






 文章详细介绍了四轮独立驱动汽车中MPC分层控制器的应用,涉及上层MPC的转矩分配和下层非线性优化技术,以及MATLAB和CarSim在模型开发和仿真中的作用。通过二次规划方法优化控制,提升车辆的操控性和稳定性。
文章详细介绍了四轮独立驱动汽车中MPC分层控制器的应用,涉及上层MPC的转矩分配和下层非线性优化技术,以及MATLAB和CarSim在模型开发和仿真中的作用。通过二次规划方法优化控制,提升车辆的操控性和稳定性。
四轮独立驱动汽车 MPC分层控制器 上层MPC dyc+afs 下层非线性优化
四轮独立驱动汽车(Four-wheel independent drive electric vehicle)转矩分配 DYC 与AFS控制CarSim与Simulink联合
MPC算法代码明晰可见,有利于算法学习
MPC问题转化为二次规划进行求解
下层规划提供多种方法:序列二次规划,有效集算法,内点法等
有详细说明
MATLAB版本为2018b CarSim版本为2018
ID:9189671468333881
让一部分人先把模型搞起来
四轮独立驱动汽车在现代汽车工业中占据着重要的地位,它拥有更高的操控性和驾驶体验。为了实现车辆的高效控制和稳定性,MPC分层控制器被广泛应用。在这篇文章中,我们将深入探讨四轮独立驱动汽车的MPC分层控制器以及其中的关键技术。
首先,我们需要了解四轮独立驱动汽车的基本原理。四轮独立驱动汽车是指每个车轮都由单独的电机驱动,从而实现了对每个车轮转矩的独立控制。这种设计使车辆具备更高的机动性和操控性,能够更好地适应不同路况和驾驶要求。
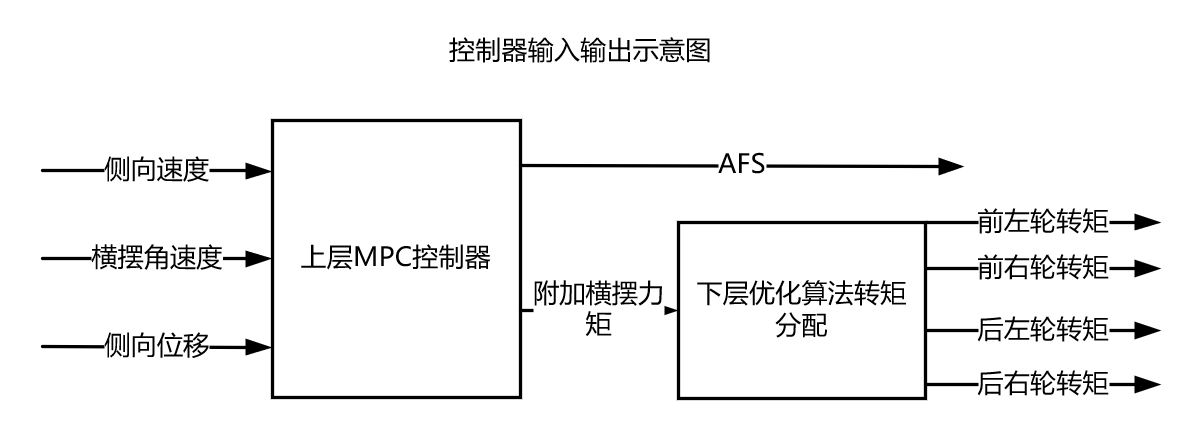
为了实现车辆的高效控制,MPC分层控制器被引入。MPC(Model Predictive Control)是一种优化控制方法,它基于车辆的数学模型和环境信息,通过优化算法实现对车辆控制输入的优化。MPC分层控制器将整个控制问题划分为上层MPC和下层非线性优化两部分,以实现更高效、更稳定的控制效果。
上层MPC主要负责车辆的整体轨迹规划和控制输入计算。在四轮独立驱动汽车中,上层MPC负责计算每个车轮的转矩分配。转矩分配的目标是使车辆在不同的驾驶情况下保持稳定,并提供良好的操控性能。利用MPC算法,可以将转矩分配问题转化为二次规划进行求解。通过对车辆的动力学特性和环境信息进行建模,并考虑到约束条件,优化算法可以在每个时刻计算出最优的转矩分配策略。这种方法的优势在于可以实时考虑到车辆的动态特性和外部环境的变化,从而实现更精确的控制。
下层非线性优化主要负责细化上层MPC的控制输入,并将其转化为实际的电机控制信号。在四轮独立驱动汽车中,下层非线性优化的目标是将上层MPC得到的转矩分配策略转化为电机的控制输入。在这个过程中,可以采用多种优化方法,如序列二次规划、有效集算法和内点法等。这些方法在考虑到电机特性和控制信号约束的情况下,可以优化电机控制信号的产生过程,使之更加精确和稳定。
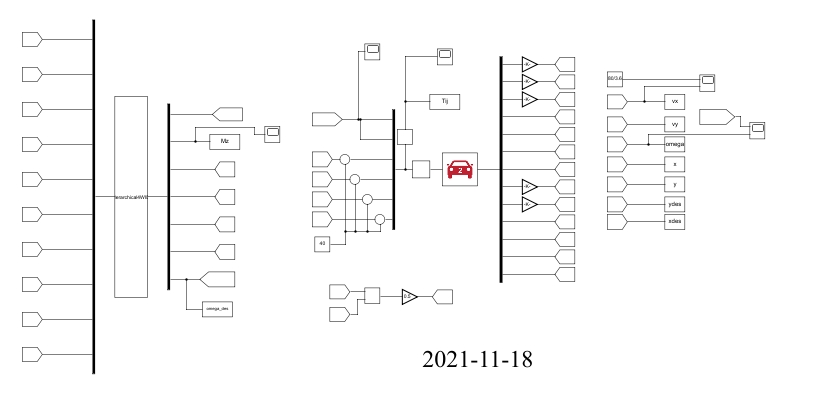
在实际的开发过程中,MATLAB和CarSim被广泛应用于四轮独立驱动汽车的建模和控制。MATLAB提供了强大的数学建模和优化算法工具,可以方便地进行MPC算法的开发和调试。同时,CarSim作为一款专业的汽车动力学仿真软件,可以提供真实的车辆行驶环境和动力学特性,为MPC算法的验证和调试提供有力的支持。
综上所述,四轮独立驱动汽车的MPC分层控制器是一种有效的控制方法,可以实现车辆在不同路况下的高效控制和稳定性。通过上层MPC的转矩分配和下层非线性优化的电机控制信号生成,四轮独立驱动汽车可以实现更精确和稳定的操控性能。MATLAB和CarSim作为开发和验证工具,为MPC算法的研究和应用提供了便利和支持。希望通过本文的介绍,读者对四轮独立驱动汽车的MPC分层控制器有更深入的了解,并在实际的开发中得到应用。
以上相关代码,程序地址:http://matup.cn/671468333881.html















 959
959











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









