







本文为参考【计算机视觉life】公众号的系列文章:从零开始一起学习SLAM | 点云到网格的进化,实现的点云网格化过程。
网格化流程
- 下采样+统计滤波
通过下采样减少点云数据容量、提高处理速度;使用统计分析技术,去除点云数据集中的噪声、离群点;
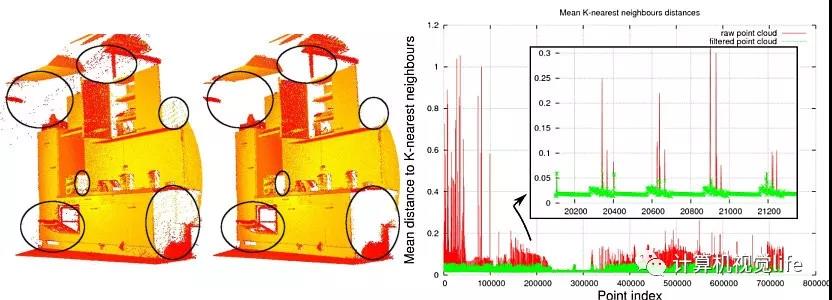
滤波前后对比
- 重采样,平滑处理
通过重采样对物体表面进行平滑处理和漏洞修复
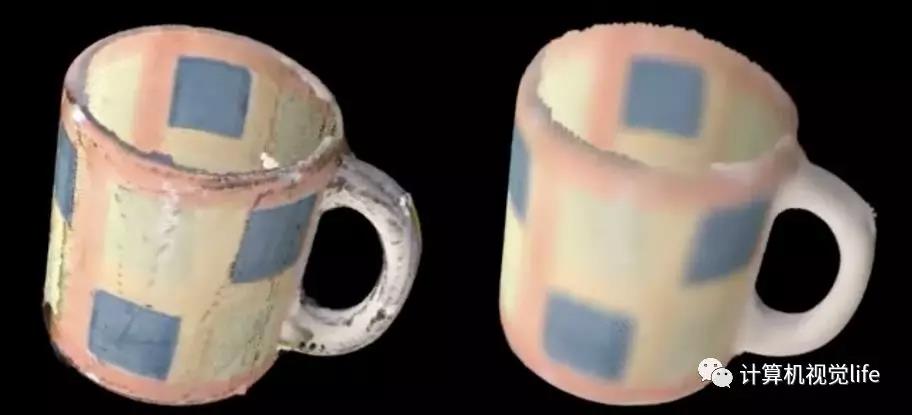
点云平滑前后
- 计算点云表面法线
计算点云法线,并将点云位姿、颜色、法线信息合并到一起,构建有向点云。
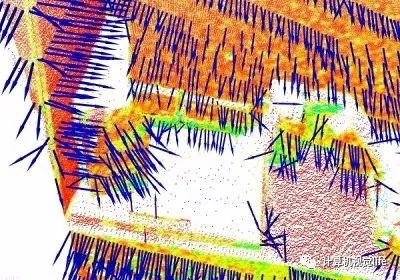
点云表面法线
- 网格化
使用贪心投影三角化算法对有向点云进行三角化,实现稀疏点云的网格化。
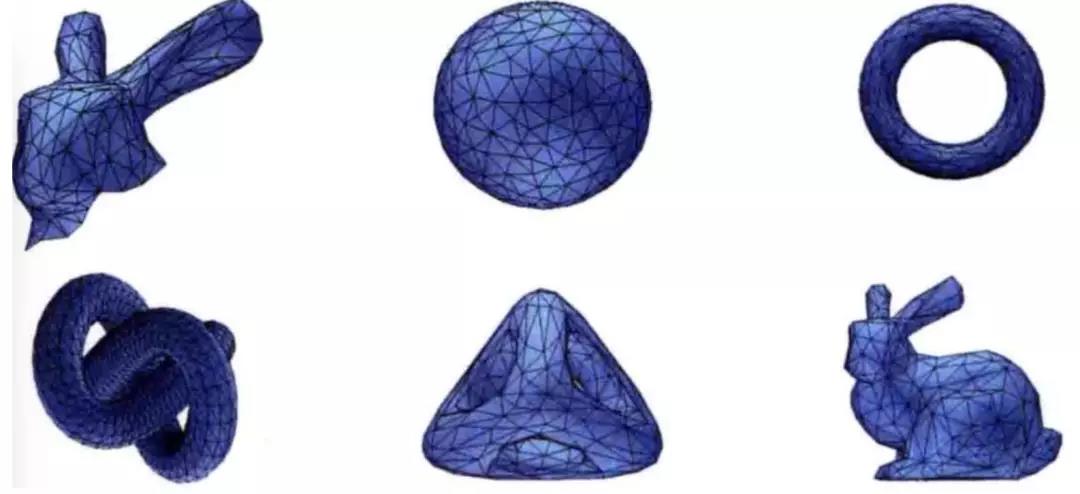
点云网格化示例
代码
/****************************
* 给定稠密的点云,进行如下操作:
* 下采样和滤波、重采样平滑、法线计算,贪心投影网格化。
****************************/
#include <pcl/point_types.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/surface/mls.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/gp3.h>
#include <pcl/surface/poisson.h>
typedef pcl::PointXYZ PointT;
int main(int argc, char** argv)
{
// Load input file
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::PointCloud<PointT>::Ptr cloud_downSampled(new pcl::PointCloud<PointT>);
pcl::PointCloud<PointT>::Ptr cloud_filtered(new pcl::PointCloud<PointT>) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 7142
7142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









