







安装vm-tools遇到的问题(没想到在这卡了我一下午)
vmtool安装
一、机械臂的环境搭建
首先按照这个教程安装机械臂仿真(有区别的是我在ubuntu20.04环境和noetic平台下装得)
aubo机械臂模型包下载和测试
遇到的各种问题和解决方案(上述博客讲了很多,但是我依然遇到了一些问题陈列如下)
1、fatal error :Eigen/Core: No such file or directory
Eigen
2、Undefined reference to google protobuf
protobuf
二、机械臂模型文件修改
1、为link添加惯性参数、碰撞属性(这两个属性模型已经有了故省略)
2、为joint添加传动装置
以aubo_i5为例在aubo_i5.urdf.xacro模型文件中添加如下代码
<!-- Transmissions for ROS Control -->
<xacro:macro name="transmission_block" params="joint_name">
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:transmission_block joint_name="shoulder_joint"/>
<xacro:transmission_block joint_name="upperArm_joint"/>
<xacro:transmission_block joint_name="foreArm_joint"/>
<xacro:transmission_block joint_name="wrist1_joint"/>
<xacro:transmission_block joint_name="wrist2_joint"/>
<xacro:transmission_block joint_name="wrist3_joint"/>
2、添加gazebo 控制器插件
以aubo_i5为例在aubo_i5.urdf.xacro模型文件中添加如下代码
<!-- <xacro:aubo_arm_transmission prefix="" /> -->
<!-- ros_control plugin -->
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/aubo_i5</robotNamespace>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
3、放开joint速度和力度参数
以aubo_i5为例在aubo_i5.urdf.xacro模型文件中修改如下代码
<limit lower="-3.04" upper="3.04" effort="0" velocity="0" />(修改前)
<limit lower="-3.04" upper="3.04" effort="50" velocity="50" />(修改后)
4、提前下载模型文件库并放置于 ~/.gazebo/models目录下(之后下载会很慢)
gazebo模型
机械臂配置以及moveit!
可以按照下方教程直接创建moveit,但有时候不稳定因此大部分文件自己配置
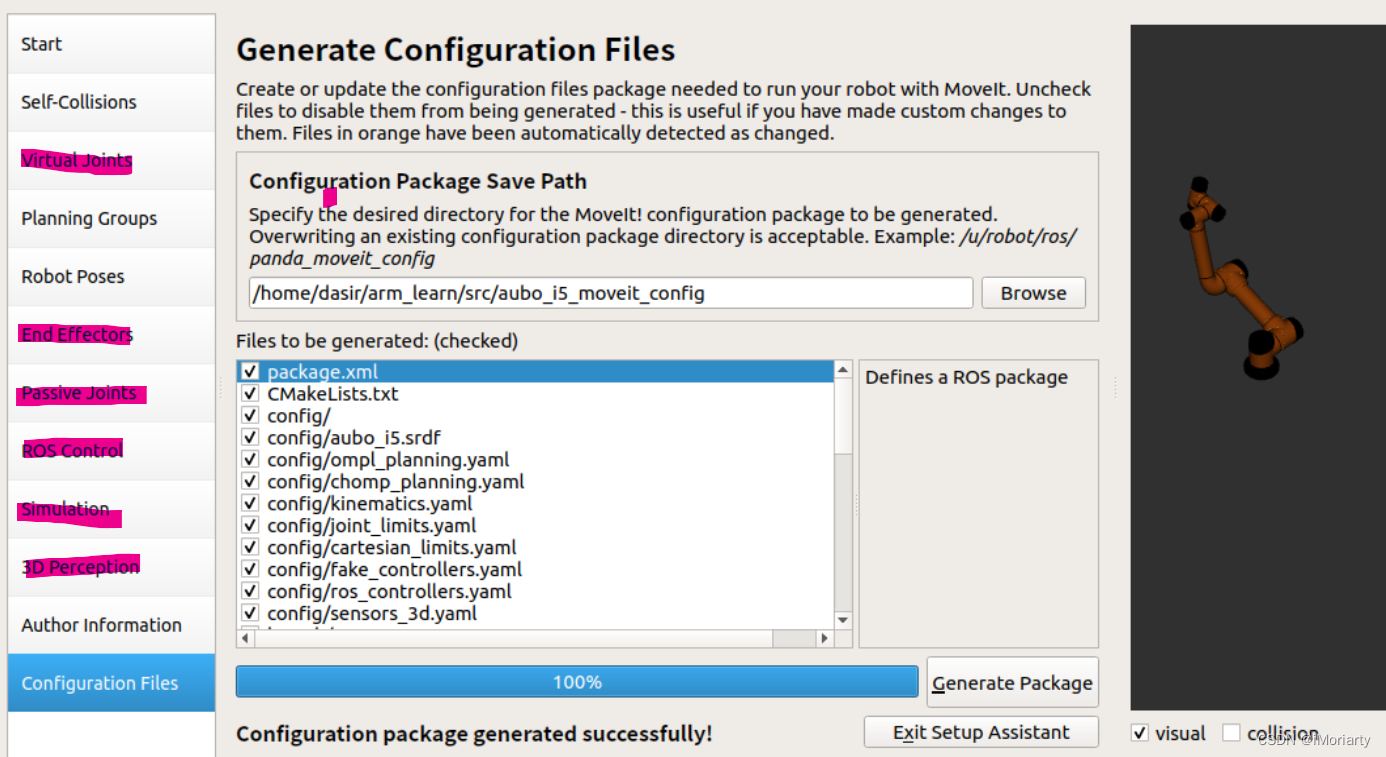
moveit-assistant自动配置
1、参照上方链接,使用moveit-assistant,标红的模块不管
2、创建功能能包gazebo,在功能包下添加文件夹luanch和config
3、config文件夹下添加配置文件
aubo_i5_gazebo_joint_states.yaml
aubo_i5:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
aubo_i5_trajectory_control.yaml
aubo_i5:
arm_joint_controller:
type: "position_controllers/JointTrajectoryController"
joints:
- shoulder_joint
- upperArm_joint
- foreArm_joint
- wrist1_joint
- wrist2_joint
- wrist3_joint
gains:
shoulder_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
upperArm_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
foreArm_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
wrist1_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
wrist2_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
wrist3_joint: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}
4、launch文件夹下添加aubo_i5文件夹,添加launch文件
aubo_i5_gazebo_states.launch
<launch>
<!-- 将关节控制器的配置参数加载到参数服务器中 -->
<rosparam file="$(find aubo_gazebo)/config/aubo_i5_gazebo_joint_states.yaml" command="load"/>
<node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/aubo_i5" args="joint_state_controller" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"
respawn="false" output="screen">
<remap from="/joint_states" to="/aubo_i5/joint_states" />
</node>
</launch>
aubo_i5_gazebo_world.launch
<launch>
<!-- these are the arguments you can pass this launch file, for example paused:=true -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- We resume the logic in empty_world.launch -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- Load the URDF into the ROS Parameter Server -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find aubo_description)/urdf/aubo_i5.urdf.xacro'" />
<!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model aubo_i5 -param robot_description"/>
</launch>
aubo_i5_trajectory_controller.launch
<launch>
<rosparam file="$(find aubo_gazebo)/config/aubo_i5_trajectory_control.yaml" command="load"/>
<node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/aubo_i5" args="arm_joint_controller"/>
</launch>
aubo_i5_bringup_moveit.launch
<launch>
<!-- Launch Gazebo -->
<include file="$(find aubo_gazebo)/launch/aubo_i5/aubo_i5_gazebo_world.launch" />
<!-- ros_control arm launch file -->
<include file="$(find aubo_gazebo)/launch/aubo_i5/aubo_i5_gazebo_states.launch" />
<!-- ros_control trajectory control dof arm launch file -->
<include file="$(find aubo_gazebo)/launch/aubo_i5/aubo_i5_trajectory_controller.launch" />
<!-- moveit launch file -->
<include file="$(find aubo_i5_moveit_config)/launch/moveit_planning_execution.launch" />
</launch>
5、/src/aubo_i5_moveit_config/config文件夹下添加
controllers_gazebo.yaml
controller_manager_ns: controller_manager
controller_list:
- name: aubo_i5/arm_joint_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- shoulder_joint
- upperArm_joint
- foreArm_joint
- wrist1_joint
- wrist2_joint
- wrist3_joint
6、/src/aubo_i5_moveit_config/launch文件夹下
添加moveit_planning_execution.launch
<launch>
# The planning and execution components of MoveIt! configured to
# publish the current configuration of the robot (simulated or real)
# and the current state of the world as seen by the planner
<include file="$(find aubo_i5_moveit_config)/launch/move_group.launch">
<arg name="publish_monitored_planning_scene" value="true" />
</include>
# The visualization component of MoveIt!
<include file="$(find aubo_i5_moveit_config)/launch/moveit_rviz.launch">
<arg name="rviz_config" value="true" />
</include>
<!-- We do not have a robot connected, so publish fake joint states -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/aubo_i5/joint_states]</rosparam>
</node>
</launch>
aubo_i5_moveit_controller_manager.launch.xml下添加gazebo控制
<!-- gazebo Controller -->
<rosparam file="$(find aubo_i5_moveit_config)/config/controllers_gazebo.yaml"/>
moveit_rviz.launch文件修改如下
<launch>
<arg name="debug" default="false" />
<arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix" value="gdb --ex run --args" />
<arg name="rviz_config" default="false" />
<arg unless="$(arg rviz_config)" name="command_args" default="" />
<arg if="$(arg rviz_config)" name="command_args" default="-d $(find aubo_i5_moveit_config)/launch/moveit.rviz" />
<node name="$(anon rviz)" launch-prefix="$(arg launch_prefix)" pkg="rviz" type="rviz" respawn="false"
args="$(arg command_args)" output="screen">
<rosparam command="load" file="$(find aubo_i5_moveit_config)/config/kinematics.yaml"/>
</node>
</launch>
7、启动
source devel/setup.bash
roslaunch aubo_gazebo aubo_i5_bringup_moveit.launch
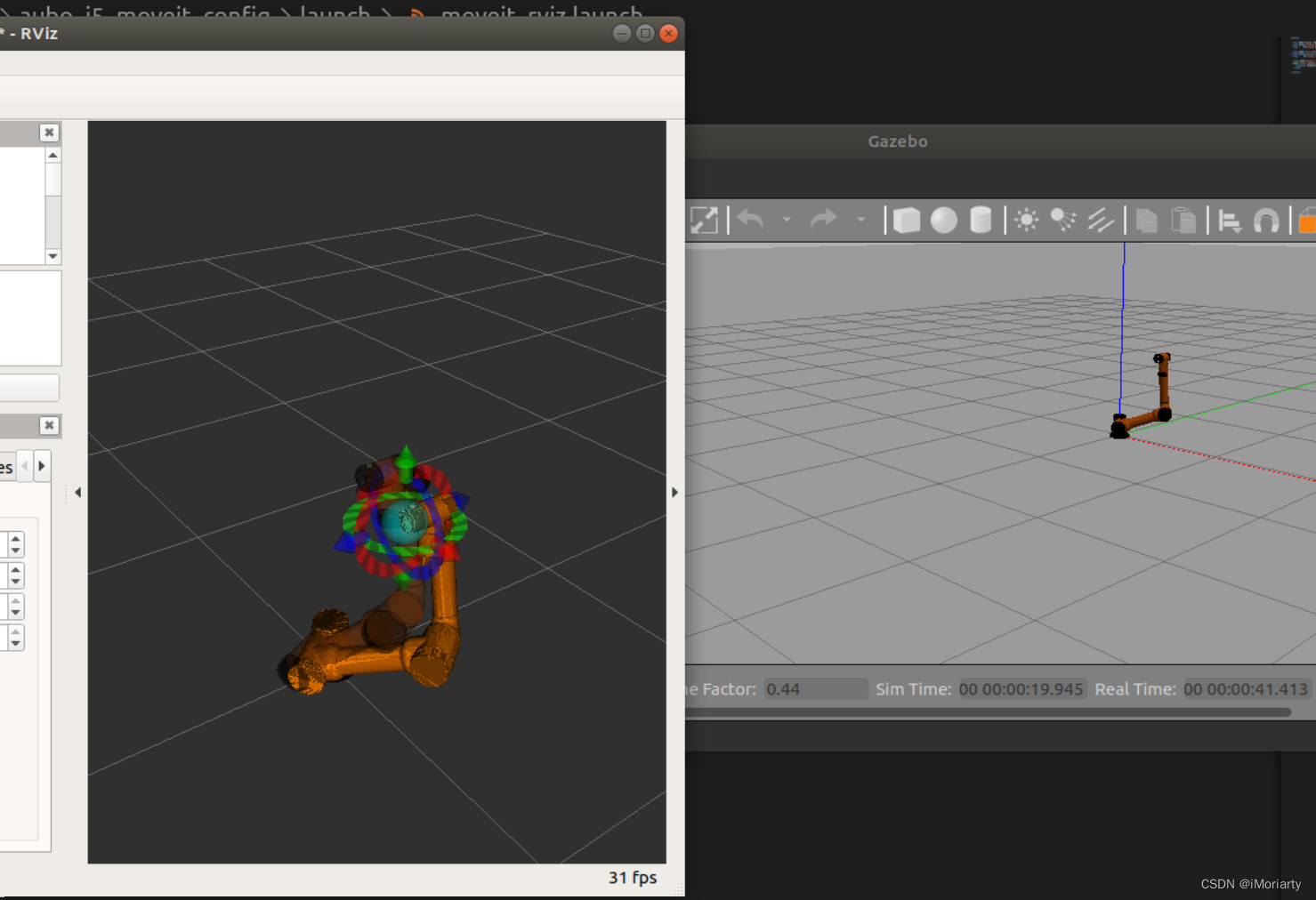 如果gazebo闪退可以试着执行下面这个代码
如果gazebo闪退可以试着执行下面这个代码
export SVGA_VGPU10=0
更改SVGA_VGPU10变量时,其实只是在告诉系统OpenGL版本,尝试两种选择,然后看看哪个更适合
还有就算要注意依赖包要装全,不然也会报错比如
sudo apt install ros-melodic-ros-controllers















 7968
7968











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









