







三.机械臂运动学
基础公式
位置、速度、加速度、时间
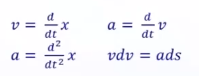
牛顿第二定律
![]()
动量
![]()
机械臂
先学习两个轴之间的关系。
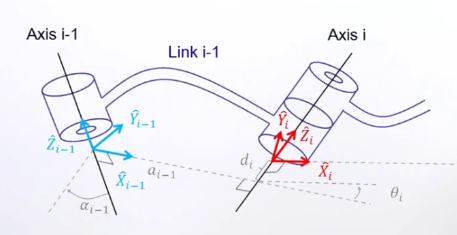
假设两个轴是这样排列的,首先找到一条垂线,使其既垂直于i-1的Z轴,又垂直于i的Z轴。
找到这条线之后,可以定义这样几个量:
是两个轴之间的角度。
是垂线的长度。
d指的是垂直点到轴的距离,如果只在一个平面之内转动,就是零。
指的是现在转动的角度。
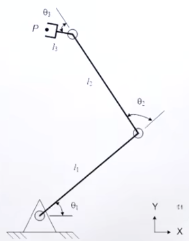
假设有一个长成这样的机械臂
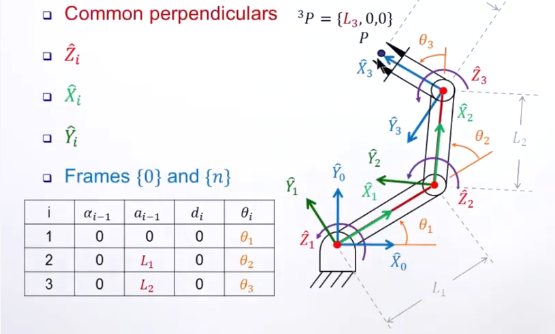
上表中,i的值的意思是轴的编号,1号就是地上的轴,2号就是1号连着的轴,3号就是末端的轴。
在连杆是直线的时候,值为0。
就是相对上一个轴的距离。
d指的是垂直点到轴的距离,如果只在一个平面之内转动,就是零。
指的是现在转动的角度。
下面的机械臂是一个转动的轴,一个移动的轴,末端一个传动的轴
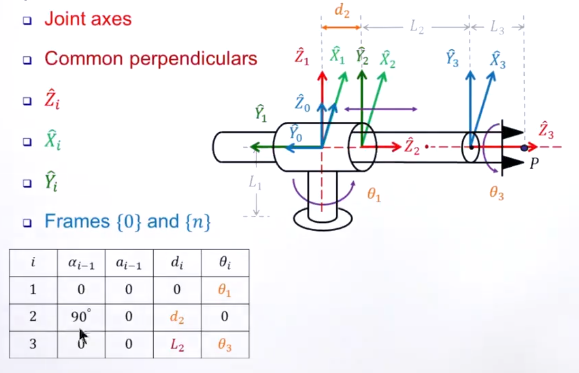
由于第一个轴和第二个轴之间有一个90度的转角,所以在i=2时是90.
d指的是垂直点到轴的距离,1和2之间有距离,并且这个距离是自变量,2和3之间有距离,是定值。
指的是现在转动的角度,2没有转动,所以是0。
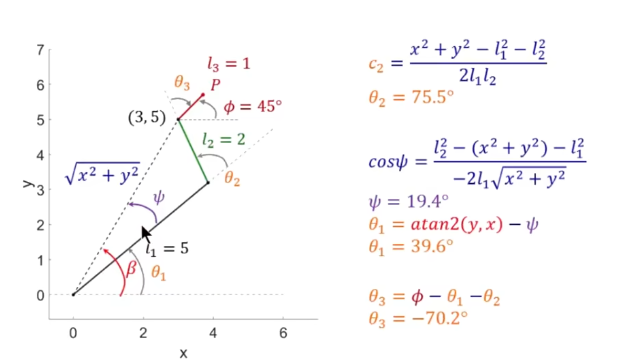
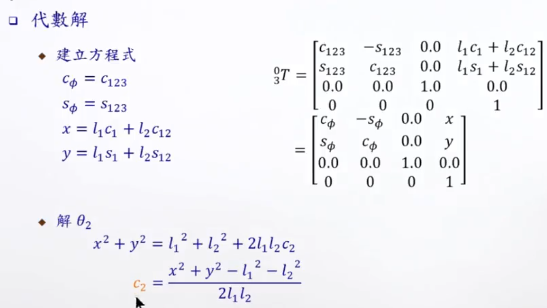
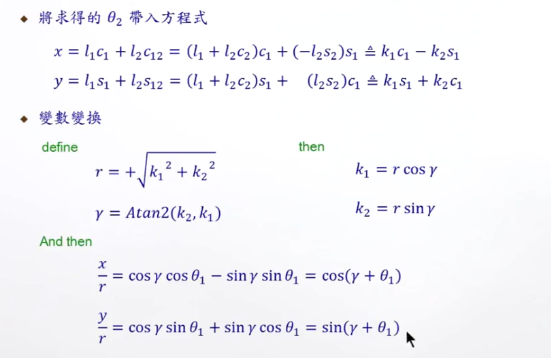
四.机械臂逆运动学
知道手指的位姿,返算每个关节的位姿。
用几何的方式计算解。
用代数的方式计算解

















 1658
1658

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









