







官方文档:
Go1 — Unitree_Docs 1.0rc documentation
GitHub - unitreerobotics/UnitreecameraSDK: Unitree GO1 camera SDK
CSDN:
宇树Unitree camera 双目鱼眼睛的使用_宇树a1 调用摄像头-CSDN博客
部署在Go1身上的手势识别_unitree go1-CSDN博客
1. 通信框架
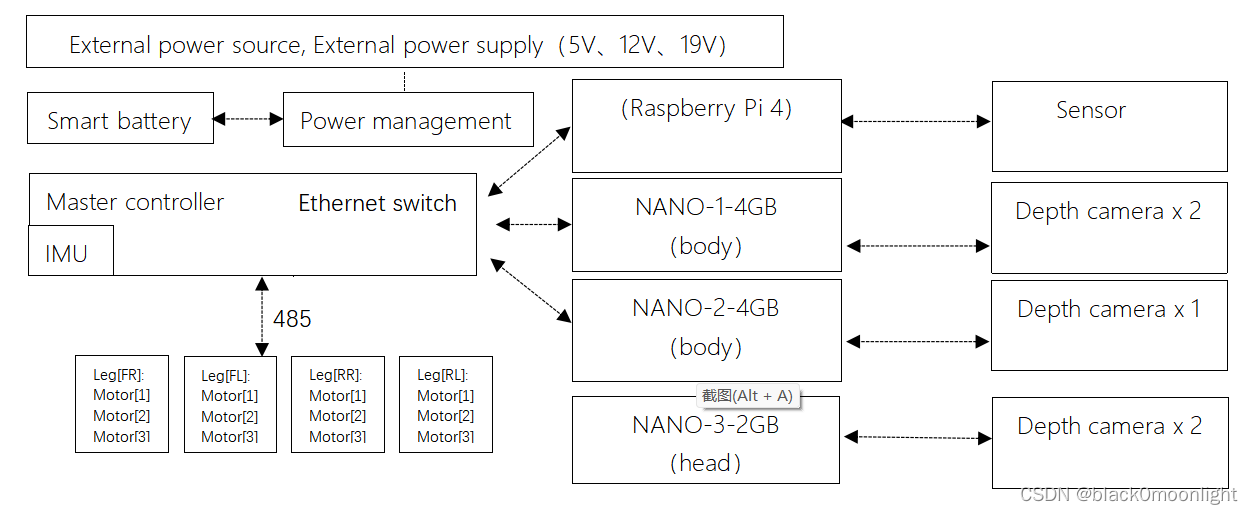
1.1 IP地址
连接机器狗热点(出厂WiFi名称为Goxxxxxxxx,密码为00000000)
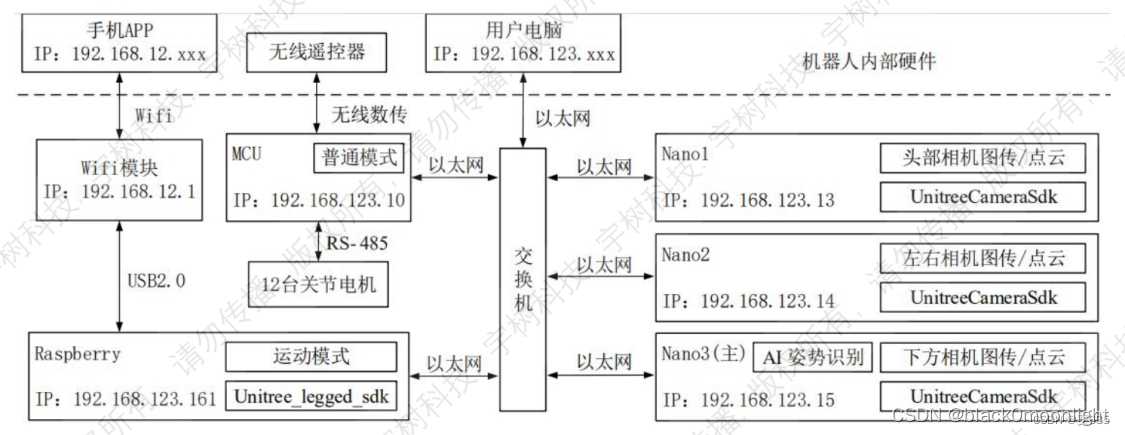
(1)进入Motion Control Board: RasPi 4B (192.168.123.161)
ssh pi@192.168.123.161
123进入此界面后,可以使用以下命令进入其他的板卡。注意不同板卡的切换需要使用exit退回pi的终端。
(2)进入Main control board: MCU (192.168.123.10) Connection refused, 可能不被允许。
ssh unitree@192.168.123.10
123(3)进入头部相机板卡: nano2gb (head, 192.168.123.13)
ssh unitree@192.168.123.13
123(4)进入左右相机板卡:Nano (body, 192.168.123.14) unitree@unitree-desktop(背面接口的板卡)
ssh unitree@192.168.123.14
123(5)进入下方相机板卡Sensing motherboard: Nano or NX (body, 192.168.123.15)
ssh unitree@192.168.123.15
123如果需要使用wifi连接go1,则必须连接树梅派。如果通过局域网连接go1,则需要设定用户ip地址为192.168.123.XXX。
2. 相机
进入各个板卡的主要目的是设定相关的相机设定。
2.1. 在unitree-desktop测试左右相机读取
首先下载GitHub - unitreerobotics/UnitreecameraSDK: Unitree GO1 camera SDK并发送到左右相机板卡:Nano (body, 192.168.123.14) unitree@un
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1953
1953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









