






https://static.generation-robots.com/pdf/agilex-limo-user-manual.pdf
测试底盘
roslaunch limo_base limo_base.launchrostopic pub /cmd_vel geometry_msgs/Twist "linear:
x: 0.2
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
键盘操控:
roslaunch limo_bringup limo_teletop_keyboard.launchMoving around: K是停止。
u i o
j k l
m , .
测试雷达:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=falseroslaunch limo_bringup lidar_rviz.launch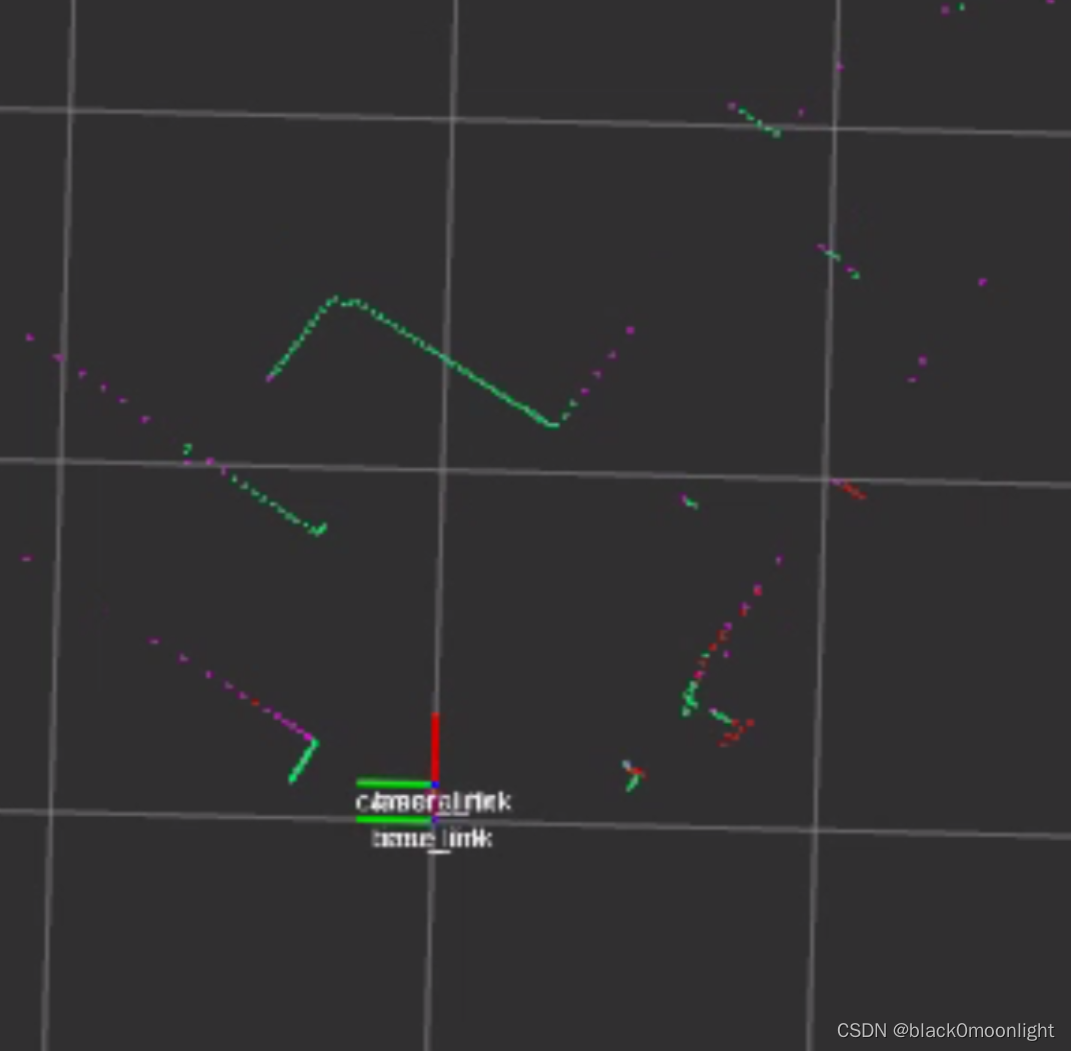
gmapping建图:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=falseroslaunch limo_bringup limo_gmapping.launch 
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/rosrun map_server map_saver -f student_room读取地图















 1041
1041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









