







本文所述的代码可用于模拟和校正三维惯性导航系统(INS)的轨迹漂移问题。通过线性分配终点误差,实现对累积漂移的补偿。为INS漂移提供一个非滤波的思路。
代码简介
代码功能概述
本程序用于模拟和校正三维惯性导航系统(INS)的轨迹漂移问题。通过线性分配终点误差,实现对累积漂移的补偿,适用于无人机自动驾驶等需要轨迹修正的场景。
核心特点
-
三维建模
- 生成包含随机游走噪声的INS漂移轨迹,模拟真实惯性导航系统的误差累积特性。
- 定义三维真实速度向量(默认值:[2; 1; 0.5] m/s),通过双重积分叠加噪声构建漂移轨迹。
-
校正算法
- 根据起点和真实终点的位置偏差,按时间线性分配校正量(
delta * correction_factors)。 - 采用空间矢量补偿方法,在原始轨迹基础上叠加校正矩阵,消除系统性漂移误差。
- 根据起点和真实终点的位置偏差,按时间线性分配校正量(
-
误差分析
- 提供RMS误差最大误差等统计指标,对比校正前后的精度提升。
- 分维度(X/Y/Z轴)展示误差绝对值变化,识别主要误差来源方向。
-
可视化输出
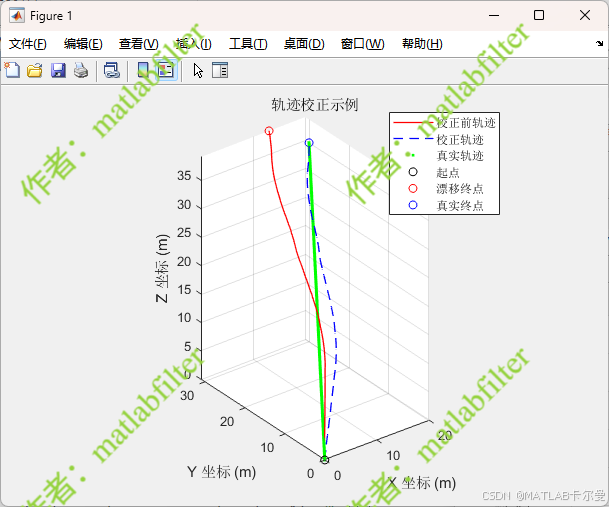
- 三维轨迹对比图:红色(漂移轨迹)蓝色虚线(校正轨迹)绿色点(真实轨迹)。
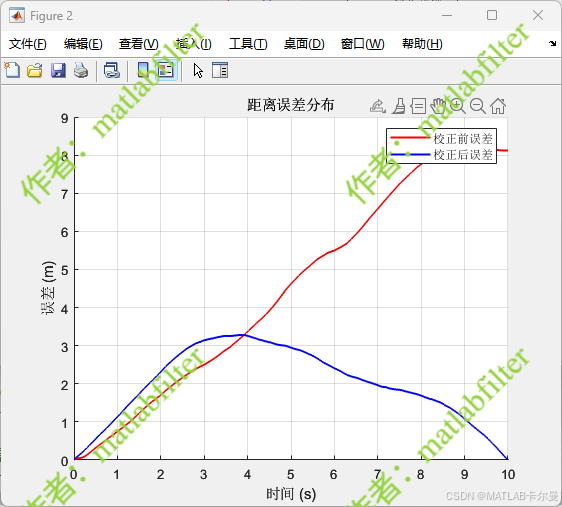
- 时间-误差曲线图:直观显示校正前后误差随时间的分布变化。
运行结果
三维轨迹对比:
距离误差曲线:
各轴误差对比:

MATLAB代码
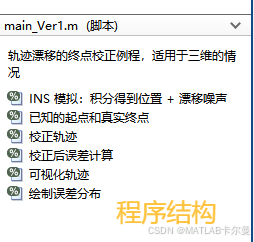
程序结构:
部分代码如下:
% 轨迹漂移的终点校正例程,适用于三维的情况
% 2025-06-24/Ver1
clear; clc; close all;
rng(0); % 固定随机数种子,便于复现
% 轨迹点数量
n = 200; % 轨迹点数量
t = linspace(0, 10, n); % 时间序列
% 模拟 INS 解算的轨迹 (包含漂移)
true_velocity = [2; 1; 0.5]; % 真实速度向量 (m/s)
%% INS 模拟:积分得到位置 + 漂移噪声
true_position = cumsum(true_velocity .* t); % 理想轨迹(无漂移)
noise_drift_vel = cumsum(0.005 * randn(3, n), 2); % 速度层面的累积漂移(随机游走)
noise_drift_pos = cumsum(noise_drift_vel,2); %位移层面的累积漂移
ins_position = true_position + noise_drift_pos; % 加入漂移后的轨迹
%% 已知的起点和真实终点
start_point = ins_position(:, 1); % 起点
true_end_point = true_position(:, end); % 真实终点
drift_end_point = ins_position(:, end); % 漂移后的终点
完整代码下载链接:https://download.csdn.net/download/callmeup/91136062
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











