






需求描述:编码实现向 turtlesim 发送请求,在乌龟显示节点的窗体指定位置生成一乌龟,这是一个
服务请求操作。
结果演示:

实现分析:
-
首先,需要启动乌龟显示节点。
-
要通过ROS命令,来获取乌龟生成服务的服务名称以及服务消息类型。
-
编写服务请求节点,生成新的乌龟。
实现流程:
-
通过ros命令获取服务与服务消息信息。
-
编码实现服务请求节点。
-
启动 roscore、turtlesim_node 、乌龟生成节点,生成新的乌龟。
1.服务名称与服务消息获取
获取话题:/spawn
rosservice list
获取消息类型:turtlesim/Spawn
rosservice type /spawn
或
rosservice info /spanw
获取消息格式:
rossrv info turtlesim/Spawn
float32 x
float32 y
float32 theta
string name
---
string name #返回乌龟的名字通过命令生成
rosservice call /spawn "x: 2.0
y: 2.0
theta: 0.0
name: 'turtle2'" 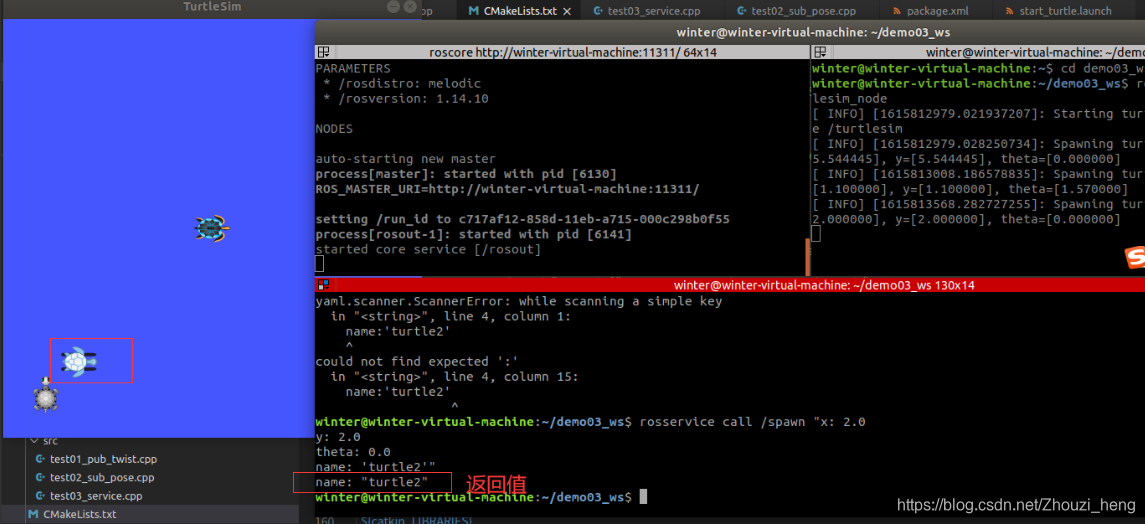
2.服务客户端实现
创建功能包需要依赖的功能包: roscpp rospy std_msgs turtlesim
实现方案A:C++
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
/*
需求:向服务端发送请求,生成一只小海龟
准备工作:
1 服务话题名称:/spaw
2 服务消息类型:turtlesim/Spawn
3 运行前先启动turtlesim_node节点
步骤:
1 包含头文件
2 初始化ros节点
3 创建节点句柄
4 创建service客户端
5 等待服务启动
6 发送请求
7 处理响应
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"client");
ros::NodeHandle nh;
//4 创建service客户端
ros::ServiceClient client = nh.serviceClient<turtlesim::Spawn>("/spawn");
//5 等待服务启动
//client.waitForExistence();
ros::service::waitForService("/spawn");
// 6 发送请求
turtlesim::Spawn spawn;
spawn.request.x = 1.1;
spawn.request.y = 1.1;
spawn.request.theta = 1.57;
spawn.request.name = "myTurtle";
bool flag = client.call(spawn);
// 7 处理响应
if (flag)
{
ROS_INFO("新的乌龟生成,名字:%s",spawn.response.name.c_str());
}
else {
ROS_INFO("乌龟生成失败!!!");
}
return 0;
}配置文件

编译运行
roscore
rosrun turtlesim turtlesim_node
source ./devel/setup.bash
rosrun plumbing_test test03_service
如何会生成失败???
再次执行会失败,小海龟名字唯一。

实现方案B:python
#! /usr/bin/env python
#coding=uft-8
"""
生成一只小乌龟
准备工作:
1.服务话题 /spawn
2.服务消息类型 turtlesim/Spawn
3.运行前先启动 turtlesim_node 节点
实现流程:
1.导包
需要包含 turtlesim 包下资源,注意在 package.xml 配置
2.初始化 ros 节点
3.创建 service 客户端
4.等待服务启动
5.发送请求
6.处理响应
"""
import rospy
from turtlesim.srv import Spawn,SpawnRequest,SpawnResponse
if __name__ == "__main__":
#初始化ros节点
rospy.init_node("set_turtle_p")
#创建客户端对象
client = rospy.ServiceProxy("/spawn", Spawn)
client.wait_for_service()
# 组织请求数据
request = SpawnRequest()
request.x = 2.0
request.y = 2.0
request.theta = -1.57
request.name = "my_turtle_p"
try:
response = client.call(request)
# 6.处理响应
rospy.loginfo("乌龟创建成功!,叫:%s",response.name)
except expression as identifier:
rospy.loginfo("服务调用失败")权限设置以及配置文件















 1530
1530











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









