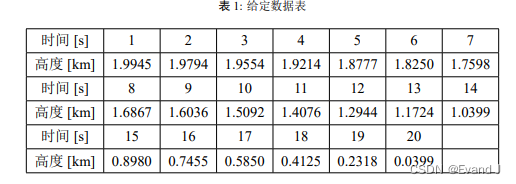
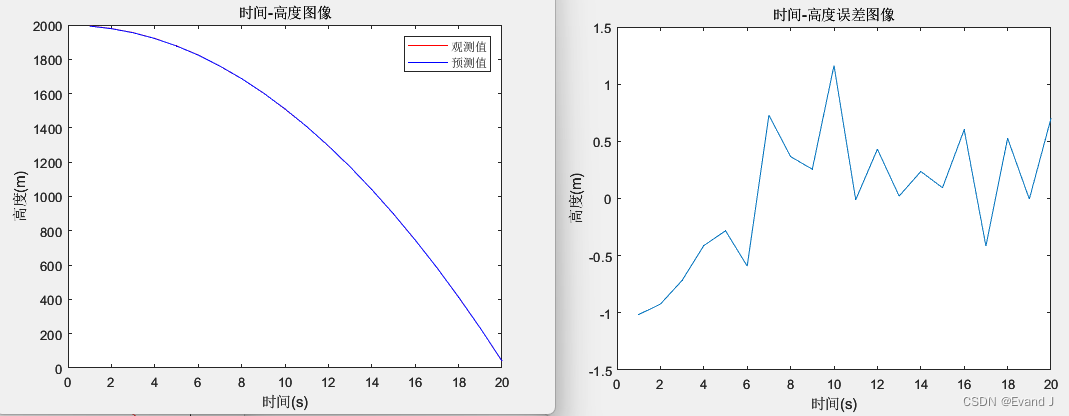
背景 已知一物体做自由落体运动,对其高度进行20次测量,测量值如下表:(g=9.80m/s2). 设高度的测量误差分布为: N(0, 1),该物体的初始高度h0和速度v0分布也为高斯分布,且: 试求该物体高度和速度的随时间变化的最优估计(matlab Kalman filters)。N(0, 1),该物体的初始高度h0和速度v0分布也为高斯分布,且:试求该物体高度和速度的随时间变化最优估计(matlab Kalman filters) 计算结果 程序源码 下述代码直接复制到MATLAB上面,可以直接运行:








 本文通过MATLAB应用卡尔曼滤波器(Kalman filters)来求解自由落体物体高度和速度随时间变化的最优估计。在假定高度测量误差为高斯分布的情况下,给出了初始高度h0和速度v0的高斯分布信息,并提供了实际的测量数据和完整的MATLAB源代码。
本文通过MATLAB应用卡尔曼滤波器(Kalman filters)来求解自由落体物体高度和速度随时间变化的最优估计。在假定高度测量误差为高斯分布的情况下,给出了初始高度h0和速度v0的高斯分布信息,并提供了实际的测量数据和完整的MATLAB源代码。


 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5668
5668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








