




 本文详细介绍了控制系统的设计与校正问题,包括性能指标、系统带宽选择、校正方法和基本控制规律。重点讲解了比例(P)、比例-微分(PD)、积分(I)、比例-积分(PI)和比例-积分-微分(PID)控制规律。此外,还阐述了无源超前、滞后和滞后-超前校正网络的特性,以及串联校正中的超前、滞后校正的应用与区别。
本文详细介绍了控制系统的设计与校正问题,包括性能指标、系统带宽选择、校正方法和基本控制规律。重点讲解了比例(P)、比例-微分(PD)、积分(I)、比例-积分(PI)和比例-积分-微分(PID)控制规律。此外,还阐述了无源超前、滞后和滞后-超前校正网络的特性,以及串联校正中的超前、滞后校正的应用与区别。
主要内容是书上6-1、6-2、6-3
目录
一、系统的设计与校正问题
1. 控制系统的性能指标
时域性能指标:峰值时间、调节时间、超调量、阻尼比、稳态误差等。
频域性能指标:相角裕度、幅值裕度、谐振频率、谐振峰值、截止频率、闭环带宽等。
工程技术界多采用频率法校正。
2. 系统带宽的选择
带宽频率是一项重要指标。
带宽大小要求既能以所需精度跟踪输入信号,又能拟制噪声扰动信号。
在控制系统实际运行中,输入信号一般是低频信号,而噪声信号是高频信号。
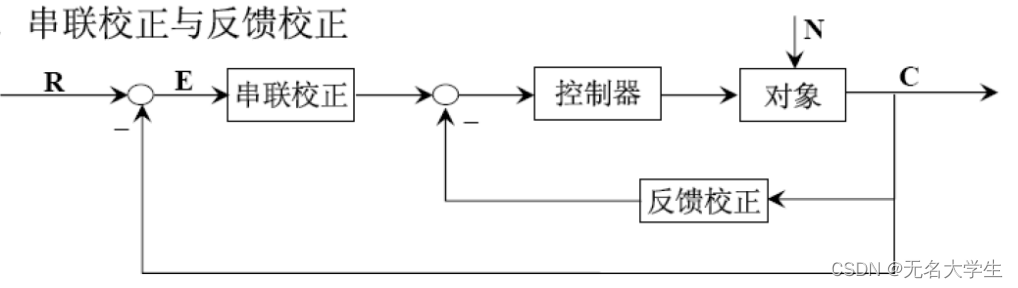
3. 校正方法
串联校正和反馈校正是控制系统中最为常用的两种校正方式。也可同时采用。
串联校正的优点是:设计简单,方便,应用非常广泛。
反馈校正的优点是:往往用元件较少,更为突出的是,可以抑制环内参数变化对系统的影响。
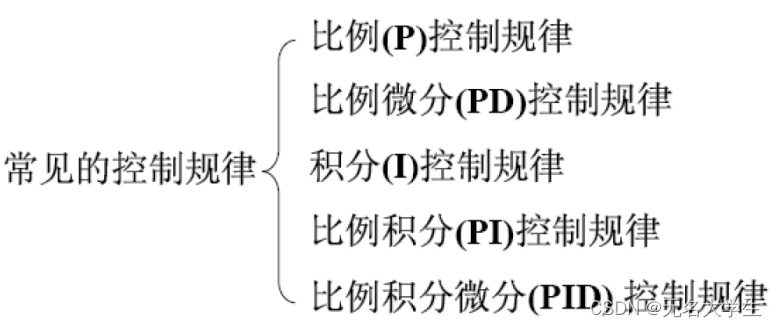
4. 基本控制规律
PID (Proportional Integral Differential )控制:对偏差信号e(t)进行比例、积分和微分运算变换后形成的一种控制规律。 是控制工程中技术成熟、理论完善、应用最为广泛的一种控制策略。
适用于数学模型已知及大多数数学模型难以确定的控制系统或过程。
PID 控制参数整定方便,结构灵活。
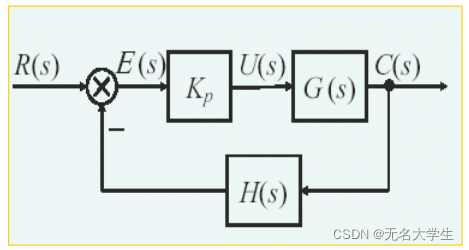
1)比例(P)控制规律
(Kp称为P控制器增益,通常 Kp>1 )
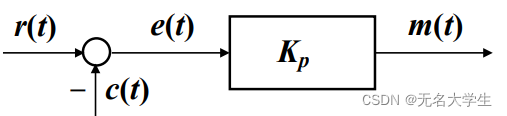
P控制器实质上是一个具有可调增益的放大器。只改变信号的增益而不影响其相位。
作用:在串联校正中,加大控制器增益,可以①提高系统的开环增益;②减小系统稳态误差;③降低系统的相对稳定性,甚至可能造成闭环系统不稳定。
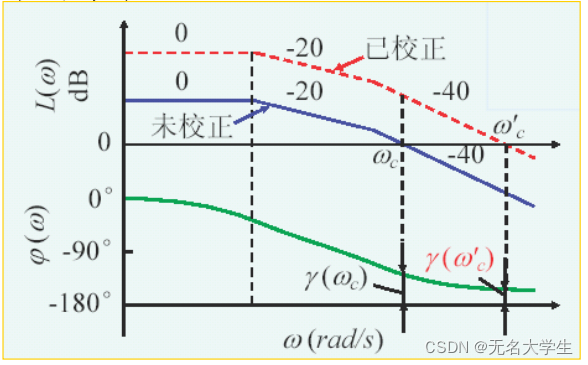
2)比例-微分(PD)控制规律
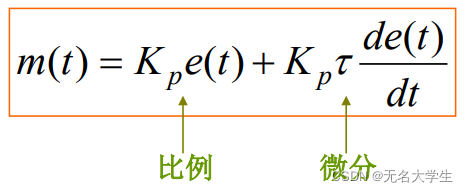
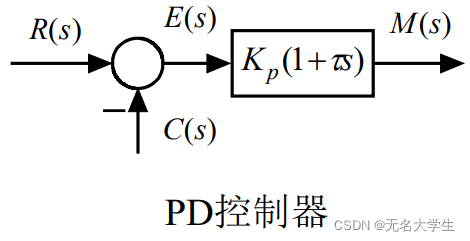
微分控制具有预测特性。
微分控制仅仅在系统的瞬态过程中起作用,一般不单独使用。 Td 就是微分控制作用超前于比例控制作用效果的时间
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1027
1027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











