







使用Eigen实现旋转矩阵更新
所有的文件和代码我放在了社区里,水平有限,大家感兴趣可以访问看看
https://github.com/gisnewbird/VIO.git
第一周的习题,比较R和q对旋转矩阵的更新效果,因为是win环境,比较复杂,就只是用Eigen实现了简单的比较,使用Sophus库的实现要更见简单也好理解些,我看到了使用Sophus库实现旋转矩阵更新
这篇整理的不错,就不重复写了。大家可以移步去看看。
====================
2019.10.19
我把Sophus库加上了,重新调整了一下
====================
开始正文
//
// Created by dukeguo on 2019/10/17.
//
#include <iostream>
#include <cmath>
#include <Eigen/Core>
#include <Eigen/Eigen>
#include <Eigen/Dense>
#include <ctime>
#include <sophus/so3.hpp>
#include <sophus/se3.hpp>
因为win中找不到M_PI,就自己定义了
//#define M_PI 3.14159265358979323846
int main(int argv, char ** argc) {
///define a minimized vecter
Eigen::Vector3d w(0.01, 0.02, 0.03);//[0.01, 0.02, 0.03]^T
Eigen::AngleAxisd rotation_vetor = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1));
Eigen::Matrix3d R = rotation_vetor.toRotationMatrix();
//std::cout << R * R.transpose() << std::endl;
Sophus::SO3d SO3_R(R);
// Quaternion update
// 四元数更新,使用Eigen库
clock_t time_quaternion = clock();
std::cout << "=================================" << std::endl;
Eigen::Quaterniond q = Eigen::Quaterniond(R);//build the R_Quaternion
//std::cout << "quaternion from rotation vector : " << q.coeffs().transpose() << std::endl;
Eigen::Quaterniond w_quaternion(1, w[0] / 2, w[1] / 2, w[2] / 2);//w 2 quaternion
Eigen::Quaterniond q_update = (q * w_quaternion).normalized();//update the quaternion & normalized
std::cout << "Eigen Quaternion updated : " << std::endl << q_update.toRotationMatrix() << std::endl;
std::cout << "使用Eigen库进行Quaternion更新 use time " << 1000 * (clock() - time_quaternion) / (double) CLOCKS_PER_SEC << "ms" << std::endl;
// 李代数更新
// 使用Sophus库
clock_t time_Sophus_so3 = clock();
std::cout << "=================================" << std::endl;
Eigen::Vector3d update_so3(0.01, 0.02, 0.03); //更新量
Sophus::SO3d SO3_updated = SO3_R * Sophus::SO3d::exp(update_so3);
std::cout<<"Sophus SO3 updated = "<< std::endl << SO3_updated.matrix() <<std::endl;
std::cout << "使用Sophus库进行SO3更新 use time " << 1000 * (clock() - time_Sophus_so3) / (double) CLOCKS_PER_SEC << "ms" << std::endl;
// 使用Eigen库
clock_t time_so3 = clock();
std::cout << "=================================" << std::endl;
double Theta = sqrt(w[0] * w[0] + w[1] * w[1] + w[2] * w[2]); // Theta = sqrt(x ^ 2 + y ^ 2 + z ^ 2)
Eigen::Vector3d a = w.array() / Theta; // vecter_a = w / Theta
Eigen::Matrix3d a_hat,I; // 0 -a3 a2
a_hat << 0, -w[2] / Theta, w[1] / Theta, // a_hat << a3 0 -a1
w[2] / Theta, 0, -w[0] / Theta, // -a2 a1 0
-w[1] / Theta, w[0] / Theta, 0;
I << 1, 0, 0,
0, 1, 0,
0, 0, 1;
//Rodrigues's formula: cos(Theta) * I + (1 - cos(Theta)) * vecter_a * vecter_a ^ T + sin(Theta) * a_hat
Eigen::Matrix3d exp_w_hat = cos(Theta) * I.array() + (1 - cos(Theta)) * (a * a.transpose()).array() + a_hat.array() * sin(Theta);
//update:
Eigen::Matrix3d R_update = R * exp_w_hat;
std::cout << "Eigen SO3 updated : " << std::endl << R_update << std::endl;
std::cout << "使用Eigen库进行SO3更新 use time " << 1000 * (clock() - time_so3) / (double) CLOCKS_PER_SEC << "ms" << std::endl;
return 0;
}
运行的结果如下:
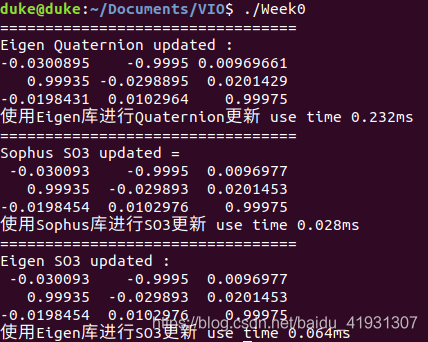
可以看到,用Eigen的话,使用四元数更新的效率更高一些,Sophus库效率的比较就没有那么明显了。















 212
212











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











