







基于捷联惯性导航系统的水下组合导航方案研究及其数据融合技术的实现
文章目录
- 研究背景
- 系统组成
- 捷联惯性导航系统(SINS)
- 地形匹配
- 多普勒计程仪
- 磁罗经
- 信息匹配模式
- 数据融合技术
- MATLAB 代码示例
- 更多技术(创新点)
- 结论
- 建议
研究背景
水下导航技术在海洋探测、潜艇航行、无人水下航行器(UUV)等领域具有重要意义。由于水下环境的复杂性和信号的衰减,传统导航手段(如GPS)无法有效应用。因此,如何设计一个高效、可靠的水下导航系统成为研究的热点。本文提出一种基于捷联惯性导航系统(INS)、地形匹配、多普勒计程仪和磁罗经的组合导航方案,以提升水下导航的精度和可靠性。
系统组成
捷联惯性导航系统(SINS)
SINS通过测量加速度和角速度来推算物体的当前位置和姿态,具有高频率和高精度的特点。但由于误差积累,长期运行会导致定位精度下降。
地形匹配
地形匹配方法利用海底地形数据库与实时测量数据进行比对,通过特征点匹配实现定位,适用于已知地形的水域。
多普勒计程仪
多普勒计程仪通过测量声波的频率变化,计算相对速度,为导航提供实时速度信息,适合动态环境下的实时定位。
磁罗经
磁罗经用于测量航向,通过与其他导航信息的融合,提供稳定的方位参考。
信息匹配模式
在组合导航系统中,信息匹配是实现高精度导航的关键。采用以下信息匹配模式:
- 数据预处理:对各传感器数据进行滤波和去噪处理,以提高数据质量。
- 特征提取:从地形数据中提取特征,与实时测量数据进行匹配。
- 加权融合:基于各传感器的精度和可靠性,采用加权平均的方法进行数据融合。
数据融合技术
为提升导航精度,采用扩展卡尔曼滤波(EKF)作为数据融合的主要技术。扩展卡尔曼滤波能够处理非线性系统,并提供最优状态估计。以下是EKF的基本步骤:
- 状态预测:根据系统模型预测当前状态。
- 测量更新:利用测量值更新预测状态。
- 协方差更新:更新状态估计的协方差,以反映系统的不确定性。
MATLAB 代码示例
以下是基于EKF的水下导航数据融合示例,融合INS和多普勒计程仪的数据:
% MATLAB代码示例:扩展卡尔曼滤波融合INS和多普勒计程仪数据
% 清空环境
clc;
clear;
close all;
% 模拟参数
dt = 1; % 时间步长
numSteps = 50; % 时间步数
true_position = cumsum(randn(numSteps, 1)); % 真实位置
ins_measurements = true_position + randn(numSteps, 1) * 0.5; % INS测量
doppler_measurements = true_position + randn(numSteps, 1) * 1; % 多普勒测量
% 扩展卡尔曼滤波初始化
x_est = 0; % 初始状态估计
P = 1; % 初始协方差
Q = 0.01; % 过程噪声协方差
R = 1; % 测量噪声协方差
estimated_position = zeros(numSteps, 1);
for k = 1:numSteps
% 状态预测
x_pred = x_est; % 状态预测
P = P + Q; % 协方差预测
% 随机选择INS或多普勒测量
if mod(k, 2) == 0
z = ins_measurements(k); % 使用INS测量
else
z = doppler_measurements(k); % 使用多普勒测量
end
% 卡尔曼增益
K = P / (P + R);
% 状态更新
x_est = x_pred + K * (z - x_pred);
P = (1 - K) * P; % 协方差更新
% 记录估计位置
estimated_position(k) = x_est;
end
% 绘制结果
figure;
hold on;
plot(true_position, 'g-', 'LineWidth', 2, 'DisplayName', '真实位置');
plot(ins_measurements, 'r.', 'DisplayName', 'INS测量');
plot(doppler_measurements, 'b.', 'DisplayName', '多普勒测量');
plot(estimated_position, 'k-', 'LineWidth', 2, 'DisplayName', '估计位置');
xlabel('时间步');
ylabel('位置');
legend show;
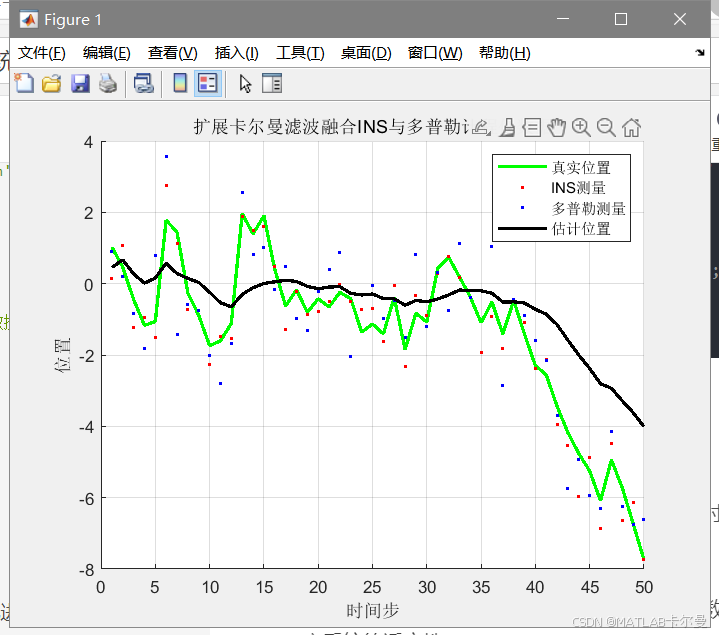
title('扩展卡尔曼滤波融合INS与多普勒计程仪数据');
grid on;
hold off;
运行结果:
更多技术(创新点)
智能系统重构技术侧重于对系统的动态变化进行实时优化和调整。可以采用以下方法:
- 自适应滤波:根据环境变化自适应调整滤波参数,以提高系统的适应性。
- 机器学习算法:利用机器学习技术对传感器数据进行分析,提升系统的自学习能力,优化导航决策。
- 实时监控与调整:建立实时监控系统,动态调整导航算法和参数,以应对不同的水下环境。
结论
通过将捷联惯性导航系统与地形匹配、多普勒计程仪、磁罗经等设备相结合,能够显著提升水下导航的精度和可靠性。本文提出的信息匹配模式、数据融合技术和智能系统重构技术,为水下导航系统的设计与实现提供了理论基础和技术支持。
建议
- 文献调研:对水下导航领域的文献进行深入研究,了解当前技术的发展和应用。
- 实验验证:通过实际实验验证所提方案的有效性和可行性。
- 代码实现:在 MATLAB 中实现各项算法,进行性能测试和优化。
- 项目报告:撰写完整的项目报告,详细记录研究过程、方法及结果。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











