






来源 | 湖南大学机器人视觉感知与控制技术国家工程实验室
1
项目简介基于室内监控摄像头的多机器人协作分拣搬运系统,主要利用中央处理服务器通过获取多个分布在四周的网络监控摄像头的图像。
对处于视频图像中的机器人进行实时精准的三维坐标定位(定位精度在3cm以内),同时对处于图像中的物体进行识别和定位。
然后进行路径规划处理,再调度多个机器人协作完成物体分拣、物流运输等多机协作任务。
2
项目思路首先,通过相机标定得到网络监控摄像头的相机参数,然后中央处理服务器读取多个监控摄像头的图像,通过ARtag识别+多相机融合算法实现对机器人的实时精准三维坐标定位。
并且基于tensorflow神经网络对图像中的物体进行识别,再通过多相机融合算法实现物体的定位,然后通过这些定位信息结合室内障碍物分布情况实现路径规划。
在中央处理服务器经过一系列的整合、思考、规划后,对接入该系统的所有机器人发送控制指令,控制机器人各司其职,完成物体的拾取、分类、搬运。
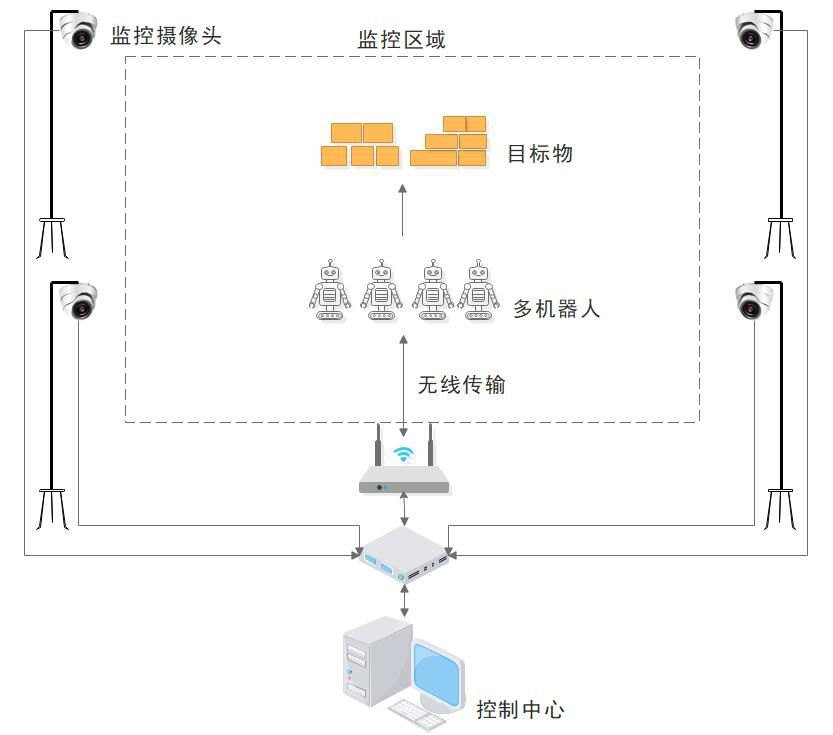
图1 多机器人协作示意图
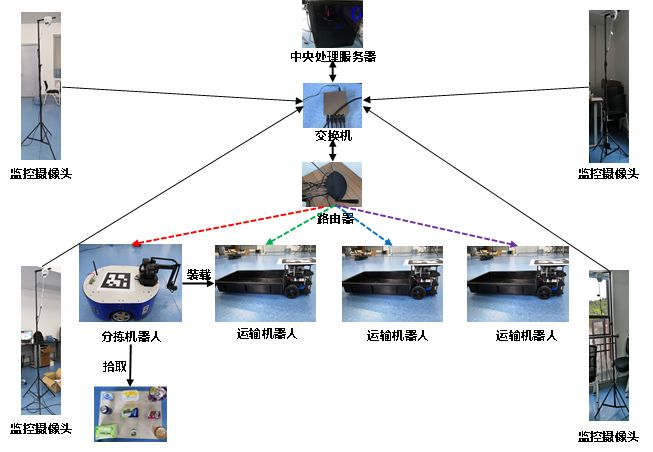
图2 多机器人协作系统
3
机器人实物展示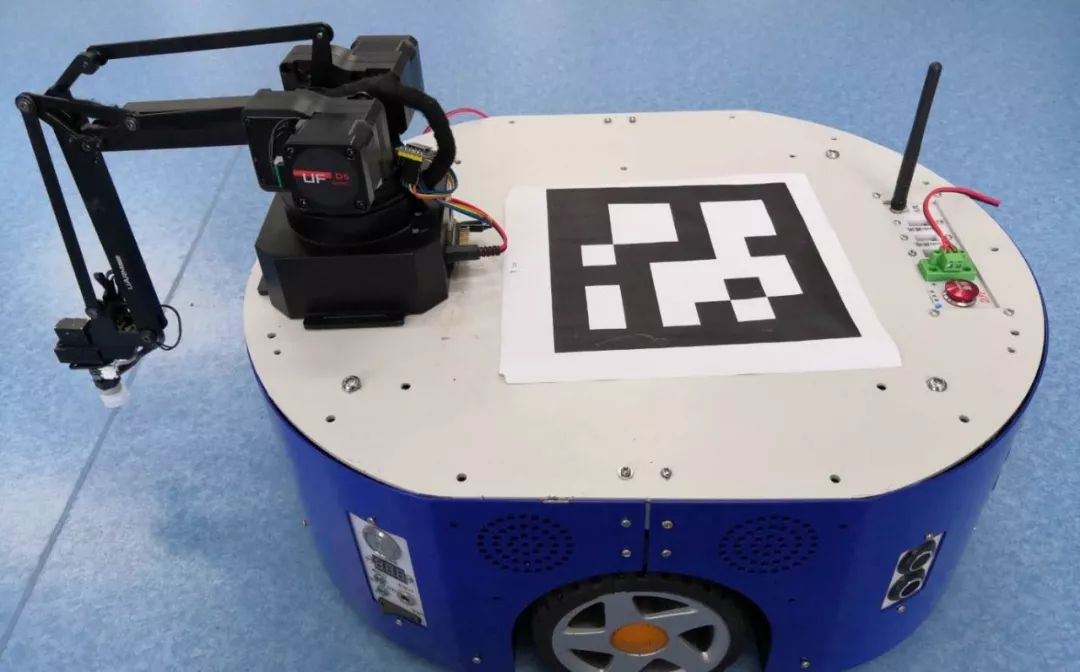



图3 多机器人协作系统
4
多机器人-视频搬运展示-END-
往期好文合集
干货 | 双目摄像头实现手势识别,完美还原人体运动手势。戳这里>>
5
最后若觉得文章不错,转发分享,也是我们继续更新的动力。
5T资源大放送!包括但不限于:C/C++,Linux,Python,Java,PHP,人工智能,PCB、FPGA、DSP、labview、单片机、等等!
在公众号内回复「更多资源」,即可免费获取,期待你的关注~

长按识别图中二维码关注
完整视频请点击阅读原文进行查看

















 1300
1300

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









