







1.位置式PID
e(i) 是累计误差。
PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅.(转载)
重点:积分可能会很大,也就是饱和了,要从饱和退出需要一定时间,这个时候调整就需要很长时间。
一般位置式PID使用PD
2.增量式PID
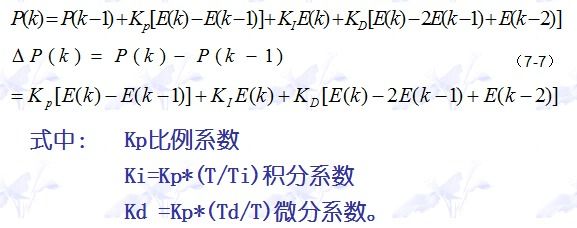
增量式需要对KI*E(k) 做限幅度
下面式记录总结比较好的PID文章
1.位置式PID
e(i) 是累计误差。
PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅.(转载)
重点:积分可能会很大,也就是饱和了,要从饱和退出需要一定时间,这个时候调整就需要很长时间。
一般位置式PID使用PD
2.增量式PID
增量式需要对KI*E(k) 做限幅度
下面式记录总结比较好的PID文章
 5220
1万+
5220
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























