










工欲善其事,必先利其器,我们所有的后续文档,需要一个硬件载体,我们根据需要自己设计开发了一款载板,兼容TX1和TX2,当然我们主要都是基于TX1的平台来进行功能和操作说明。
这里简单说一下载板的问题。NVIDIA只出售核心模块,和官方标准的开发套件,也是官方软件支持的标准硬件。但是实际使用中,要根据自己的结构和需求引出不同的接口,和裁剪不同的尺寸,这个时候应用端就一般就需要做载板开发。这个时候的载板设计,为了减少开发量,大家一般都会采用NVIDIA开源的硬件原理图的基础上进行裁剪修改,接口对应关系一般不会发生大的变化,所以很多载板其实就是长的和官方的不一致,内在其实是一样的。另外一种情况,有些厂家会进行很多资源扩展和调整,导致硬件对应关系和官方的发生了比较大的变化,这个就需要进行底层linux的开发工作了,一般改一些DTB文件就可以。
EdgeBox_EHub_tx1_tx2_E100,其中引出了核心模块两路USB3.0,和官方的有差异,所以就需要修改DTB文件后,在烧写系统时,替换成对应载板的DTB描述文件后,既可以驱动全部硬件。
EdgeBox_EHub_tx1_tx2_E100 载板,引出2路USB3.0接口,其中1路USB3.0 使用3.0HUB芯片又扩展为4路。提供烧写DTB文件,可以将所有硬件驱动正常使用。 提供使用说明书。针对网络不方便的朋友,可以提供安装好ROS,和CUDA的镜像文件,烧写后可直接使用。提供将系统从SD卡启动的操作说明,照着文档可以很方便实现SD卡跑系统。

核心模块TX1介绍Jetson TX1 介绍_机器人虎哥的博客-CSDN博客
升级版本硬件实物图:

硬件支持功能:
-
5路USB3.0
-
3路TTL串口引出,3P 3.81绿段子
-
SD卡座
-
百兆网口、HMDI、Micro usb2.0 下载烧写口
-
复位按钮 Recovery按键
-
SATA 可以用来扩展SSD存储,最大测试过960G
-
支持上电自启动,不用额外手动操作
-
DC口和3.81绿端子双电源接入接口
-
核心模块可带风扇

系统硬件PCB仿真图:

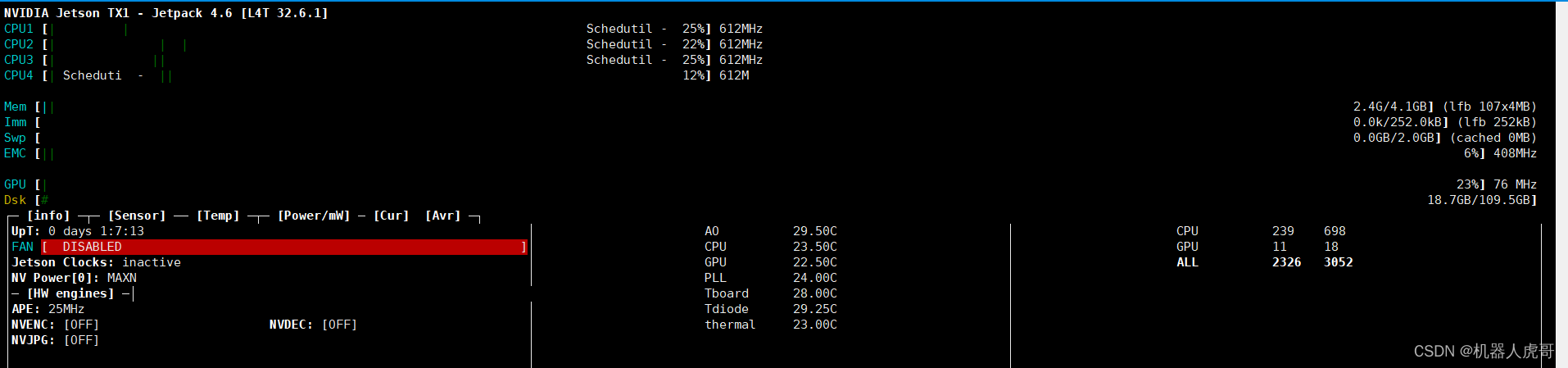
安装完毕系统后,可以看到正常的信息:
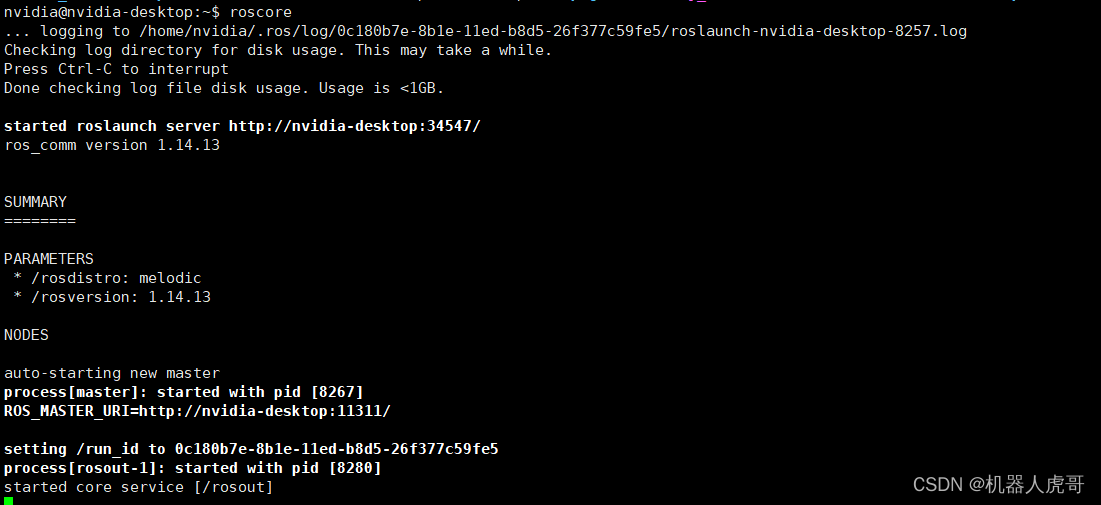
装完ROS后,也可以进行正常的使用:
在这个平台上,我们就可以开始后续的机器人控制、导航、深度学些的一些研究了
纠错,疑问,交流: 911946883@qq.com

















 1579
1579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











