






作者丨黄浴@知乎
来源丨https://zhuanlan.zhihu.com/p/393208234
编辑丨3D视觉工坊
arXiv在2021年6月上传的综述论文“A Survey on Deep Domain Adaptation for LiDAR Perception“。
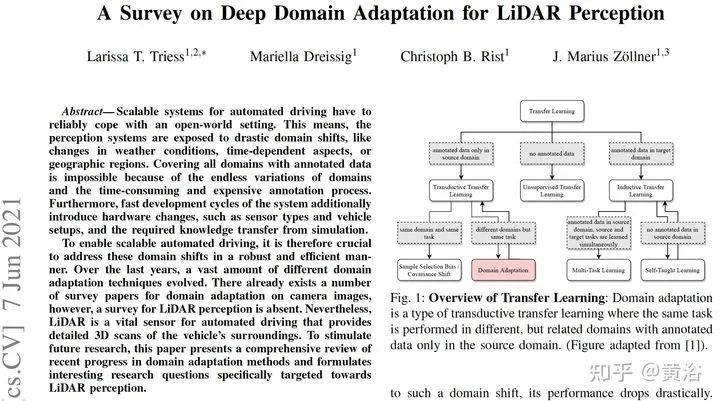
为了实现规模化自动驾驶,需要一个高效的考虑域漂移的方法。这个不是针对视觉感知,而是激光雷达感知的域适应方法回顾。
域适应(DA)是迁移学习(TL)的特例,一种transductive方法,是无监督。域适应可以细分如下:根据学习过程中考虑的类发布而定,分5种(来源于“Unsupervised Domain Adaptation in Semantic Segmentation: a Review”)
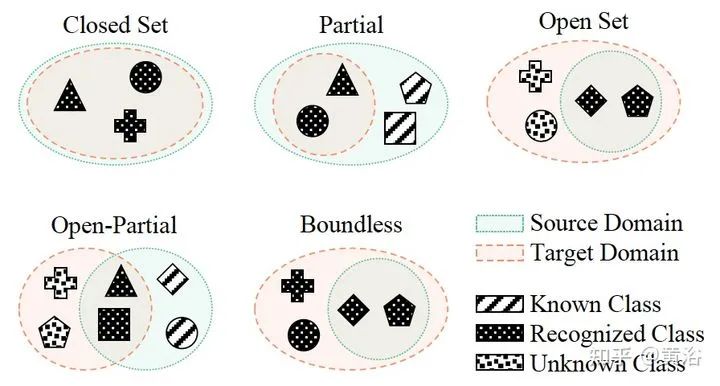
Closed Set DA, 所有类在source domain 和 target domain出现。
Partial DA, 只有source domain 的一部分类出现在 target domain。
Open Set DA,完全没有共享类。
Open-Partial DA,共享和独特类都有。
Boundless DA 是Open Set DA,其中所有目标域的类可以逐个学习。
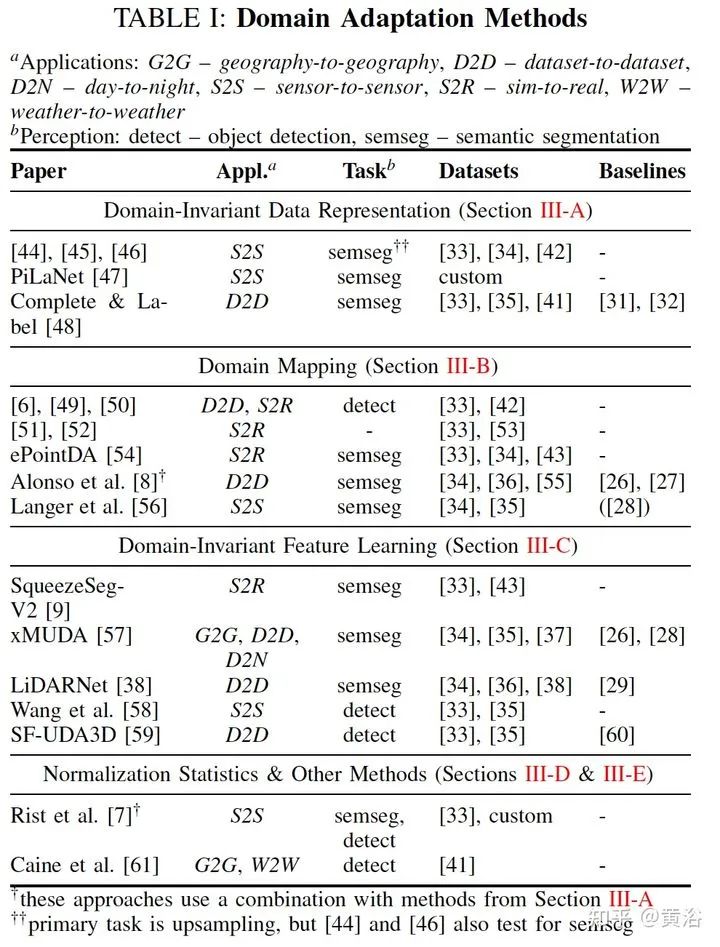
最常见的baseline是entropy minimization方法,其他还有CyCADA,FeaDA和OutDA。
大多数工作的数据集是KITTI, SemanticKITTI, nuScenes, SemanticPOSS, 和 A2D2。
DA的use case:模拟器的采用产生一个新类DA方法 sim-to-real DA;还有geography-to-geography DA,weather-to-weather DA,day-to-night DA(相比摄像头,这种变化不大),sensor-to-sensor DA(姿态设置和内部参数)和 dataset-to-dataset DA。
如下是激光雷达感知的DA分类:基本分数据驱动和模型驱动两个方向
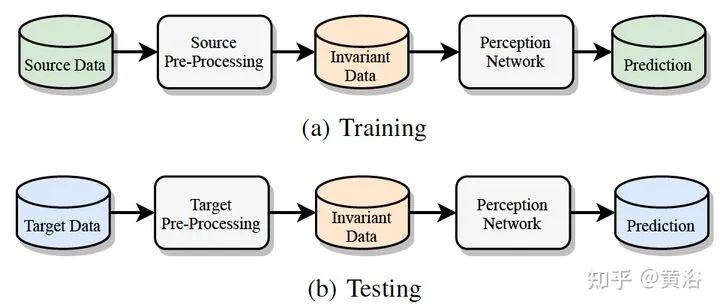
domain-invariant representation方法如图:hand-crafted方法,针对sensor-to-sensor domain shift,做数据预处理,包括Sampling Alignment in 2D Space和Geometric Representation in 3D Space。
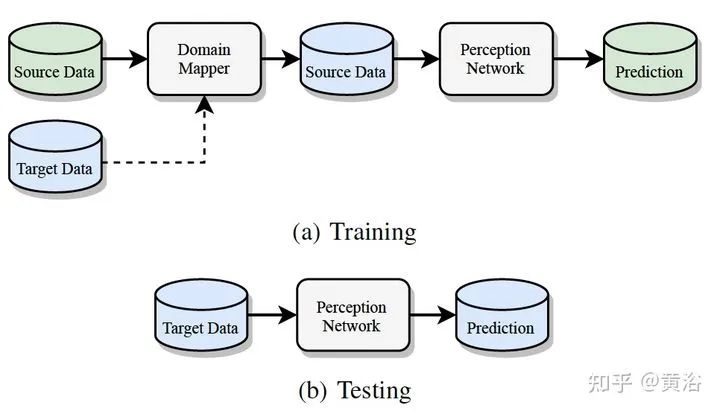
Domain mapping方法如图:主要是sim-to-real 和 dataset-to-dataset DA,域数据迁移,包括Adversarial Domain Mapping和Non-Adversarial Domain Mapping。
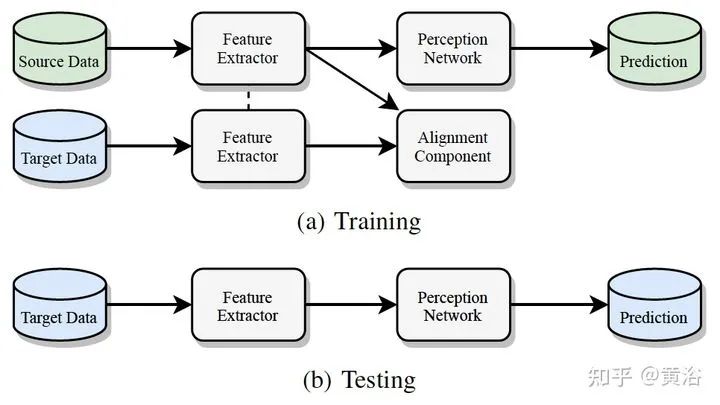
domain-invariant feature learning方法如图:基本是两个原则的方法分类,Divergence Minimization和Discriminator-based 方法。
还有Normalization Statistics及其他方法:在DNN,normalization layers 改进训练收敛性,主要通过对训练数据分布校准(Distribution alignment),这样控制内部covariate shift 和梯度尺度;不过,在图像域有效的方法,即通过每个域不同的batch norm statistics对初始pseudo-labels迭代细化,对激光雷达域的效果没有实验验证过。
最后,文章总结了激光雷达DA面临的主要挑战:
1.Comparability and Transfer from other Modalities:缺乏基准和测度,有些采用图像域的方法做基准。
2.Discrepancies in Domain Gap Quality:测度是model-specific 和 task-specific,但是目前sensor-to-sensor domain gap不好处理。
3.Relevance of Cross-Sensor Adaptation:需要开发sensor-invariant perception systems,建立domain-invariant data representation。
4.Adaptation in Different Weather Scenarios:需要adverse weather scenarios 的数据,这样才可以实现weather-to-weather DA。
5.Generative Models for Domain Translation:adversarial domain mapping方法有限,generative models方法研究不够。
6.Open-Partial Domain Adaptation:好多是研究dataset-to-dataset DA,可是标注类往往不同,这样的问题就是Open-Partial DA,一般是采用label mapping 策略,就转化成为 Closed Set DA 问题来求解。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

















 1983
1983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









