









1. roscore
roscore是用来启动ros master,是运行ros系统前首先运行的命令
2. rosrun
rosrun是用来运行某个功能包内的某个节点的指令,有两个参数,第一个参数是功能包名,第二个参数是节点名
例:仿真小海龟
在一个终端中输入rosrun turtlesim turtlesim_node
在另一个终端中输入rosrun turtlesim turtle_teleop_key

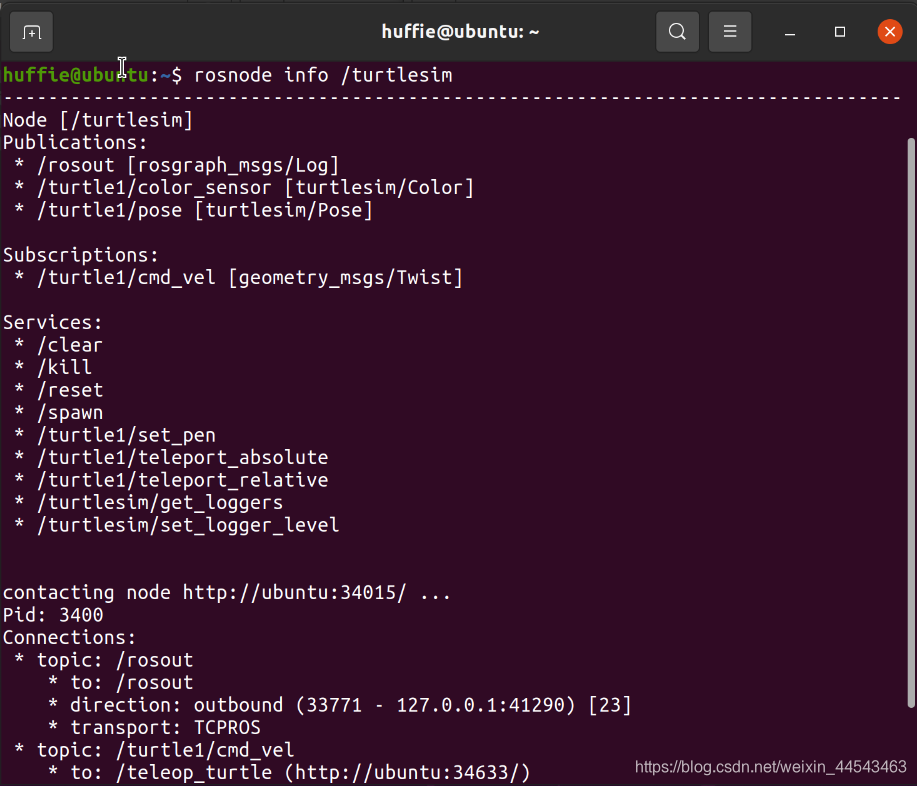
3. rosnode
rosnode,用来显示节点相关信息的指令
- rosnode list用来把系统中所有节点都列出来

- rosnode info *,查看节点的具体信息,如正在发布哪些话题、提供的服务、等其他信息
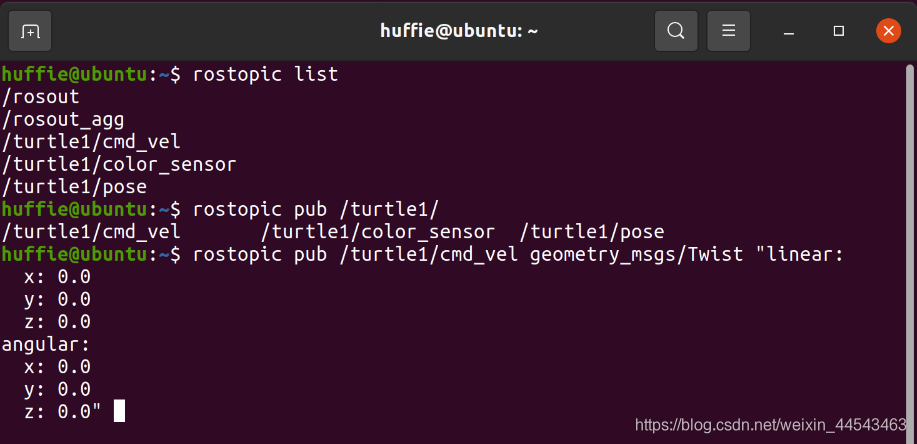
4. rostopic
- rostopic list,输出当前系统中所有话题的列表

- rostopic pub 【话题名+tab补全】,显示发布的内容
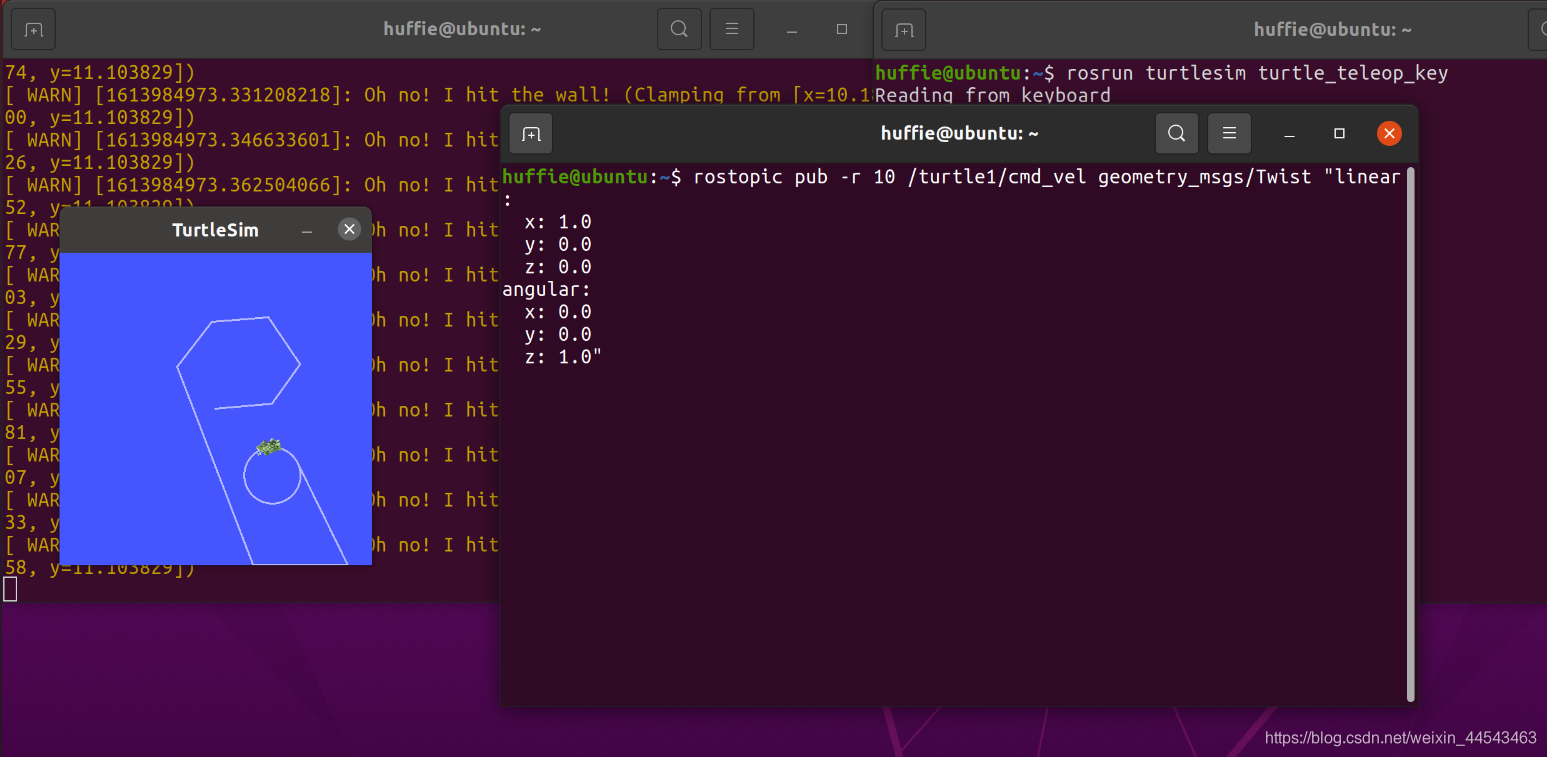
例:通过发布话题(rostopic pub)控制小海龟运动
输入代码:rostopic pub -r 10 /turtle1/cmd_vel+两次tab补全
通过修改linear速度和angular角度,可以控制小海龟的运动。其中 -r 10 是话题发布的频率,每秒发布十次。
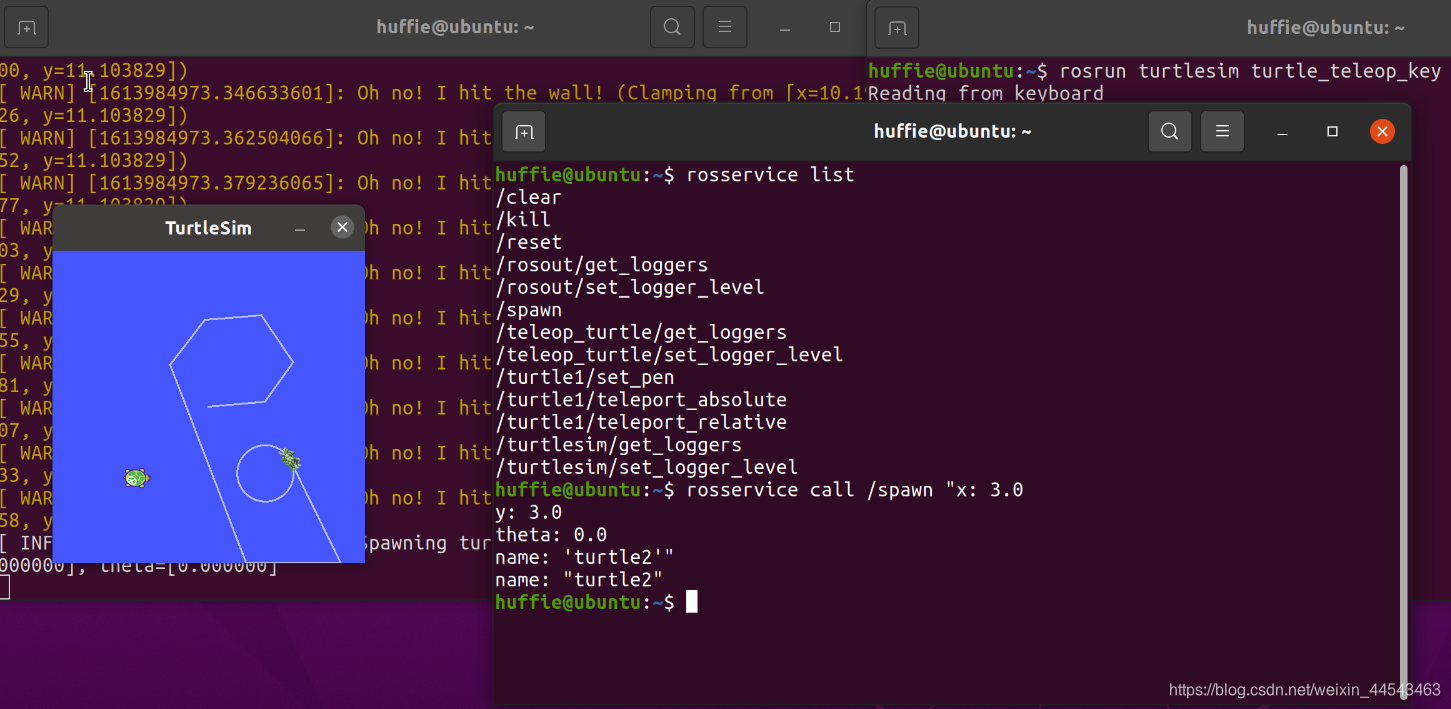
5. rosservice
- roservice list 可以显示ros系统内所有服务的列表(所有服务端都是上面的海龟仿真器)
- rosservice call 【服务名称+tab补全】发布请求
例:产生两只海龟(服务列表中/spawn是产生海龟的请求)
输入代码:rosservice call /spawn+两次tab补全
其中x,y是新海龟的坐标(仿真器左下角为原点)
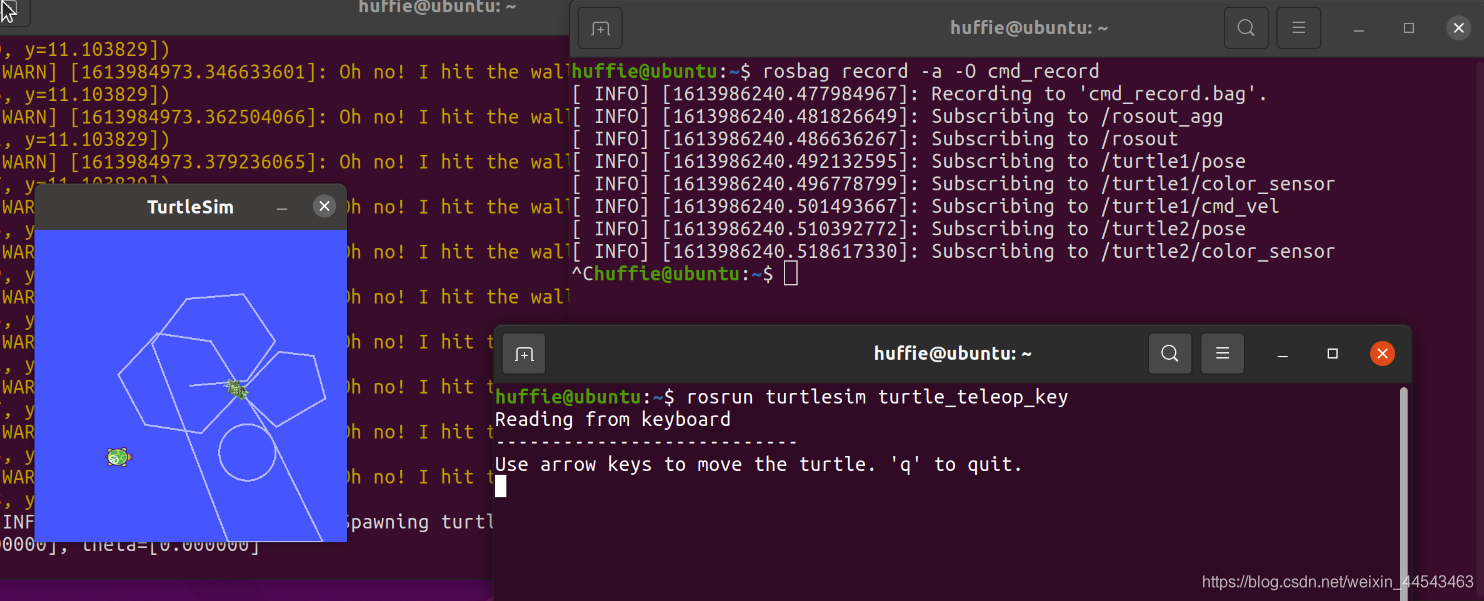
6. rosbag
记录当前系统内所有话题数据,并在下次复现出来。
例:保存小海龟的运动
- 输入命令:
rosbag record -a -O cmd_record
其中record指做记录,-a指记录所有数据,-o指将数据保存成压缩包,最后是保存文件的名字- 回到key终端,用键盘方向键控制小海龟进行运动
- 运动完成后使用
ctrl+C中断rosbag record
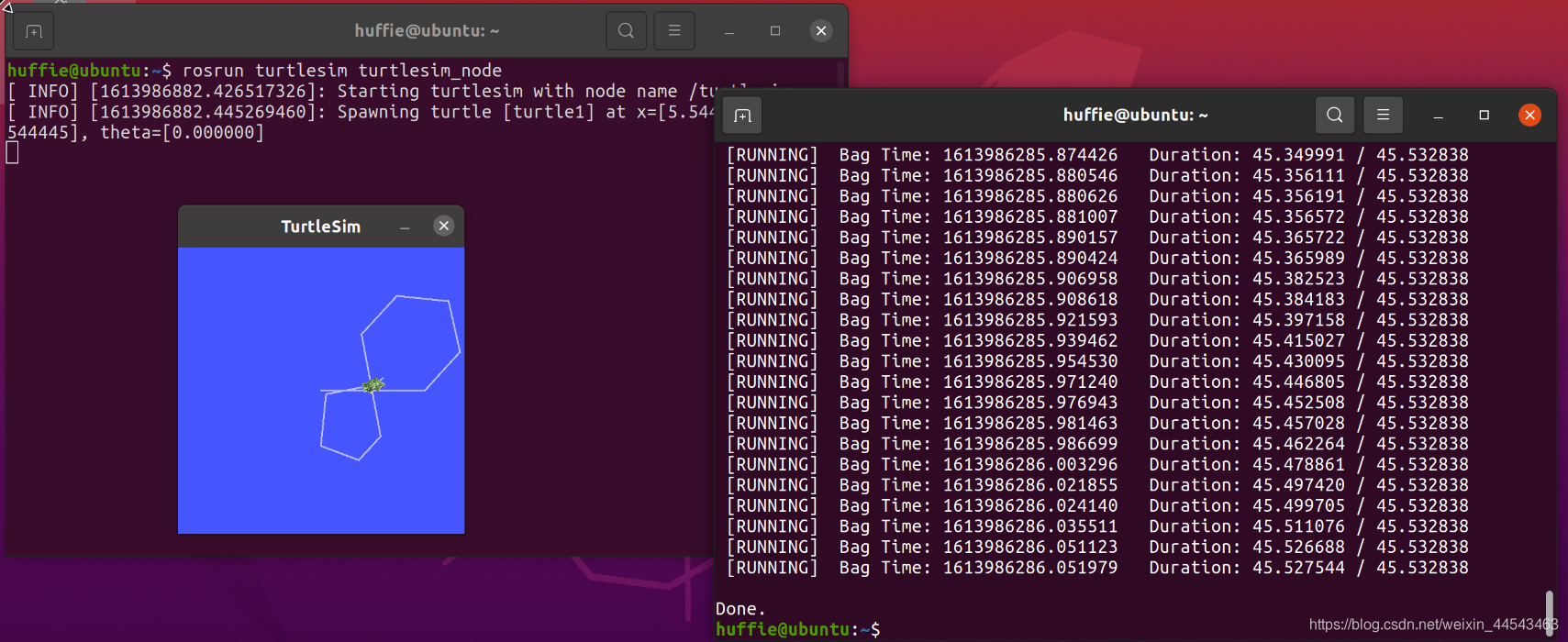
例:复现小海龟的运动
- 关掉之前打开的终端,重新打开一个终端,运行
roscore- 再新开一个终端,启动小海龟的仿真:
rosrun turtlesim turtlesim_node(这里不需要启动键盘输入)- 再新开一个终端,实现小海龟的动作复现:
rosbag play cmd_record.bag
本文学习内容来自古月居
官方论坛:https://www.guyuehome.com/
学习视频:https://www.bilibili.com/video/BV1zt411G7Vn


















 357
357

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











