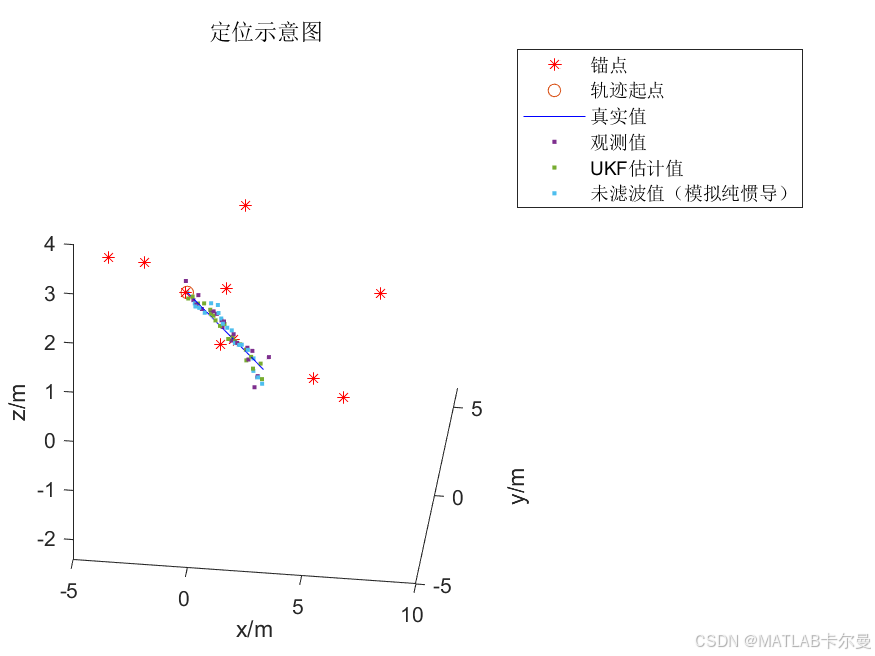
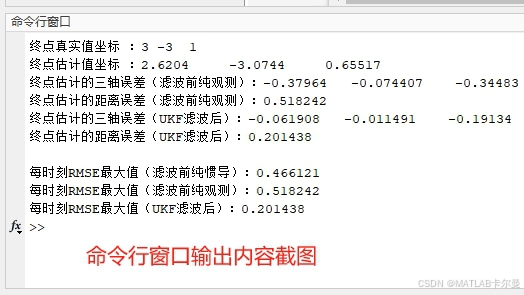
本文介绍一个MATLAB代码,实现了三维动态目标非线性定位与滤波系统,通过融合 到达角(AOA) 和 到达时间(TOA) 的混合定位方法,结合 无迹卡尔曼滤波(UKF) 处理非线性观测模型,优化轨迹精度。代码支持自适应基站数量配置,适用于复杂非线性场景的定位研究。 文章目录 运行结果 matlab代码 程序详解 代码功能概述 核心模块与技术亮点 关键参数与配置 运行结果与性能 UKF与EKF的核心区别 应用场景与扩展方向 代码使用说明 运行结果 定位示意图: 三周RMSE曲线对比(UKF估计值是最低的): 命令行输出的结果截图: matlab代码<










 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








