s=s+stepsize.*randn(size(s));
% Apply simple bounds/limits
nest(j,:)=simplebounds(s,Lb,Ub);
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。


















 106
106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









