







车载环境感知传感器比较
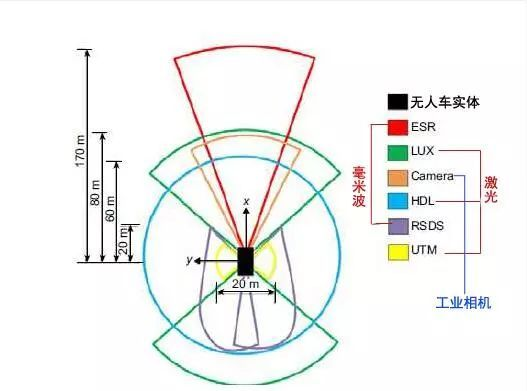
传感器的种类及分布
传感器种类及数量:3个激光雷达,两个毫米波雷达,工业相机(有单目也有双目的)
覆盖范围:车体360度全覆盖
探测距离:前方为100m,后方为80m),左右侧为20m。
考虑角度:为了保证安全性,每块区域需要两个或两个以上的传感器覆盖,以便相互校验
激光雷达
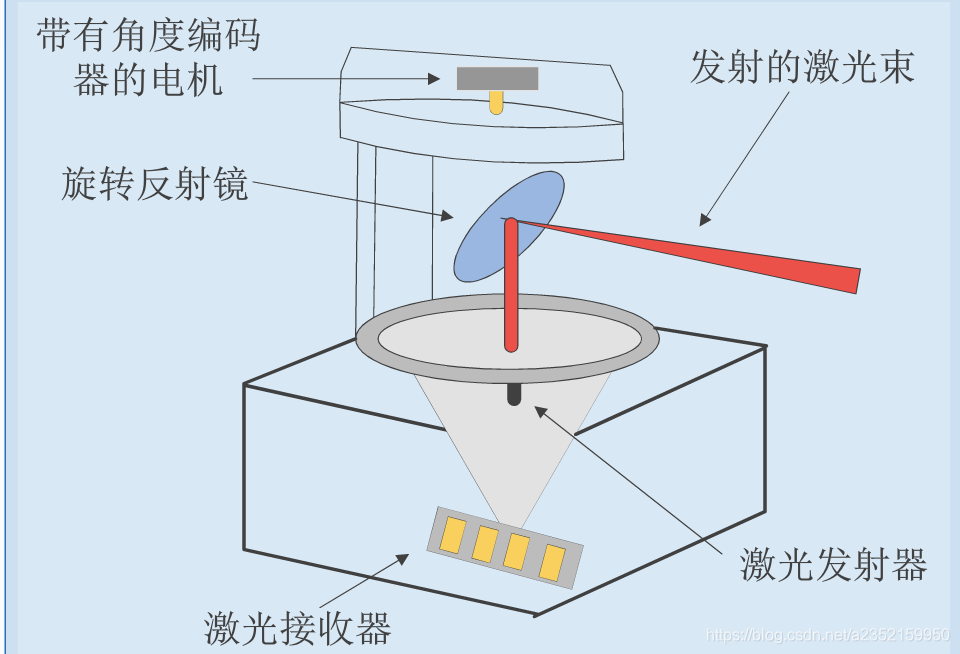
原理:
激光雷达向外界发射激光,激光碰到物体反射回来,通过时间差(激光的速度已知)便可以计算出物体的距离。通过获取扫描角可以得出物体的方位。
单线激光雷达
单线激光雷达就是只发射一束激光,如下图所示。红色的线就是单线激光雷达扫描的平面。从图中可以知道,个子高的成人可以轻易被激光扫描到,但是个子较矮的小孩不会被识别到。因此单线激光雷达只是扫描到一个平面
对于斜坡而言,激光雷达会将其视为障碍物,因此我们需要三维的多线激光雷达才能更好地感知环境。
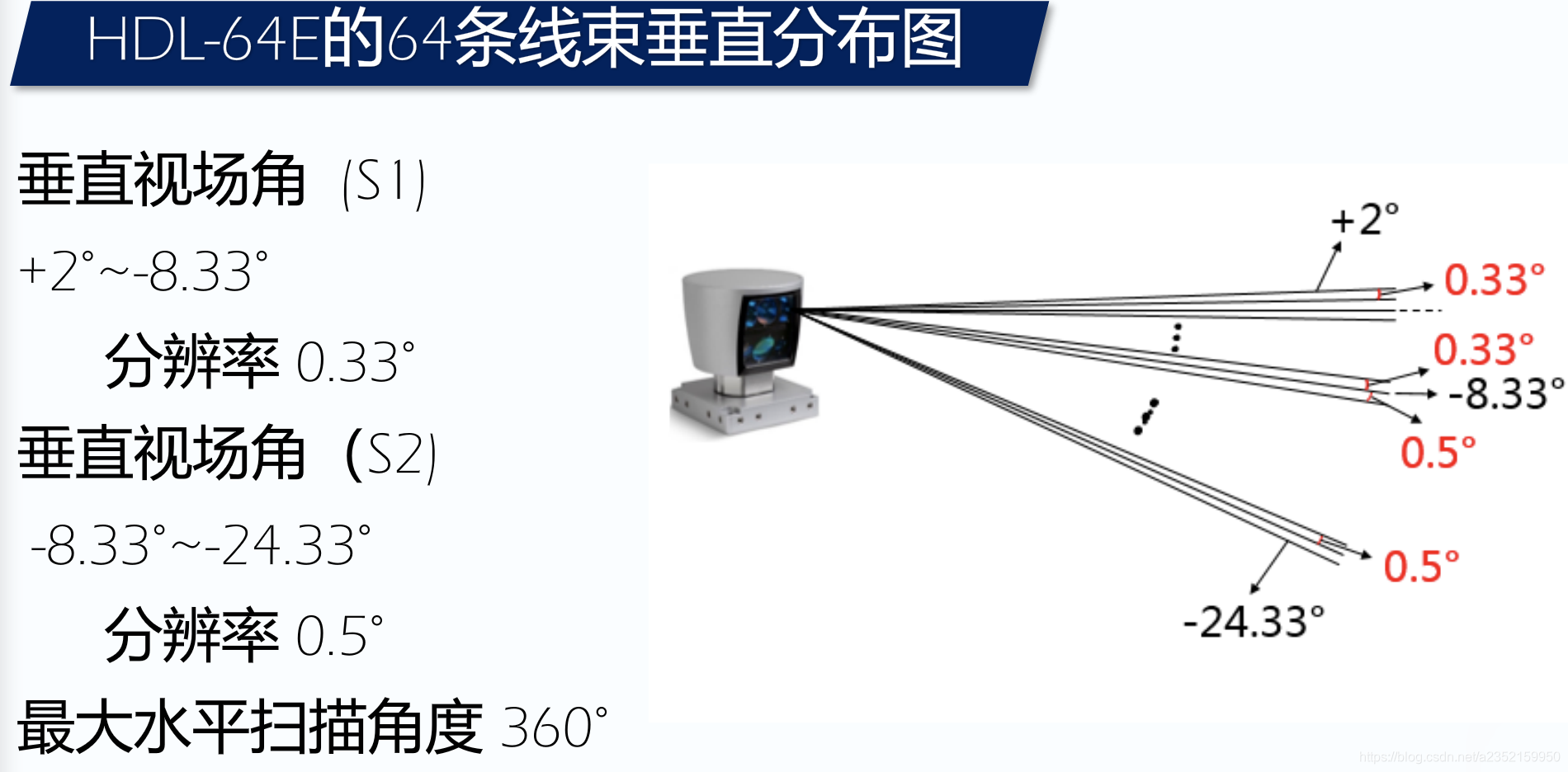
多线激光雷达
多线激光雷达就是发射多束不同俯仰角激光的雷达,如下图所示就是一个64线的激光雷达,可以在垂直方向发射64束激光,从而感知3D的环境
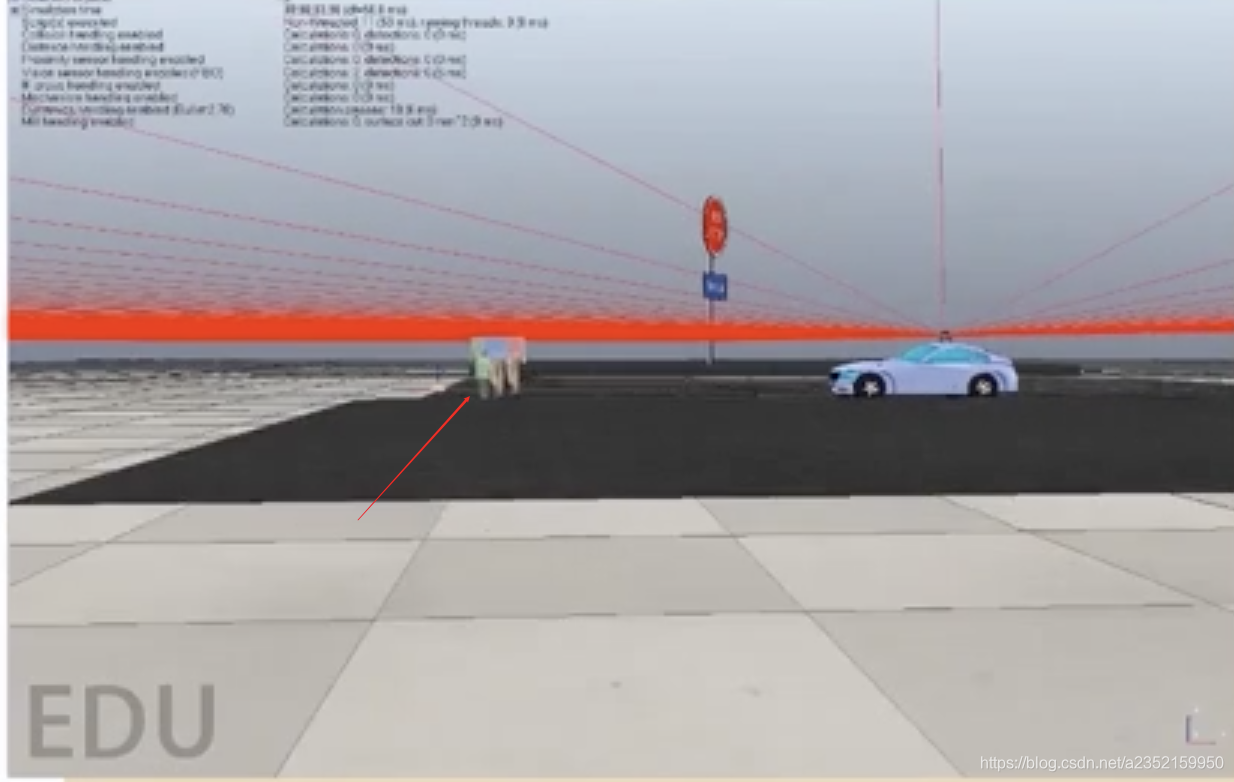
下面的图片使用VERP模拟了多线激光雷达的识别,我们看到,多线激光雷达可以识别出很多断面,每一个断面其实就是一束激光识别出的二维平面信息,然后通过一定的算法我们进行三维重建,得到激光点云。
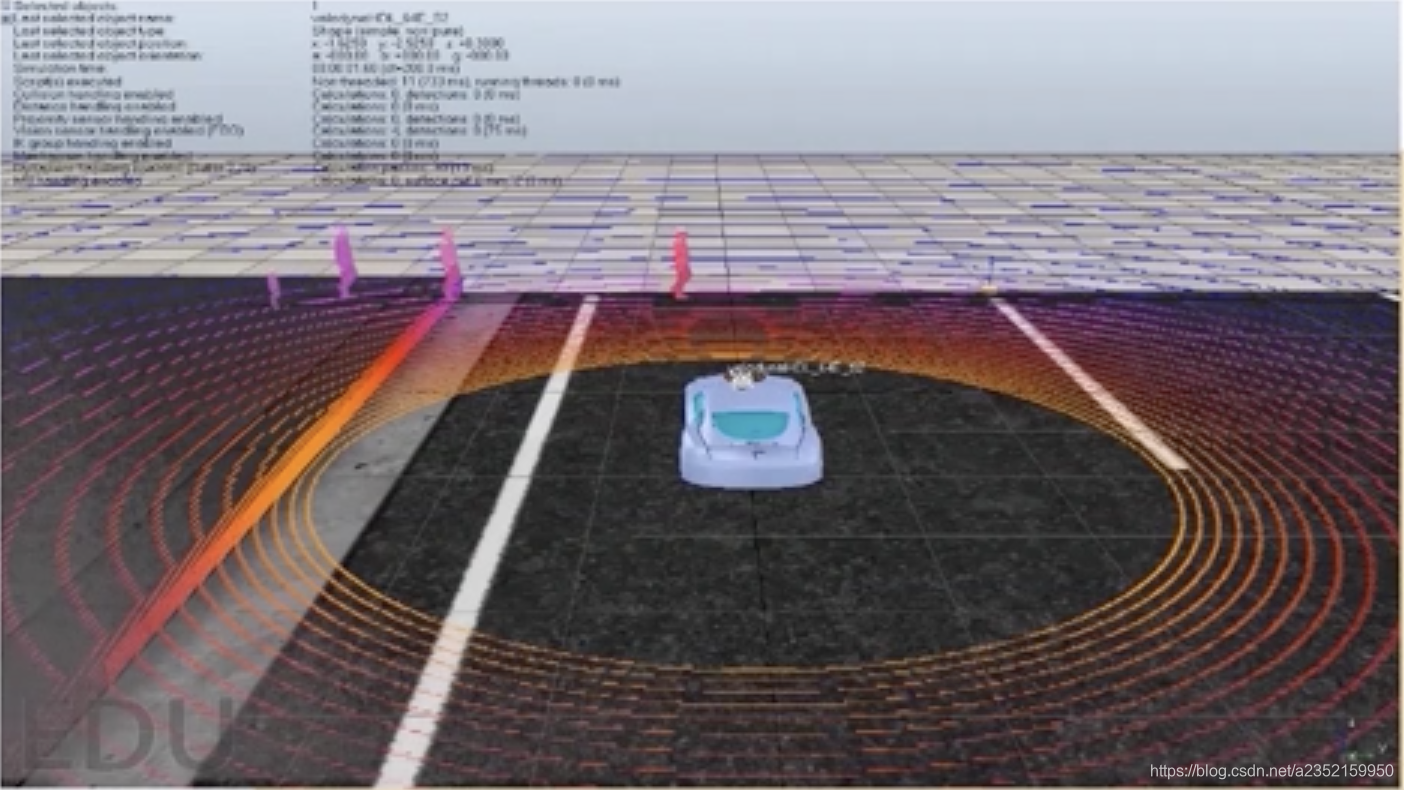
下面的图片则是真实场景中的感知,可以看到红色圈圈对应的是行人在真实场景多线激光雷达中的感知,蓝色圈圈则是汽车。

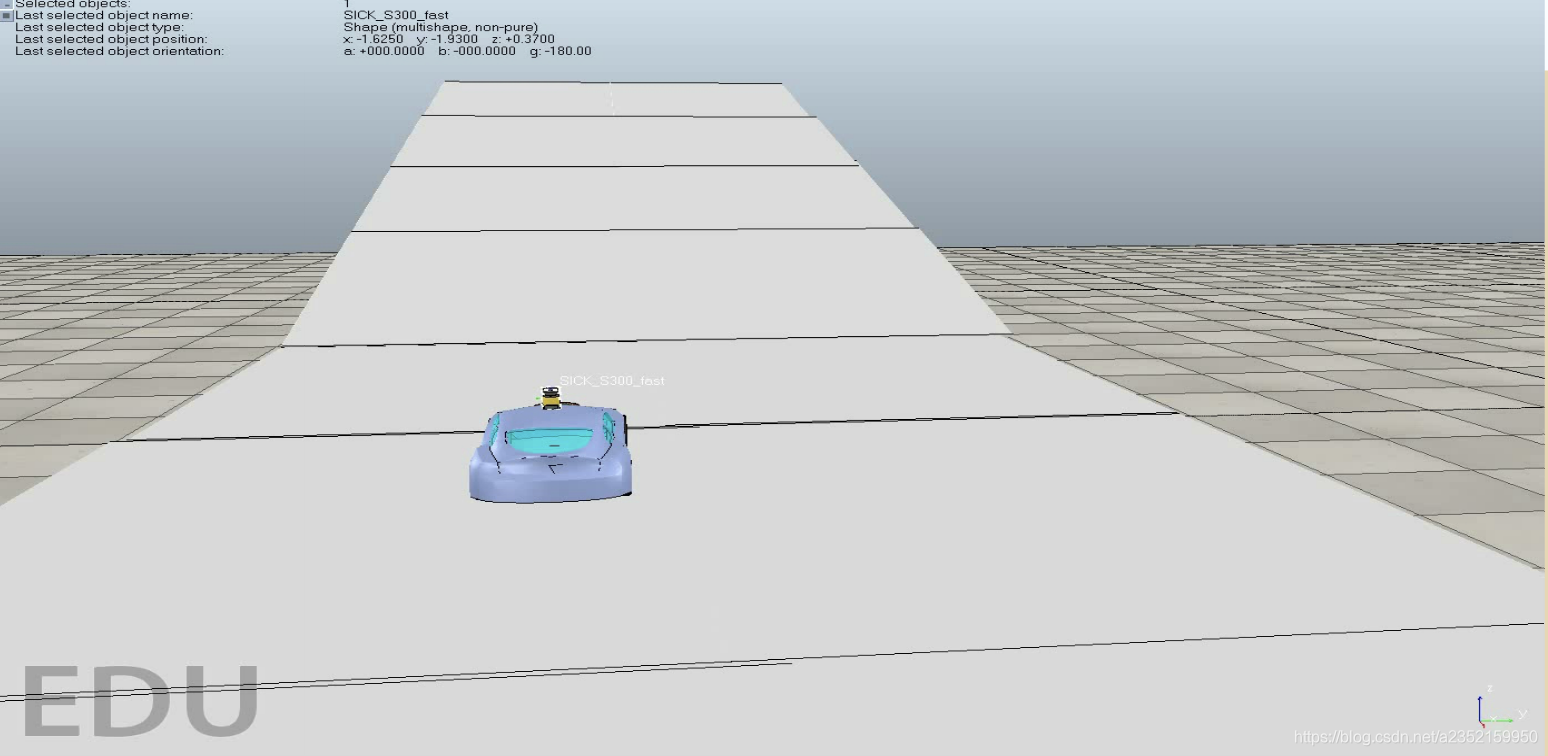
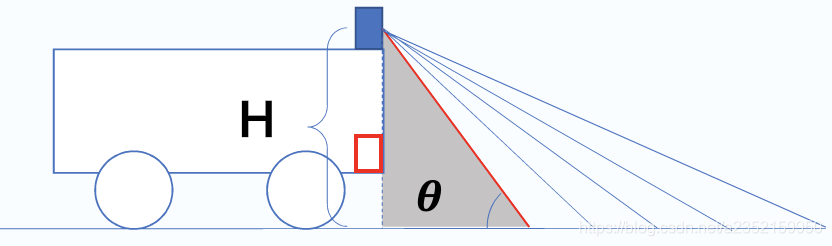
多线激光雷达盲区
第一个盲区就是阴影部分,我们激光束扫描不到的地方。可以通过在汽车下面安装一个毫米波雷达来解决这个缺点(红色方框)
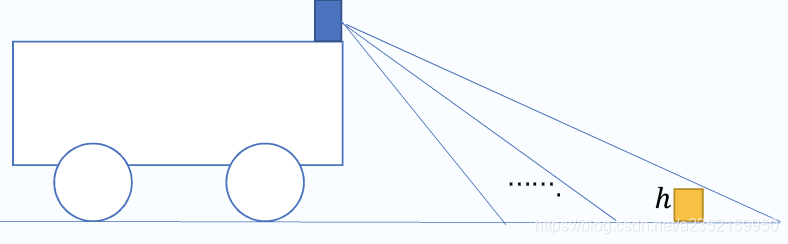
第二个盲区如下图所示,是由于激光束间具有一定的夹角引起的扫描盲区,这个盲区在动态的视频当中可以得到解决,因为车子的行走总会覆盖到这个物体。
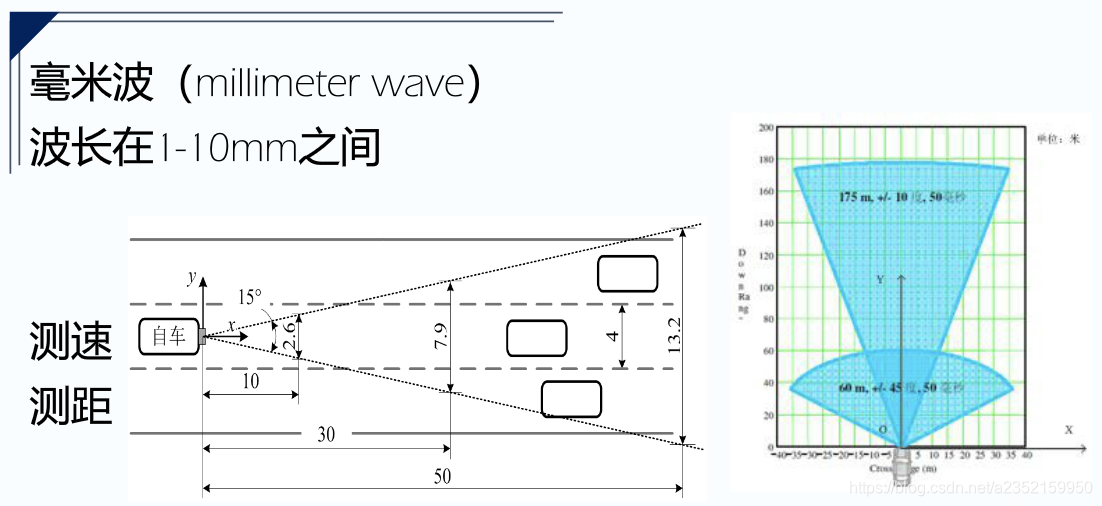
毫米波雷达
毫米波雷达发射的是波段在毫米级别的电磁波,测距和测向原理同激光雷达一样,但是毫米波雷达扫描的是一个锥形的区域。由于雨水、灰尘等直径都在毫米级别,所及毫米波雷达抗环境干扰能力更强。
相机
相机可以分为单目相机,双目相机和环视相机三种


几类传感器总结比较
超声波传感器,它的成本非常低,实施简单,可识别透明物体,缺点是检测距离近,三维轮廓识别精度不好,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,所以对桌腿等复杂轮廓的物体识别不好,但是它可以识别玻璃、镜面等物体。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









