







在faster rcnn中提到的proposal的综述:
J. Hosang, R. Benenson, and B. Schiele, “How good are detection
proposals, really?” in British Machine Vision Conference
(BMVC), 2014.
J. Hosang, R. Benenson, P. Doll´ar, and B. Schiele, “What makes
for effective detection proposals?” IEEE Transactions on Pattern
Analysis and Machine Intelligence (TPAMI), 2015.
N. Chavali, H. Agrawal, A. Mahendru, and D. Batra,
“Object-Proposal Evaluation Protocol is ’Gameable’,” arXiv:
1505.05836, 2015.这个站点不错,博主很多文章都写的很好,供大家关注
http://zhangliliang.com/2015/05/19/paper-note-object-proposal-review-pami15/
Authors
Jan Hosang , Rodrigo Benenson , Piotr Dollár , and Bernt Schiele

Jan Hosang
Abstract
本文比较了12种proposal方法,提出了average recall的评价标准。
1 Introduction
对于滑动窗口,每一个目标大约 104−105 个窗口,如果考虑多目标及bbox的aspect ratio,又会增加几个数量级。所以需要使用detection proposal的方法。
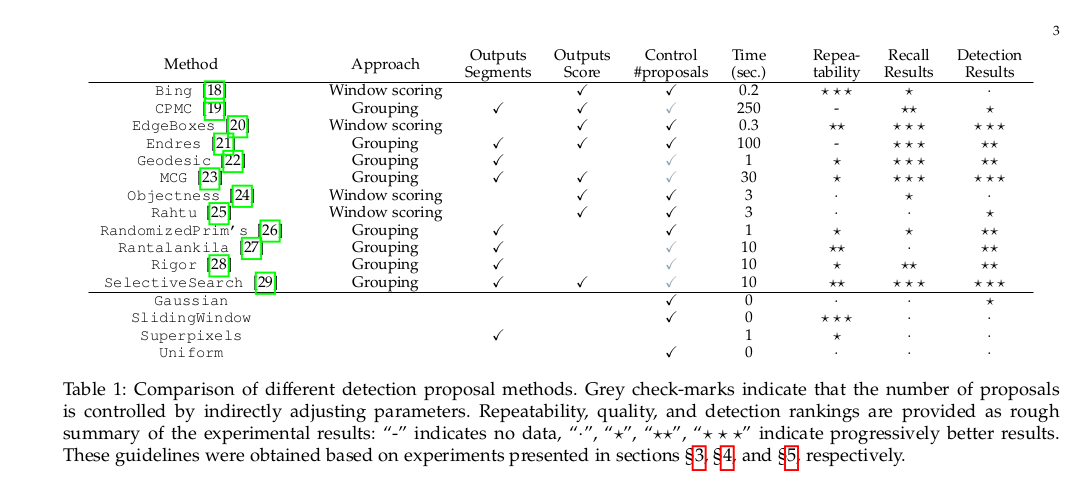
2 Detection proposal methods
作者将其分为两类:
1. grouping methods,代表:Selective Search,将原图片打碎然后聚合
2. Window scoring methods,代表:objectness,先划分很多窗口,然后分别打分,取高分窗口。
先overview一下:
2.1 Grouping proposal methods
作者将其分为三类grouping superpixels (SP),graph cut(GC),edge contours(EC),下面分述之:
1. selective search(SP)具体内容可见 http://blog.csdn.net/mao_kun/article/details/50576003 这里补充以下什么是超像素http://www.kev-smith.com/papers/SLIC_Superpixels.pdf 看起来挺炫的,ss没有学习的参数,人为定义聚合的方式。
2. RandomizedPrim’s(sp):与ss使用相同的特征,但是聚合方式是随机化的,聚合的概率是学习得到的。速度提高了。
3. Rantalankila(sp):与ss使用的聚合策略相同但是用的特征不同,之后它得到的segments用做graph cuts的种子
4. Chang(sp):结合saliency和objectness 聚合超像素得到segmentation
5. CPMC(GC):关于graph cut http://blog.csdn.net/zouxy09/article/details/8532111,避免初始化分割,使用几个不同的种子和unaries计算图分割,最后的结果使用大pool of features排序
6. Endres(GC):从occlusion boundaries建立一个分层的分割,使用不同的种子和参数graph cut,proposals的排序向着多样性的放方向进行
7. Rigor(GC):相当于CPMC的增强版,速度提高了,在multiple graphcut中重复使用计算,使用了fast edge detections。
8. Geodesic(EC):EC就是直接使用edge contours进行分割,这里从fast edge的over segmentation开始,classifers用于放置geodesic distance transform的种子,每个distance tansform 的level sets 又define了proposals,具体的还是看原文吧~
9. MCG(EC):在fast edge的基础上引入了快速计算multiscale 分层分割,基于edge strength进行merge,生成的结果使用size/location/shape/edgestrength等排序。
2.2 Window scoring proposal methods
这种方法一般很快,但是精度低,因此有些方法对生成的windows进一步refine。
1. objectness:首先,从image的salient locations选取proposals,然后根据颜色/边界/location/size/strong superpixel straddling cue等线索来打分
2. Rahtu:起始的pool of proposal包括 独立的superpixels, pairs ,triplets of superpixels, multiple randomly sampled boxes,然后进行objectness中的打分,加入了low level features,强调NMS的重要性。
3. Bing:使用edge特征训练的分类器,应用于滑动窗口,速度很快,但是被指出分类的作用很小。
4. Edgeboxes[EC]:也是起始于滑动窗口,但是又应用了通过决策森林得到的目标边界估计及一系列的refinement,没有学习的参数,也用到nms等
5. Feng:对于滑动的窗口使用显著性打分,作者引入了新的显著性measures(包括与背景的融合难易)
6. Zhang:使用特定种类的数据训练一个级联的svms分类器,作用于窗口的梯度特征,但是不知道其泛化能力如何。
7. RandomizedSeed:使用多随机种子的超像素maps来给候选框打分,打分方法类似于objectness中的strong superpixel straddling cue,作者强调多超像素maps的重要性。
2.3 Alternative proposal methods
- ShapeSharing:这名字的意思就是examplars与testimage的形状通过马match edge来共享(没有参数),之后通过graph cut来融合和refine。
- Multibox:直接使用神经网络回归一定数量的proposals,通过bias来diversify proposals的位置,效果不错
2.4 Baseline proposal methods
作者使用了4个方法来作为baseline:uniform,gaussian,slidingwindow,superpixels
2.5 Proposals versus cascades
级联就是使用快速但不精确的分类器,来去掉不好的proposals
3 Proposal Repeatability
Repeatability是在各种扰动的情况下,算法依然能够得出相似的proposal的能力,作者进行质量/光照/模糊/噪声等干扰检查其repeatability,使用IoU评价,定义repeatability为recall vs. IoU threshold 曲线下的面积。
为了避免大尺寸窗口的影响,作者将proposal分为10分,求平均得到最终的结果,另外CPMC,Endres太慢,作者没有实验。
结果是:
1. Scale:影响较大,bing 更好点
2. JPEG artefacts:bing 最好
3. Rotation :都差不多
4. illumination:趋势相似,bing更好
5. Blur:相似
6. salt and pepper noise:该因素影响比较大
结论:Bing在repeatability中表现最好,EdgeBoxes也不错。
4 Proposal Recall
三种评价:
1. 一定数量的proposal的IoU
2. 一定IoU需要的proposal数量
3. 作者提出的average recall AR:数量与0.5-1之间的IoU的平均recall的关系
结论:
MCG/EdgeBoxes/Selectivesearch/rigor/geodesit最好,SS效率最高,在数量少于1000时MCG/endres/CPMC结果很好。
这些方法分为两类:1定位精确,随着IOU的增加,recall逐渐减少2定位不准确,recall drops rapidly。bing,rahtu,objectness,edgeboxes是属于后者,bing最严重。
以AR为标准,MCG表现最好,endres,edgeboxes在数量少的时候表现好,rigor ss在数量多的时候表现好。
另外各种方法在不同数据集上表现相似。
5 using the detection proposals
比较各方法在不同detection方法的表现:
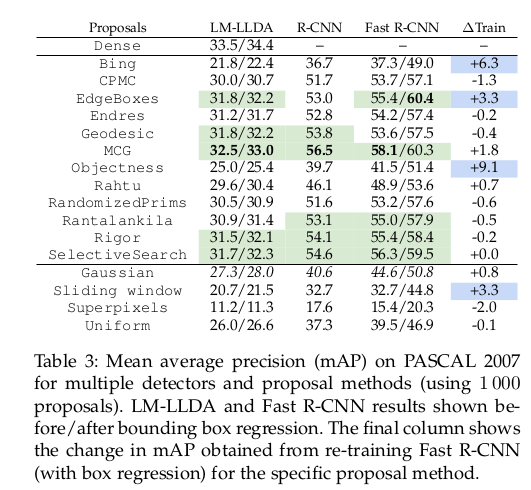
5.2 LM-LLDA
top 5: mcg,SS,EdgeBoxes,Geodesic,Rigor
可以发现对于自行车等物体,这几种方法表现都不是很好
5.3 R-CNN
Rcnn和fast rcnn的预训练模型都是在ss上预训练的,最后一排是重新训练之后的结果。
5.4 AR
AR与mAP有较好的相关性
5.5 tuning
使用AR指导调整proposal method-EdgeBoxes得到了更好的结果
5.6 Detection with oracles
- all ground truth annotations
- nms
两种方法成绩都有提高 nms提高最多
6 discussion
Top methods:
SS,merge superpixels
Rigor,Graph cut
MCG,generates hierarchical segmentations
EdgeBoxes,socres windows
1. 这些方法原理不同但是表现相似
2. 定位精度(IoU)和recall都很重要
3. repeatability,所有的方法的repeatability都不太好,repeatability好可能会提高最终的表现,但并不绝度
4. 重要特征:repeatability,recall,localisation,speed。















 975
975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









