







首要参考Matlab官方提供的方法:
https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
在Matlab2021a中,已经提供了外参标定APP:Lidar Camera Calibrator
-
import data时注意,图像与点云应一一对应,如下图所示:


每一对点云和图像必须保证是同一时刻的。 -
标定结果为tform变量,其中包含Rotation和Tranlation
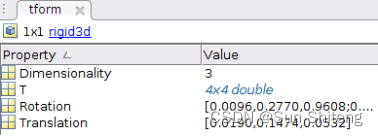
此tform的意义是将点云系中的点转换到相机坐标系中的旋转和平移,即Y=RX+T,其中X为点云系中坐标,Y为相机系中坐标。 -
在ROS中使用该外参时应注意:
ROS中使用的四元数实部在最后即:q.x, q.y, q.z, q.w;
MATLAB中则是:q.w, q.x, q.y, q.z;
故需要将MATLAB中的第一个移到最后
static_transform_publisher x y z qx qy qz qw parent_frame child_frame period_in_ms















 3630
3630











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









