






在官网下载Livox-SDK-master,livox_ros_driver和ros_numpy。
Livox-SDK-master,livox_ros_driver安装跟着官网教程走即可
编译FAST_LIO_LOCALIZATION所出的问题: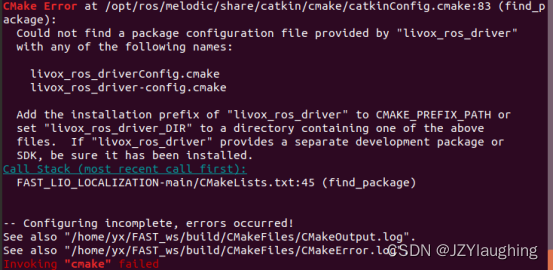
找不到“livox_ros_driver”提供的包配置文件,这是因为你没有安装或者在安装livox_ros_driver之后没有使用 source ./devel/setup.sh 命令更新当前ROS包环境。
注意:source ./devel/setup.sh 该命令只在当前的终端中有效,所以报错有可能是因为你在新建的终端窗口中运行 catkin_make。这种情况只需要先去指定目录下先source一下再回到~/catkin_ws/src目录下catkin_make,即可解决。
cd ws_livox
source ./devel/setup.sh
cd ~/catkin_ws/src
catkin_make
到这个网站hku-mars/ikd-Tree at 3d115a41377243420a74fc15dd7cf7ef337730df (github.com)下载三个文件下来后复制粘贴进FAST_LIO_LOCALIZATION-main/include/ikd-Tree文件夹中。
报错没有fast_lio/Pose6D.h,这个时候只需要进入FAST_LIO_LOCALIZATION-main/include/common_lib.h文件中,把这个文件中的所有fast_lio都改为fast_lio_localization,重新编译就没问题了。















 277
277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









