






1.PID算法连续公式

-
Kp——比例增益,Kp与比例度成倒数关系
-
Tt——积分时间常数
-
TD——微分时间常数
-
u(t)——PID控制器的输出信号
-
e(t)——给定值r(t)与测量值误差
2.PID算法的一般形式
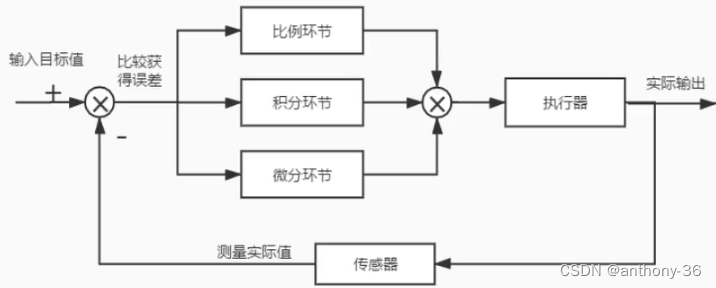
PID控制其实就是对偏差的控制过程,如果偏差为0,则比例环节不起作用,只有存在偏差时,比例环节才起作用;积分环节主要是用来消除静差,所谓静差,就是系统稳定之后输出值和设定值之间的差值,积分环节实际上就是偏差积累的过程,把积累的误差加到原有系统上以抵消系统造成的静差;而微分信号则反应了偏差信号的变化规律,也可以说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的预知性。
①连续公式:

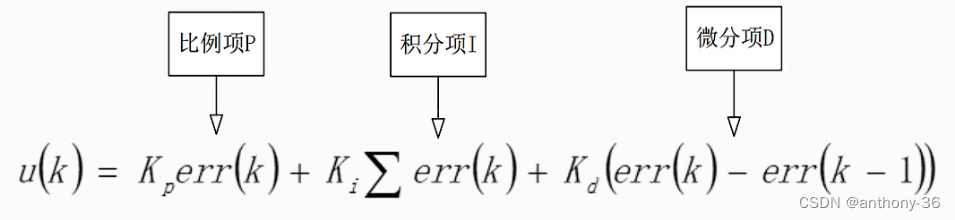
②离散公式:(位置式PID算法公式——全量式PID)


③增量式PID
根据前面的位置式公式:
第一步,将k-1带入到k得:

第二步,由△u=u(k)-u(k-1)得:

上述公式则为增量式PID,从公式看出增量式PID的输出与近三次的偏差有很大关系。
3.位置式PID和增量式PID对比
- 增量式算法不需要对积分项累加,控制量增量只与进几次的误差有关,计算误差对控制量计算的影响较小。而位置式算法要对进几次的偏差进行积分累加,容易产生较大的累加误差。
- 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作影响比较小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作;而位置式的输出直接对应对象的输出,因此对系统影响较大。
- 增量式算法控制输出的是控制量增量,并无积分作用,因此该方式用于执行机构带积分部件的对象,如步进电机等,而位置式算法适用于在执行机构不带积分部件的对象,如电液伺服阀;
- 在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
①位置式PID优缺点
- 优点:位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置是一一对应的,因此在执行结构不带积分部件的对象中可以很好应用。
- 缺点:每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
②增量式PID优缺点
- 优点:误动作时影响小,必要时可用逻辑判断的方法去掉出错数据;手动/自动切换时冲击小,便于实现无扰动切换;算式中不需要累加,控制增量△u(k)的确定仅与最近3次的采样值有关,在速度闭环控制中有很好的实时性。
- 缺点:积分截断效应大,有稳态误差;溢出的影响大,有的被控对象用增量式则不太好。
4.位置式离散PID公式
-
比例项(P)
成比例的反应控制系统中输入和输出的偏差信号,只要偏差一旦产生,就立即产生控制的作用来减小产生的误差。
一般情况增大比例系数可以加快系统的响应,增大比例系数有助于减小静差。
-
积分项(I)
在比例控制环节中产生了静态误差,在积分环节中,主要用于消除静态误差提高系统的无差度。
一般情况下增加积分时间有利于减小超调,系统稳定性增加,但是会增长消除静差的时间
- 微分项(D)
微分环节的作用是反应系统偏差的一个变化趋势,可以在误差来临之前提前引入一个有效的修正信号。
一般情况下微分项具有超前调节的作用,抑制震荡。
分项(D)
微分环节的作用是反应系统偏差的一个变化趋势,可以在误差来临之前提前引入一个有效的修正信号。
一般情况下微分项具有超前调节的作用,抑制震荡。
















 2322
2322











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











