







文件改动
-
首先是ikdtree,看lasermapping.cpp的时候很明显用的是fastlio1中的ikdtree,因为不需要模板,所以需要补充fastlio1中的ikdtre.

-
然后就是cmakelist中的项目名称,统一改成fast_lio,因为不改的话,后面编译的时候就会找不到pose6d这个自定义消息,#include <fast_lio/Pose6D.h> 因为是这样引用的.
-
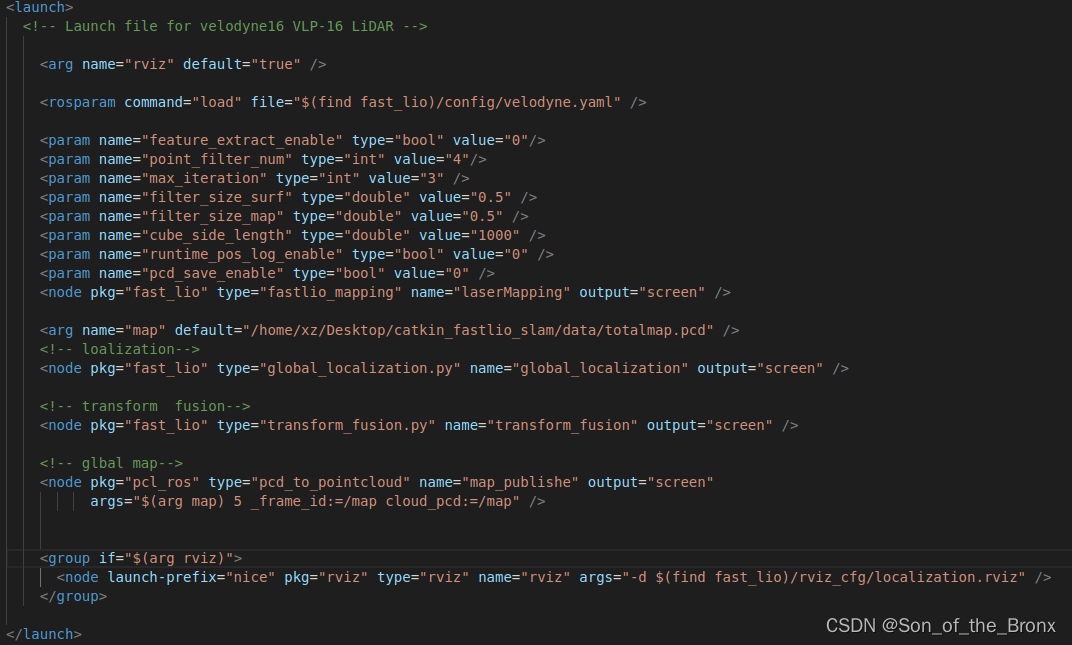
launch文件中的项目名称也要改成fast_lio.
总结
虽然编译过了,但是global_localization.py脚本有问题,因为他依赖open3d的,但是python2安装不上open3d,安装的时候出各种问题。
open3d用python3安装很方便,python2装不了,放弃,浪费一天了。ubuntu20的话应该能跑起来。














 667
667











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









