






自动驾驶视觉中的坐标系变换
假设我们都阅读了高翔博士的《视觉SLAM14讲》,其中对于针孔模型那块当初留了一个小疑问,就是明明投影是在镜头的另外一侧,然后就能被强制拉回到和物体,为什么就可以那样呢?
附赠自动驾驶最全的学习资料和量产经验:链接
1.成像的原理**[1]**:
示意图展示了成像的原理:

成像的原理
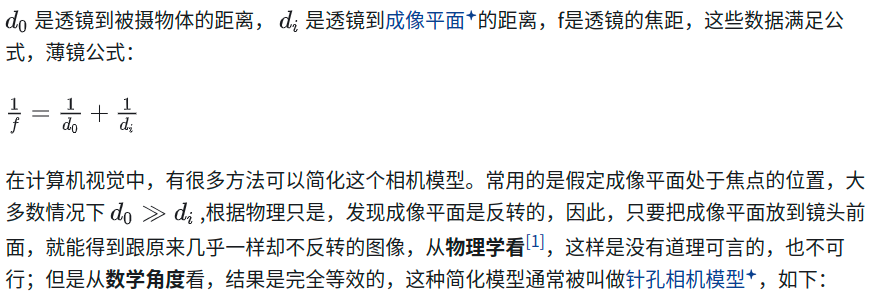
评注:


2 相机相关的坐标系**[3]**:
2.1 欧氏坐标系
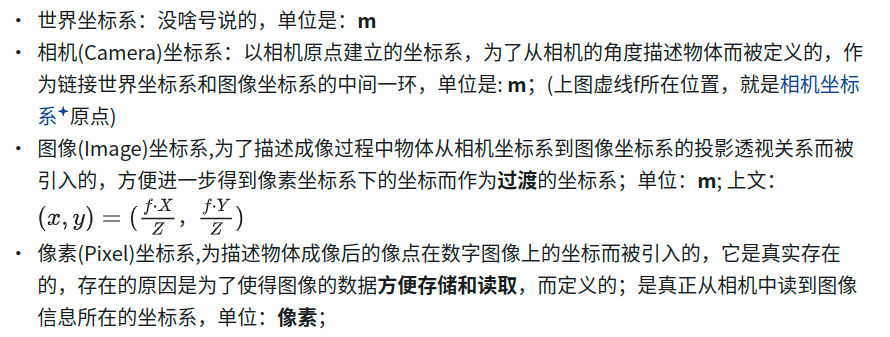
评注:
相机坐标系,常常需要和lidar坐标系,车体坐标系进行一个外参的坐标系对齐;
这里面真正比较难和常用的是图像坐标系到像素坐标系进行的坐标变换;
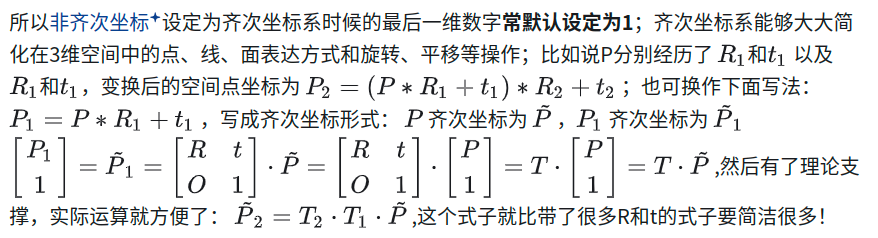
2.2 齐次(射影)坐标系
评注:下面是戴建生老师的书,一向非常的严谨和紧凑还有准确!
"齐次性"是指坐标系数独立于空间位置[4],1827年德国数学家August创立的,从此射影几何学进入到现代数学之列,一般用欧氏空间中的z=1处的平面阐明射影几何的基本思想,齐次坐标系也叫做射影坐标系,是一组类似于欧氏空间笛卡尔坐标系的射影空间坐标,可用有限值表示包括无穷远点在内的所有点;是不是很酷!

评注:下面主要是程小六书中的内容,内容没有那么严谨但是容易理解;
齐次坐标系单独拿出来说,是因为它和其他几个坐标系完全不同,它是在原来的坐标的基础上加上1个维度;如果一个点在齐次坐标系中,最后一个元素为0则表示该点为无穷远点[5]。

3. 像素的产生过程**[1]**
三维空间点(X,Y,Z)与它在图像上对应点(x,y)之间的关系,后者是用像素坐标表示的;当一个3维点投影[3]到图像平面上2维的任何坐标[6]时是一个降维的过程,而且是不可逆的过程;关于不可逆的解释[7],只有方阵才有行列式[8]
踩扁了的易拉罐如何还原?!

只有S行列式不为0的方阵才存在逆矩阵,

当行列式值为0,变换矩阵不可逆,如下图造成的形态变换也是不可逆的[9],

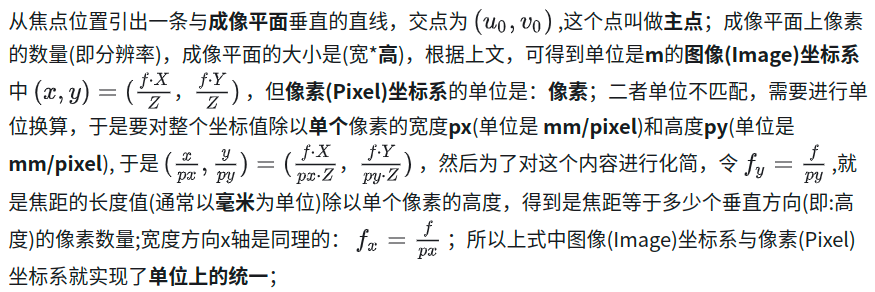
3.1 图像(Image)坐标系单位统一到像素(Pixel)坐标系的像素

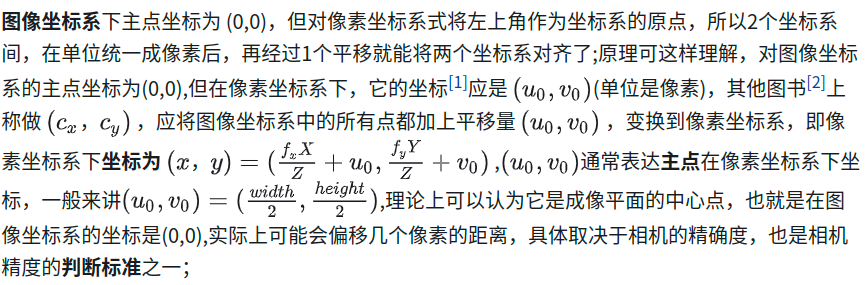
3.2 图像坐标系原点与像素(Pixel)坐标系原点对齐**[1]**
3.3 最小化重投影误差
函数cv::calibrateCamera 在得到标定结果之前进行了优化,以便找到合适的内参和外参,使根据三维点的投影计算得到的点和实际位置(图像中的位置)之间的距离达到最小,他们的累加和就是重投影误差,如果很多个点组合在一起求最小,就叫做最小化重投影误差;


4. RGB相机信息(DabaiDCW2)
4.1 RGB内参与成像的关系

4.2 RGB基本信息和标定卡控

4.3 RGB内参标定的分布规律

------------------------写给未来
1. 第1节成像的原理中关于齐次坐标系的内容,可以补上;
2.扩展资料,背景照片来自:
CS231A: Computer Vision, From 3D Perception to 3D Reconstruction and beyond
下面链接是上面链接的下一个目录:















 2057
2057

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









