









Blender自带python, 可以执行python脚本(选择Scripting将脚本输入到该窗口即可,如图)。
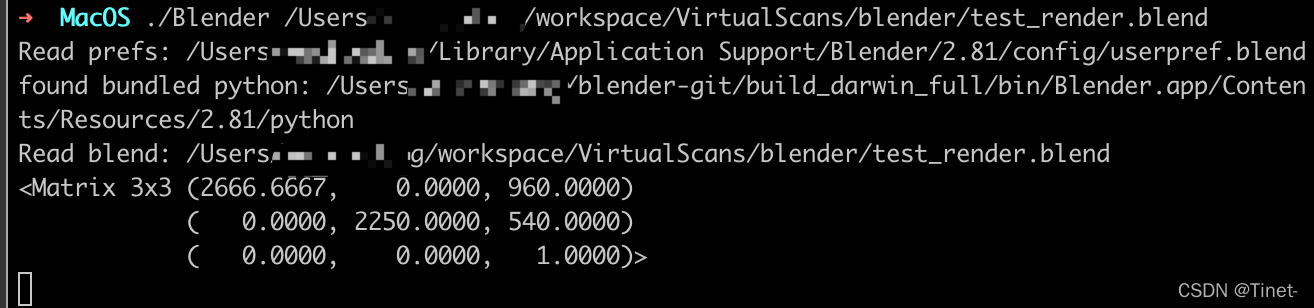
为了看到脚本中print命令的输出,可以在命令行里启动blender。如:
/Users/[username]/blender-git/build_darwin_full/bin/Blender.app/Contents/MacOS/Blender
或者
/Users/[username]/blender-git/build_darwin_full/bin/Blender.app/Contents/MacOS/Blender test_render.blend
这时候再在Scripting脚本里面运行如下程序的时候即可在命令行内看到输出:
import bpy
from mathutils import Matrix
# https://blender.stackexchange.com/questions/15102/what-is-blenders-camera-projection-matrix-model/38189#38189
def get_calibration_matrix_K_from_blender(camd):
f_in_mm = camd.lens
scene = bpy.context.scene
resolution_x_in_px = scene.render.resolution_x
resolution_y_in_px = scene.render.resolution_y
scale = scene.render.resolution_percentage / 100
sensor_width_in_mm = camd.sensor_width
sensor_height_in_mm = camd.sensor_height
pixel_aspect_ratio = scene.render.pixel_aspect_x / scene.render.pixel_aspect_y
if (camd.sensor_fit == 'VERTICAL'):
# the sensor height is fixed (sensor fit is horizontal),
# the sensor width is effectively changed with the pixel aspect ratio
s_u = resolution_x_in_px * scale / sensor_width_in_mm / pixel_aspect_ratio
s_v = resolution_y_in_px * scale / sensor_height_in_mm
else: # 'HORIZONTAL' and 'AUTO'
# the sensor width is fixed (sensor fit is horizontal),
# the sensor height is effectively changed with the pixel aspect ratio
pixel_aspect_ratio = scene.render.pixel_aspect_x / scene.render.pixel_aspect_y
s_u = resolution_x_in_px * scale / sensor_width_in_mm
s_v = resolution_y_in_px * scale * pixel_aspect_ratio / sensor_height_in_mm
# Parameters of intrinsic calibration matrix K
alpha_u = f_in_mm * s_u
alpha_v = f_in_mm * s_v
u_0 = resolution_x_in_px*scale / 2
v_0 = resolution_y_in_px*scale / 2
skew = 0 # only use rectangular pixels
K = Matrix(
((alpha_u, skew, u_0),
( 0 , alpha_v, v_0),
( 0 , 0, 1 )))
return K
if __name__ == "__main__":
# Insert your camera name below
K = get_calibration_matrix_K_from_blender(bpy.data.objects['Camera'].data)
print(K)


















 3244
3244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











